개요
-
BSP(Binary Space Partitioning, 이진 공간 분할법)이란 재귀적으로 유클리드 공간을 초평면 상의 볼록 집합으로 분할하는 기법이다. 분할 과정으로 BSP 트리라 불리는 트리 구조가 만들어진다.
-
3차원(또는 2차원) 공간을 효율적으로 다루기 위해, 하나의 공간을 재귀적으로 둘씩 나누어가는 기법이라는 뜻이다.
-
3D 게임 엔진에서 맵을 렌더링할 때, 충돌 감지를 수행할 때, 레이트레이싱을 할 때 등 다양한 분야에서 연산을 최적화하려고 할 때 자주 사용된다.
-
이번에는 로그라이크류 게임에서 맵을 랜덤으로 나눌 때 어떻게 사용할 수 있는지 정리해보고자 한다.
알고리즘의 흐름
-
분할할 공간(씬, 맵, 월드 등)을 하나 정한다.
-
하나의 분할 평면(또는 분할선)을 선택하여 현재 공간을 두 개의 하위 공간으로 나눈다.
-
각 하위 공간에 대해 같은 과정을 재귀적으로 반복한다.
-
원하는 기준(최종 목적)에 도달할 때까지 이 과정을 수행한다.
-
이 과정을 거쳐 만들어진 트리를 BSP 트리라고 부른다.
-
트리의 각 노드는 분할을 위한 평면(또는 선)에 대한 정보를, 리프(leaf) 노드는 최종적으로 분할이 완료된 공간 정보를 담게 된다.
BSP 트리 만들기
- BSP 트리를 사용하여 페인터 알고리즘을 사용해 다각형을 렌더링할 수 있다. 다각형 목록에서 BSP 트리를 구성하는 재귀 알고리즘은 다음과 같다.
-
목록에서 다각형(Polygon)
P를 하나 선택한다. -
BSP 트리에 노드
N을 만들고,P를 해당 노드의 다각형 목록에 추가한다. -
목록에 있는 다른 모든 다각형에 대해 다음을 수행한다.
-
해당 다각형이
P를 포함하는 평면의 '앞(front)'에 완전히 놓여 있다면, 그 다각형을P앞쪽 노드의 다각형 목록으로 옮긴다. -
해당 다각형이
P를 포함하는 평면의 '뒤(behind)'에 완전히 놓여 있다면, 그 다각형을P뒤쪽 노드의 다각형 목록으로 옮긴다. -
해당 다각형이
P를 포함하는 평면과 교차한다면, 두 개의 다각형으로 나누어 앞·뒤 노드 각각에 옮긴다. -
해당 다각형이
P를 포함하는 평면 위에 놓여 있다면, 그 다각형을 노드N의 다각형 목록에 추가한다.
-
-
P앞쪽에 있는 다각형 목록에 대해 위 알고리즘을 재귀적으로 적용한다. -
P뒤쪽에 있는 다각형 목록에 대해서도 같은 알고리즘을 재귀적으로 적용한다.
