I2C는 1982년 Philips Semiconductir에서 개발한 통신버스 프로토콜이다.
비교적 느리지만 단순성, 견고성으로 인해 널리 사용됨.
I2C 통신 구성
- 마스터와 슬레이브로 나뉨
- 하ㅏㄴ의 마스터에 다수의 슬레이브가 연결될 수 있음
-구별을 위해 각 슬레이브마다 고유한 주소값을 가짐
-슬레이브의 주소값을 이용해 마스터는 한번에 하나의 슬레이브와 통신 수행
| 장점 | 단점 |
|---|---|
| 1.2개의 입출력핀을 이용한 반 이중통신 | 데이터 전송 센서가 비교적 저속 모드 |
| 2동작중에도 I2C통신버스에 새 장치 추가 및 제거 가능 | 반 이중 통신으로 마스터와 슬레이브가 동시에 데이터 전송 불가 |
| 슬레이브의 주소값이 7bit로 최대 128개까지 연결 가능 |
STM32 I2C 버스
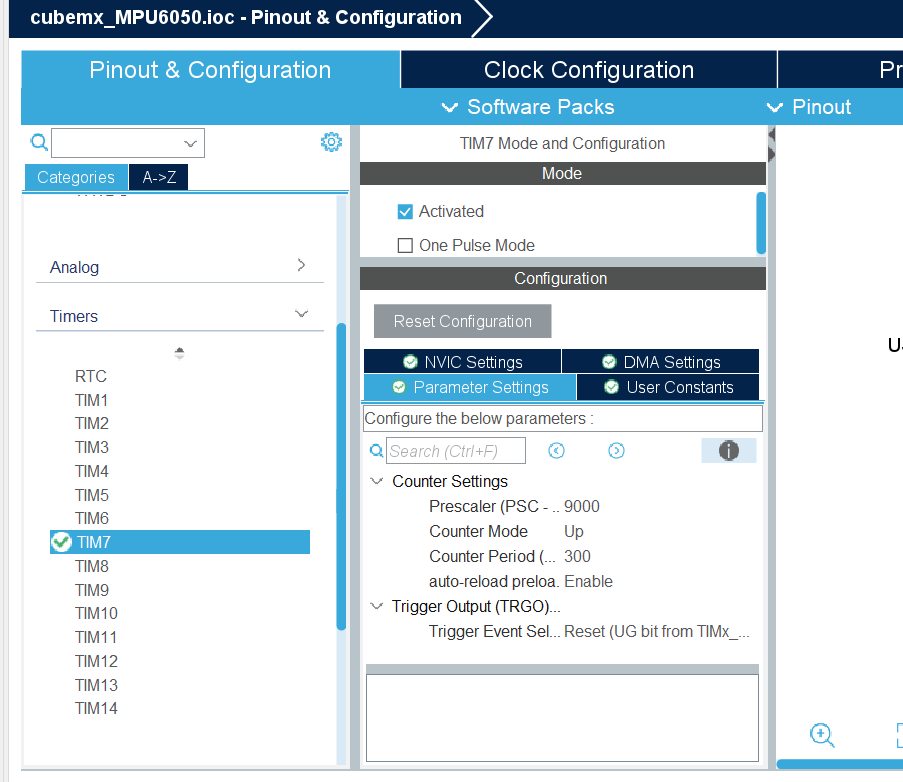
타이머 설정
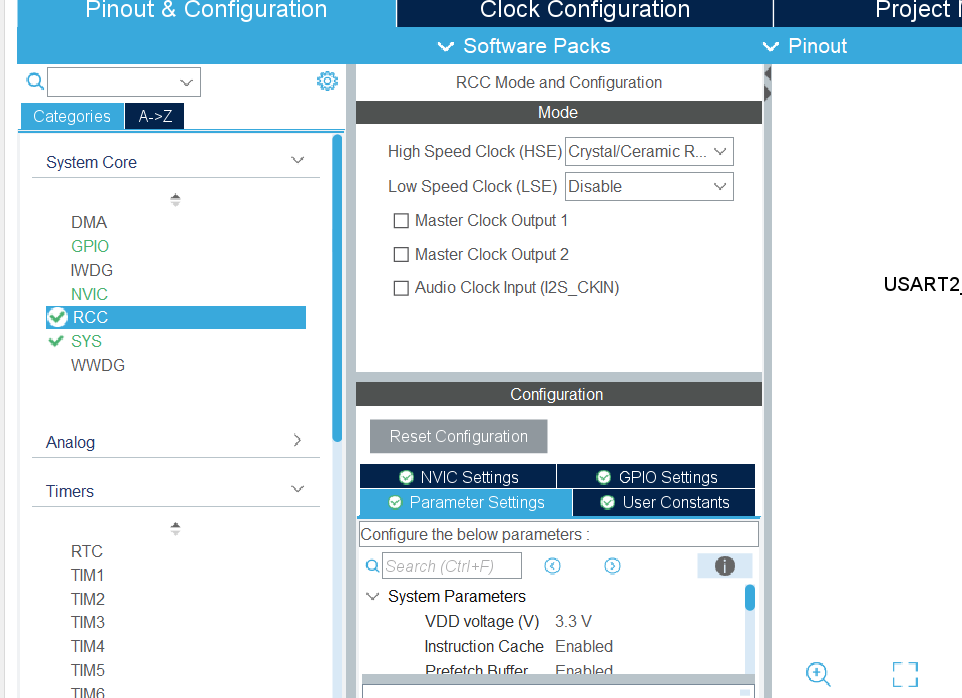
