주파수(CTFT) 영역에서 LTI 시스템
시간 영역에서의 컨볼루션
= 주파수 영역에서의 곱셈
전달 함수(Transfer function)
= 입력 대비 출력의 비율
LTI 시스템의 주파수 응답 : 크기와 위상 표현
크기
: 출력 신호의 크기 스펙트럼은 입력 신호 크기에 시스템의 Gain 를 곱한 것().
위상
: 출력 신호의 위상은 입력 신호 위상에 시스템의 위상 변이(Phase shift) 를 더한 것 ().
이상적인 저역 통과 필터(low-pass filter)의 크기 응답 예시
입력 신호()가 저주파의 '정보 신호'와 고주파의 '노이즈'로 구성되어 있음
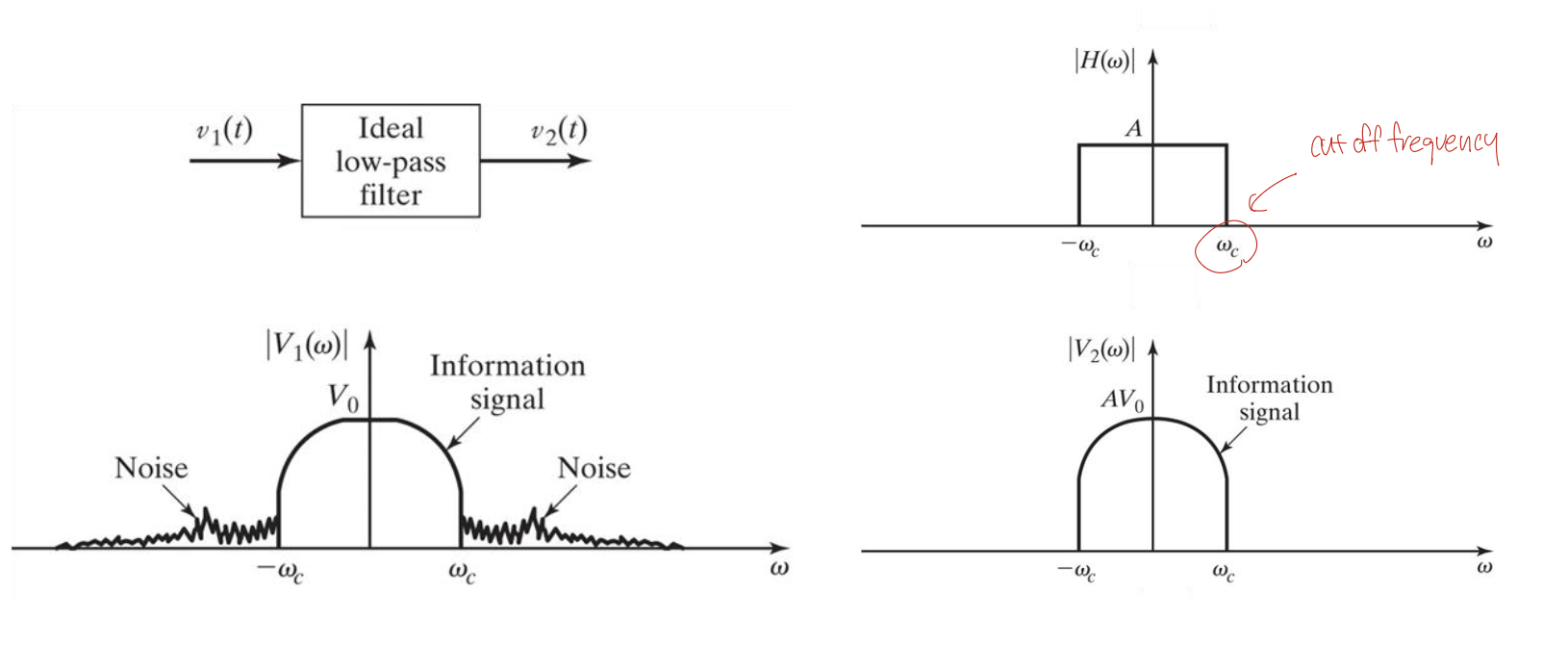
필터(H(ω))는 차단 주파수(cut-off frequency) 내부의 신호는 Gain A만큼 통과시키고 , 밖의 신호는 0으로 만듦.
결과적으로 출력 신호()에는 노이즈가 제거되고 정보 신호만 남게 됨 .