예시
-
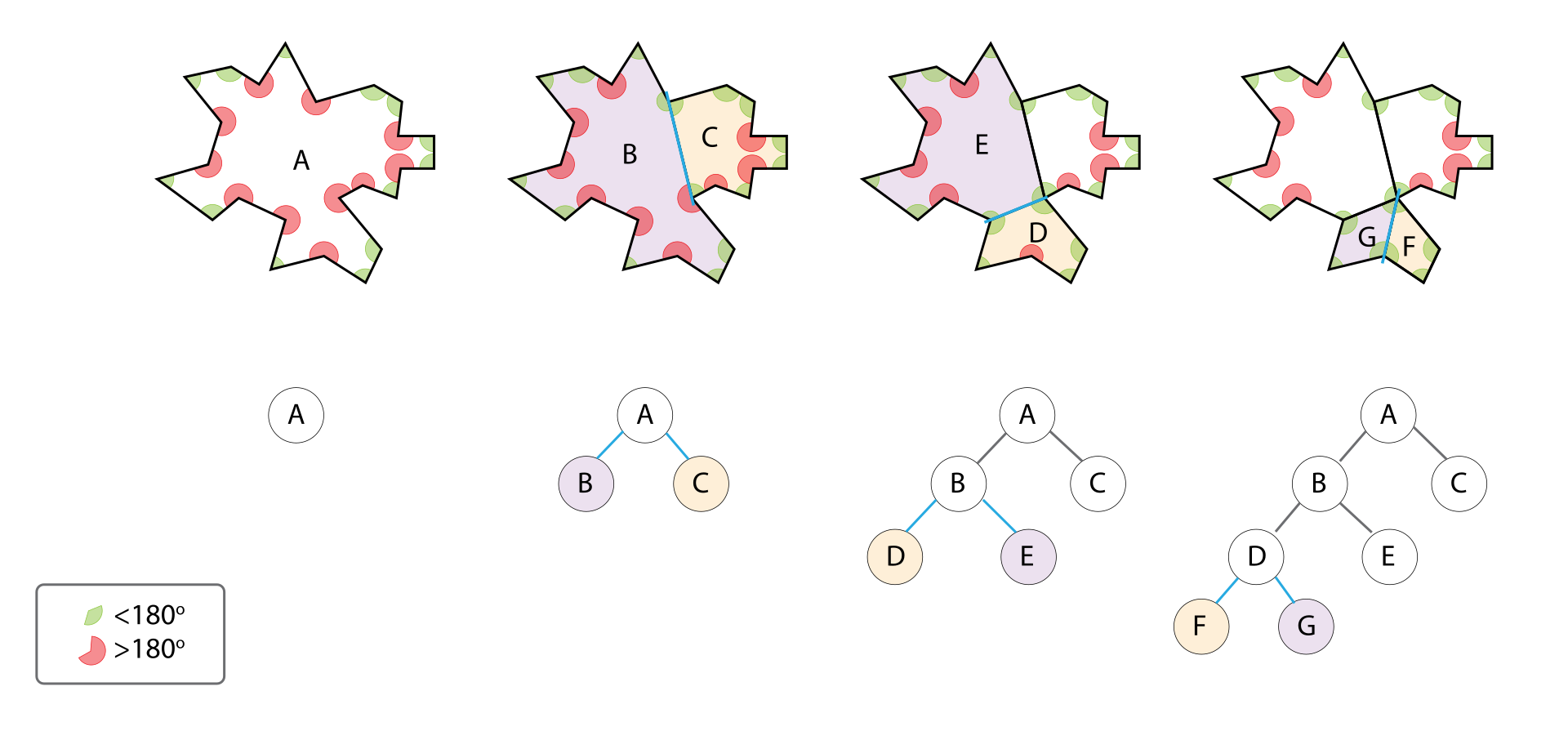
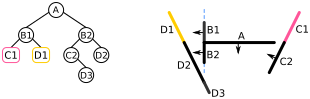
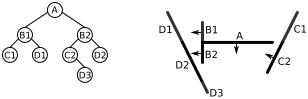
아래 다이어그램은 위 알고리즘을 사용하여 선분(또는 다각형) 목록을 BSP 트리로 변환하는 과정을 예시로 보여준다. 8단계 각각에서 위 알고리즘이 선분 목록에 적용되어 트리에 새 노드가 추가된다.
-
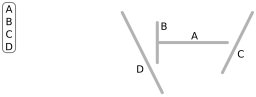
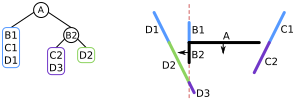
먼저 장면(Scene)을 구성하는 선분(2D) 혹은 다각형(3D) 목록을 가지고 시작한다. 트리 도식에서, ‘목록(list)’은 둥근 사각형으로, BSP 트리의 노드는 원으로 표시한다. 공간 상에서 선분의 ‘앞(front)’ 방향은 화살표로 표시되어 있다.
-
위 알고리즘의 단계를 따르면,
-
목록에서 선분
A를 하나 선택하고, -
이를 노드에 추가한다.
-
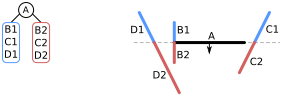
목록에 남아 있는 다른 선분들을
A가 놓인 평면(여기서는 2D이므로 직선)의 앞쪽에 있는 것(B2,C2,D2)과 뒤쪽에 있는 것(B1,C1,D1)으로 분할한다. -
먼저
A앞쪽에 있는 선분들(B2,C2,D2)을 처리한다(단계 2 ~ 5). -
그리고 나서
A뒤쪽에 있는 선분들(B1,C1,D1)을 처리한다(단계 6 ~ 8).
-
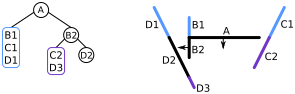
- 이번에는
A앞쪽에 있는 선분 목록(B2,C2,D2)에 알고리즘을 적용한다. 선분B2를 선택하여 노드에 추가하고, 남은 선분들을B2의 앞쪽에 있는 선분(D2)과 뒤쪽에 있는 선분(C2,D3)으로 분할한다.
B2및A의 앞쪽 목록에 있는 선분들 중D2를 선택한다. 이 목록에는 오직D2만 존재하므로, 노드에D2를 추가한 뒤에는 추가로 할 작업이 없다.
- 이제
B2앞쪽의 선분 처리를 마쳤으므로, B2 뒤쪽에 있는 선분(C2,D3)을 살펴본다. 이 중에서C2를 하나 선택하여 노드에 추가하고, 남은 선분(D3)을C2의 앞쪽 목록에 추가한다.
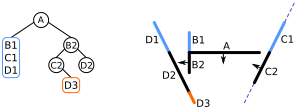
C2앞쪽 목록에 있는 선분을 확인한다. 유일한 선분은D3이므로 이를 노드에 추가하고 계속 진행한다.
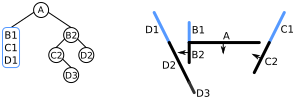
- 이제
A앞쪽에 있었던 모든 선분을 BSP 트리에 추가했으므로, 이번에는A뒤쪽에 있는 선분 목록을 처리한다. 해당 목록에서 하나의 선분(B1)을 고르고 노드에 추가한 후, 나머지 선분들을B1의 앞쪽(즉,D1)과 뒤쪽(즉,C1)으로 분할한다.
- 먼저
B1앞쪽에 있는 선분 목록을 처리한다. 여기에는D1만 있으므로, 이를 노드에 추가하고 계속 진행한다.

- 다음으로
B1뒤쪽에 있는 선분 목록에는C1만 있으므로, 이를 노드에 추가하고 BSP 트리 구성을 마친다.
- BSP 트리에 포함되는 다각형(혹은 선분)의 최종 개수는 원래 목록보다 많아질 때가 많다. 이는 분할 평면을 가로지르는 다각형(혹은 선분)이 두 개로 나누어지기 때문이다. 이 증가를 최소화하는 것이 바람직하지만, 최종 트리가 적절한 균형을 유지하도록 하는 것도 중요하다. 따라서 효율적인 BSP 트리를 생성하려면 분할 평면(알고리즘의 1단계)으로 사용되는 다각형(혹은 선분)을 선택하는 것이 중요하다.
최종 목적
-
BSP 알고리즘에서 최종 목적이란 언제까지 분할을 계속할 것인가?이다.
-
이 최종 목적은 렌더링 최적화, 충돌 검출, 레이 트레이싱, 조명(라이팅) 계산, 렌더링 파이프라인의 클리핑, 그리고 레벨 디자인(게임 맵 생성) 등이 될 수 있다.
- 렌더링 최적화(Visibility Determination)
- 예) 3D 게임 엔진에서 시야에 보이는 부분만 효율적으로 그리기 위해 공간을 분할하고, 가시성을 판단하는 용도.
- 최종 목적: 각 리프 노드가 너무 작게 잘게 분할되기 전에(적정 크기 이하로) 멈추거나, 혹은 조망(시야) 계산이 더 이상 필요 없는 수준으로 쪼개졌을 때 멈춤.