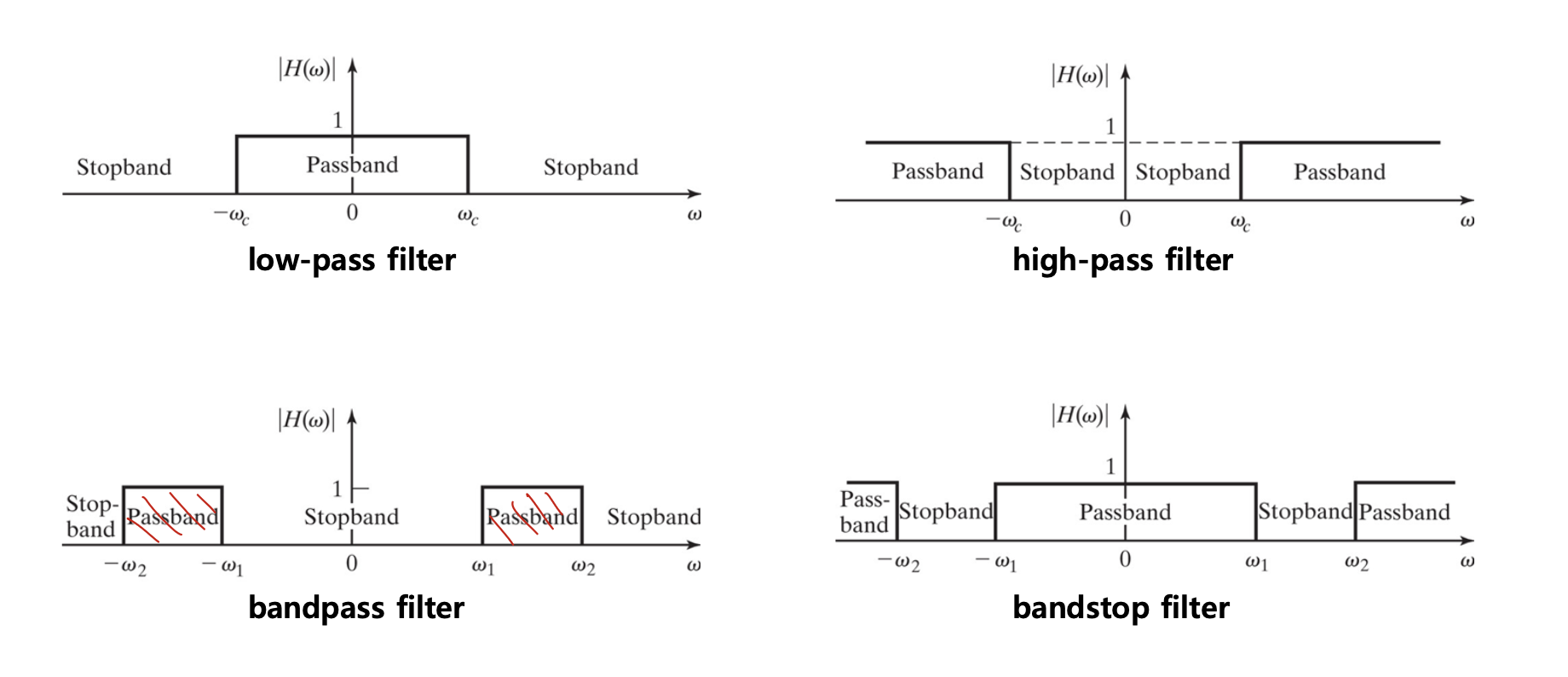
4가지 주요 필터의 크기 응답(∣H(ω)∣)
시스템의 위상 응답 특성
선형 위상 (Linear Phase)
: 위상이 주파수에 대해 선형 함수()인 경우
선형 위상은 시간 영역에서 신호의 모양을 왜곡시키지 않고
단순히 시간 지연(time-shift)시키는 효과만 가짐
Group Delay (군지연)
위상 응답을 주파수에 대해 미분한 값
-
선형 위상 시스템
: 군지연 이 α로 일정. -
비선형 위상 시스템
: 군지연 이 주파수마다 달라짐. 이로 인해 주파수 성분별로 지연 시간이 달라져 신호가 왜곡됨.
이상적인 필터의 현실적인 문제점
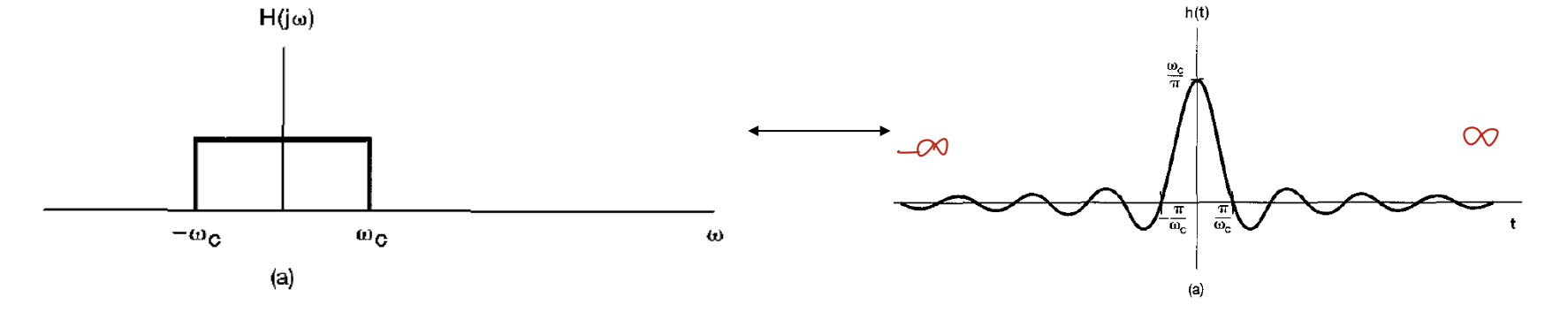
이상적인 저역 통과 필터(주파수 영역에서 사각파)를 시간 영역으로 변환
→ 임펄스 응답 는 sinc 함수
sinc 함수는 t<0일 때도 0이 아니므로 비인과적(non-causal),
시간이 무한(−∞∼∞)하기 때문에 현실에서 구현이 불가능.