- 충돌 검출(Collision Detection)
- 예) 물리 엔진에서 객체 충돌을 빠르게 판단하기 위해 공간을 분할.
- 최종 목적: 분할된 리프 공간 내부에 포함된 오브젝트 수가 일정 기준 이하가 되면 더 이상 분할하지 않음. (예: 리프 노드에 객체가 1~2개만 남거나, 리프 공간의 크기가 임계점보다 작아졌을 때)
- 레이 트레이싱(Ray Tracing)
- 광선을 쏠 때 충돌할 가능성이 있는 폴리곤/오브젝트만 빠르게 찾기 위해 BSP 트리를 사용할 수 있음.
- 최종 목적: 광선 검출에 필요한 정확도를 만족할 만큼의 분할(즉, 충분히 세밀하게 오브젝트가 구분된 상태)이 이루어지면 더 이상 분할하지 않음.
- 레벨 디자인(게임 맵 생성)
- 예) 2D/3D 게임에서 랜덤 던전, 방, 복도 구조 등을 만들기 위해 공간을 재귀적으로 분할.
- 최종 목적: “방(룸)” 크기나 개수, 또는 연결 경로(복도)의 수가 원하는 수준에 도달할 때까지 분할. 이후 각 리프 노드를 방이나 복도로 활용.
- 조명(라이팅) 계산
- 예) 라이트맵(Lightmap)을 생성하기 위해서, 또는 GI(Global Illumination)을 계산하기 위해 공간을 분할.
- 최종 목적: 광원과 표면 간의 상호작용을 계산하기에 충분히 세밀한 분할 상태에 도달하면 더 이상 쪼개지 않음.
- 클리핑(Clipping)이나 페인터 알고리즘에 활용
- 예) 고전 렌더링 파이프라인에서 배경(뒤에 있는 오브젝트)를 먼저 그리거나, 앞의 물체에 가려지는 뒷부분은 그리지 않도록 공간 분할.
- 최종 목적: 오브젝트 간 가려짐(Visibility)을 판별하기에 충분할 정도로 나누면 멈춤.
분할 종료 조건
- 최종 목적에 따라 분할 종료 조건은 아래와 같이 정할 수 있다.
-
오브젝트 개수 기준 : 분할된 공간(리프 노드) 안에 들어 있는 오브젝트(폴리곤 등) 수가 특정 개수 이하가 되면 더 이상 분할하지 않는다.
-
공간 크기(깊이) 기준 : 분할된 공간의 부피(또는 면적)가 일정 이하로 작아지면 중단한다.
-
계산 비용과 효율의 기준 : 더 이상 분할을 해봤자 얻을 수 있는 최적화 이점이 작거나, 오히려 분할 관리 비용이 커지면 중단한다.
-
사용자가 설정한 임의의 기준: 예를 들어 게임 레벨 디자인에서 “방은 최소 3m x 3m 크기, 최대 10개” 같은 조건을 미리 설정해두고, 그 조건을 만족하면 중단한다.
- 이처럼 BSP 알고리즘의 최종 목적에 따라 맞는 분할 종료 조건을 미리 정해 둔 후, 그 조건에 도달할 때까지 공간을 재귀적으로 이등분하는 과정이다.
구현
레벨 디자인 - 텍스트 게임
- 로그라이크 게임의 경우, 매번 새로운 맵을 생성하기도 한다. 그 때 BSP 알고리즘을 응용할 수 있다. 이번에는 cpp로 텍스트로 이루어진 맵을 만들 것이다.
- 분할 정복을 하고 방을 이어붙이는 BSP 알고리즘을 간단히 만든 예시이다. 엄밀하게는 조금 다르지만, 이진 방식으로 공간을 나눈다는 점에서 비슷하다고 볼 수 있다. 흔히 BSP 던전 생성 알고리즘이라고 하는 기법이다.
-
공간을 둘로 분할한다. 분할 종료 조건을 정하고 실행한다.
- 이번에는 랜덤으로 가로로 할지 세로로 할지, 분할 비율을 어디에 더 크게 할지를 정한다. 너무 한쪽으로만 분할되지 않도록 조건을 추가하였다.
if (rLen / cLen > 1 || (cLen / rLen <= 1 && rand() % 2)) { int divideNum = (r2 - r1) * (rand() % 3 + 4) / 10; // 랜덤비율설정 ... }
- 이번에는 랜덤으로 가로로 할지 세로로 할지, 분할 비율을 어디에 더 크게 할지를 정한다. 너무 한쪽으로만 분할되지 않도록 조건을 추가하였다.
-
분할이 끝나면 방을 만든다.
- 분할된 공간은 1을 넣어 방으로 표시한다. 후에 길을 추가하기 위해 전체 직사각형 각 변에서 2씩 빼어 공간을 나눈다.
if (depth == 0 || (r2 - r1 <= 10 || c2 - c1 <= 10)) { for (int i = r1 + 2; i < r2 - 2; ++i) { for (int j = c1 + 2; j < c2 - 2; ++j) { Dungeon[i][j] = 1; } } return {r1 + 2, c1 + 2, r2 - 3, c2 - 3, r1 + 2, c1 + 2, r2 - 3, c2 - 3 }; }
- 분할된 공간은 1을 넣어 방으로 표시한다. 후에 길을 추가하기 위해 전체 직사각형 각 변에서 2씩 빼어 공간을 나눈다.
-
분할된 방 사이에 길을 만든다.
- 재귀를 통해 방을 연결한다.
... Dungeon[temp1.r4 + 1][(temp1.c3 + temp1.c4) / 2] = 4; Dungeon[temp1.r4 + 2][(temp1.c3 + temp1.c4) / 2] = 4; Dungeon[temp2.r1 - 1][(temp2.c1 + temp2.c2) / 2] = 4; Dungeon[temp2.r1 - 2][(temp2.c1 + temp2.c2) / 2] = 4; int rmin = min((temp1.c3 + temp1.c4) / 2,(temp2.c1 + temp2.c2) / 2); int rmax = max((temp1.c3 + temp1.c4) / 2, (temp2.c1 + temp2.c2) / 2); for (int i = rmin; i <= rmax; ++i) { Dungeon[temp2.r1 - 2][i] = 4; } ...
- 재귀를 통해 방을 연결한다.
-
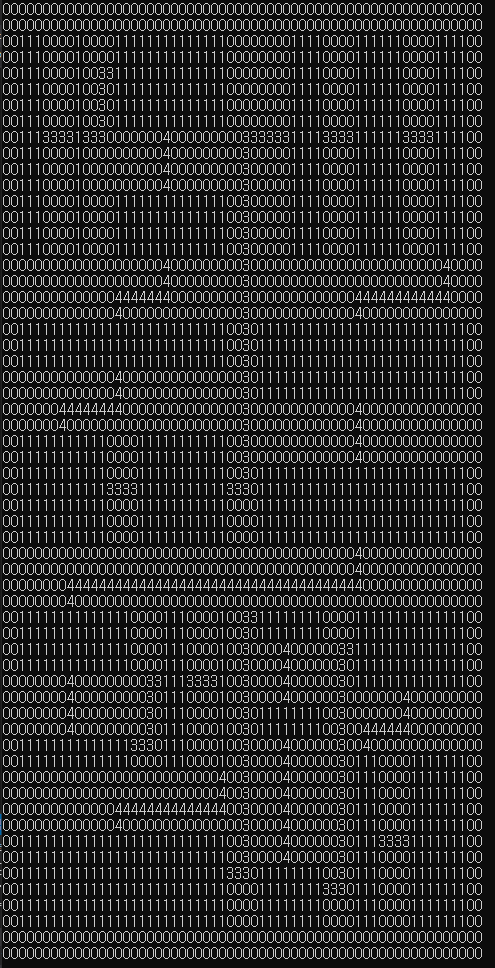
전체 코드와 결과
#include<stdio.h> #include<iostream> #include<algorithm> #include<string> #include<string.h> #include<math.h> using namespace std; #define DungeonSize 60 int dungeon[DungeonSize][DungeonSize]; //1.분할한다. //2. 분할이 끝나면 방을 만든다. //3. 방을 연결한다. typedef struct DungeonLocation { int r1, c1, r2, c2; int r3, c3, r4, c4; }; DungeonLocation DivideDungeon(int depth, int r1, int c1, int r2, int c2) { DungeonLocation location; //2. 방을 만든다. if (depth ==0 || (r2 - r1 <= 10 || c2 - c1 <= 10)) { for (int i = r1 + 2; i < r2 - 2; ++i) { for (int j = c1 + 2; j < c2 - 2; ++j) { dungeon[i][j] = 1; } } return { r1 + 2, c1 + 2, r2 - 3, c2 - 3, r1 + 2, c1 + 2, r2 - 3, c2 - 3 }; } //1. 분할한다 //3. 