따라서 필터의 이상적인 성능과 현실적인 구현 가능성 사이에 트레이드오프(trade-off) 존재.
Butterworth 필터와 Elliptic 필터의 크기 응답
-
Butterworth 필터: 천이 대역이 완만하지만(wide) 통과/차단 대역에 리플(ripple)이 없음
-
Elliptic 필터: 천이 대역이 매우 급격하지만(sharp) 통과/차단 대역 모두에 리플이 존재
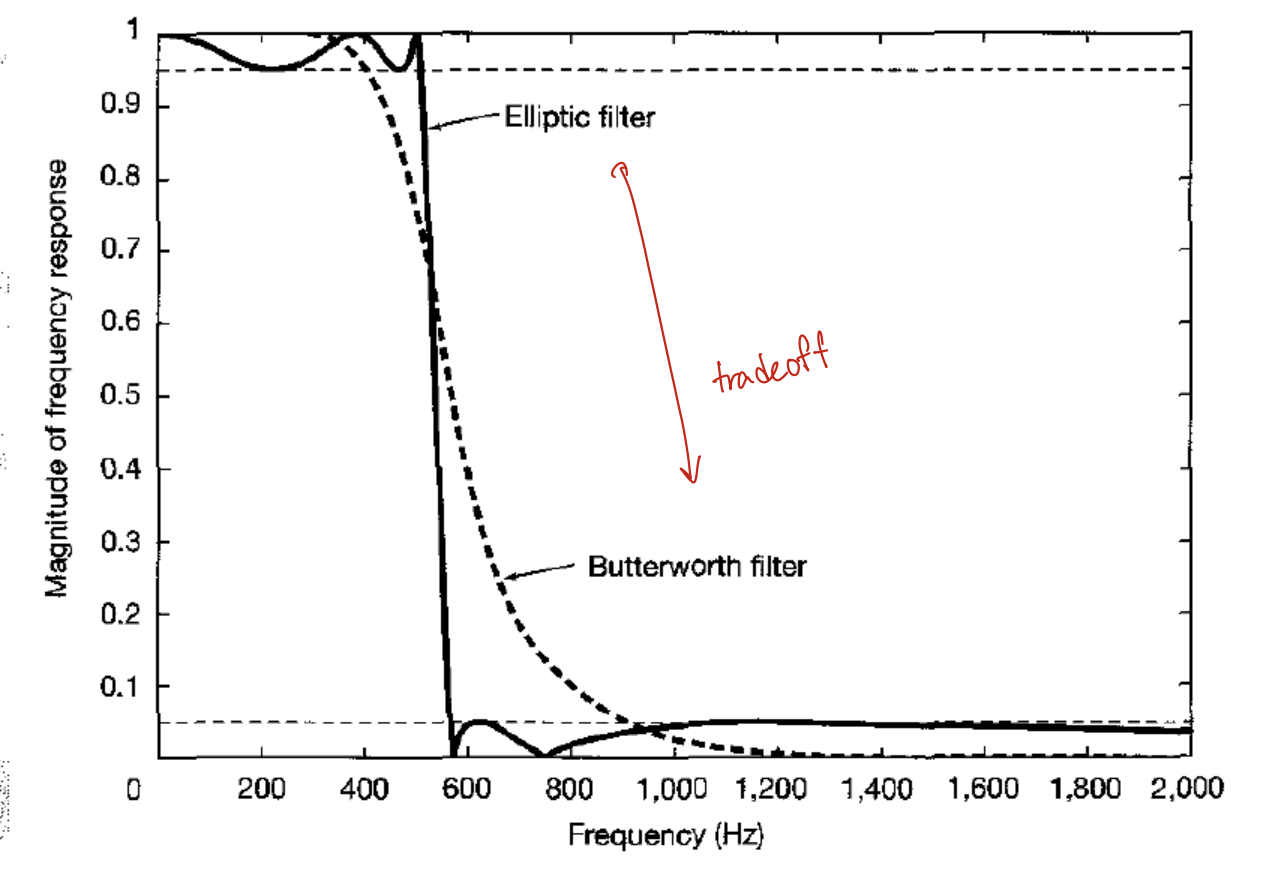
→ 더 급격한 차단 특성(Elliptic)을 얻는 대신,
리플을 감수해야 하는 트레이드오프 관계
First-order Continuous System
미분 방정식: ex. RC 회로
전달 함수:
임펄스 응답:
Second-order Continuous System
미분 방정식:
(zeta)는 감쇠비(damping ratio), 은 고유 주파수
전달 함수:
임펄스 응답: 는 ζ 값에 따라 다른 형태를 가짐

내용이 너무 재밌네요!! 잘 읽고 갑니다!! ^^