방을 합친다. int rLen = r2 - r1; int cLen = c2 - c1; DungeonLocation temp1, temp2; if (rLen/cLen > 1 ||(cLen/rLen <= 1 && rand() % 2)) { // 세로분할 int divideNum = (r2 - r1) * (rand() % 3 + 4) / 10; //방 분할 temp1 = DivideDungeon(depth - 1, r1, c1, r1 + divideNum, c2); temp2 = DivideDungeon(depth - 1, r1 + divideNum, c1, r2, c2); //방합치기. dungeon[temp1.r4 + 1][(temp1.c3 + temp1.c4) / 2] = 4; dungeon[temp1.r4 + 2][(temp1.c3 + temp1.c4) / 2] = 4; dungeon[temp2.r1 - 1][(temp2.c1 + temp2.c2) / 2] = 4; dungeon[temp2.r1 - 2][(temp2.c1 + temp2.c2) / 2] = 4; int rmin = min((temp1.c3 + temp1.c4) / 2,(temp2.c1 + temp2.c2) / 2); int rmax = max((temp1.c3 + temp1.c4) / 2, (temp2.c1 + temp2.c2) / 2); for (int i = rmin; i <= rmax; ++i) { dungeon[temp2.r1 - 2][i] = 4; } } else {// 가로분할 int divideNum = (c2 - c1) * (rand() % 3 + 4) / 10; //방분할 temp1 = DivideDungeon(depth - 1, r1, c1, r2, c1 + divideNum); temp2 = DivideDungeon(depth - 1, r1, c1 + divideNum, r2, c2); //방합치기 dungeon[(temp1.r3 + temp1.r4) / 2][temp1.c4 + 1] = 3; dungeon[(temp1.r3 + temp1.r4) / 2][temp1.c4 + 2] = 3; dungeon[(temp2.r1 + temp2.r2) / 2][temp2.c1 - 1] = 3; dungeon[(temp2.r1 + temp2.r2) / 2][temp2.c1 - 2] = 3; int rmin = min((temp1.r3 + temp1.r4) / 2, (temp2.r1 + temp2.r2) / 2); int rmax = max((temp1.r3 + temp1.r4) / 2, (temp2.r1 + temp2.r2) / 2); for (int i = rmin; i <= rmax; i++) { dungeon[i][temp2.c1-2] = 3; } } location.r1 = temp1.r1; location.r2 = temp1.r2; location.r3 = temp2.r3; location.r4 = temp2.r4; location.c1 = temp1.c1; location.c2 = temp1.c2; location.c3 = temp2.c3; location.c4 = temp2.c4; return location; } void CreateDungeon() { memset(dungeon, 0, sizeof(dungeon)); DivideDungeon(5, 0, 0, DungeonSize, DungeonSize); } void PrintDungeon() { for (int i = 0; i < DungeonSize; ++i) { for (int j = 0; j < DungeonSize; ++j) { printf("%d", dungeon[i][j]); } printf("\n"); } } int main(void) { CreateDungeon(); PrintDungeon(); } [출처] BSP(Binary Space Partitioning)알고리즘을 응용해 로그라이크류 게임 방만들기|작성자 jh20s