RCC 설정
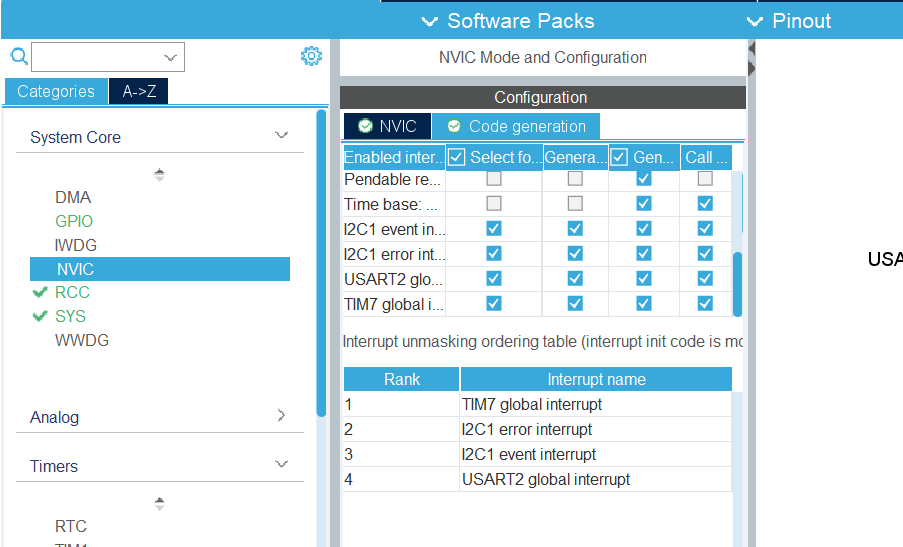
NVIC 설정
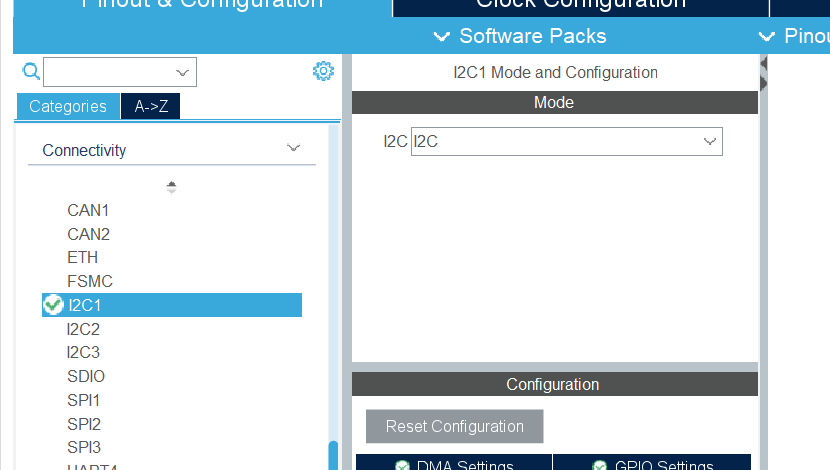
I2C
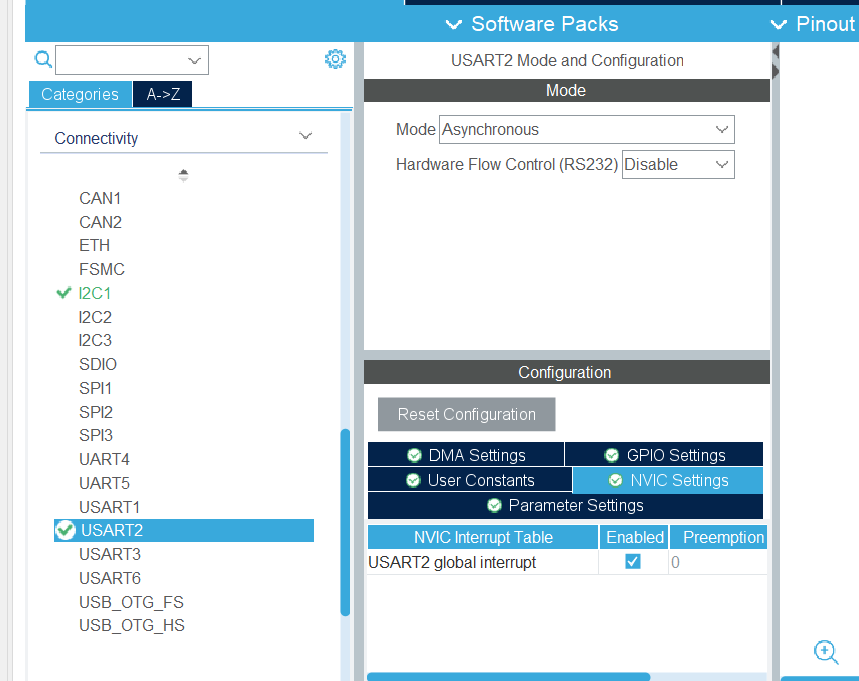
USART2
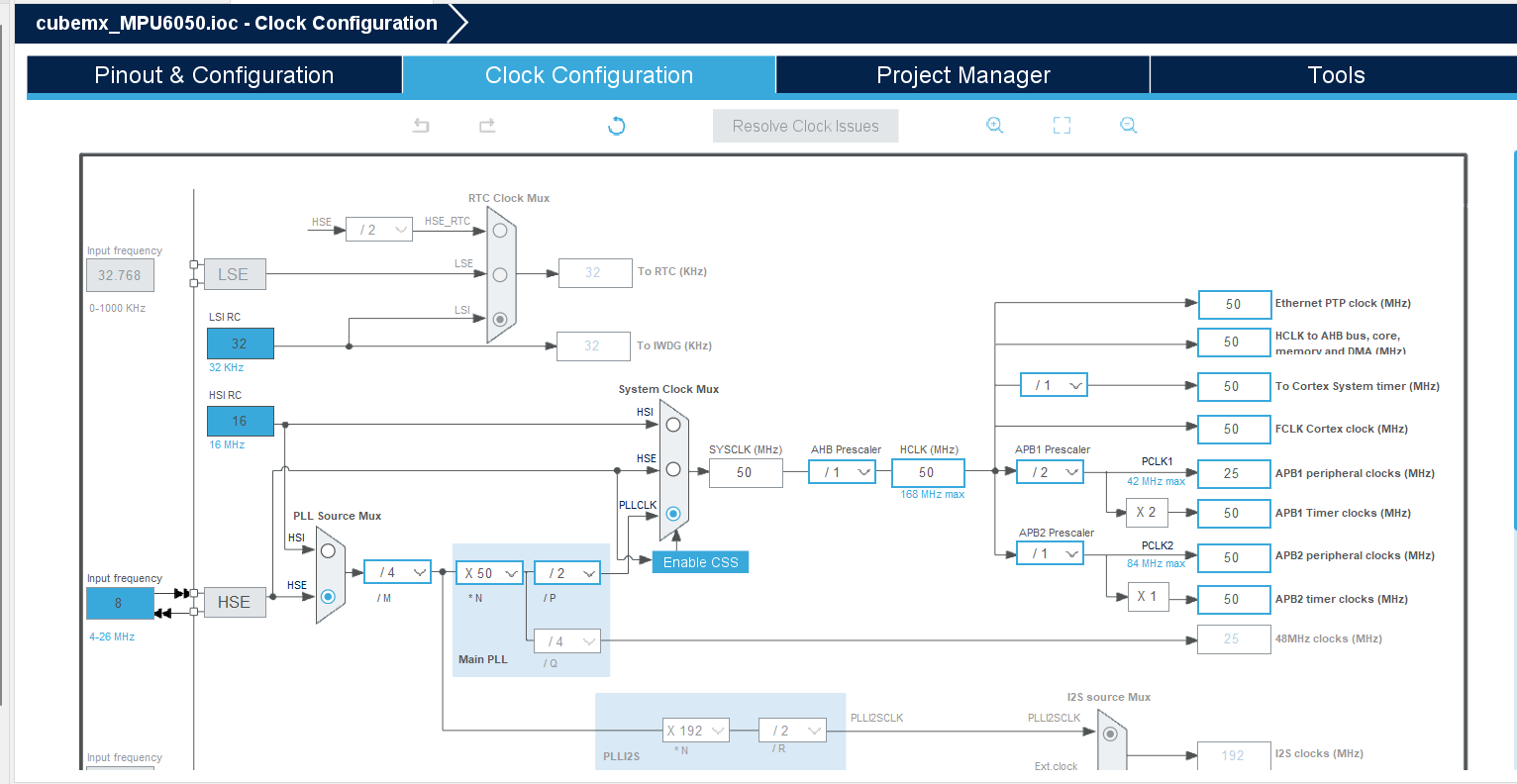
Clock configuration
main.c code
코드를 입력/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "i2c.h"
#include "MPU9250_2.h"
#include "mpu9250.h"
#include <stdio.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
TIM_HandleTypeDef htim7;
UART_HandleTypeDef huart2;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_TIM7_Init(void);
static void MX_USART2_UART_Init(void);
static void MX_NVIC_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_TIM7_Init();
MX_USART2_UART_Init();
/* Initialize interrupts */
MX_NVIC_Init();
/* USER CODE BEGIN 2 */
MPU9250_t mpu9250;
MPU9250_Init(&hi2c1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
MPU9250_Read_All(&hi2c1, &mpu9250);
HAL_Delay(500);
printf("pitch: %lf roll: %lf yaw: %lf \r\n", mpu9250.KalmanAngleX, mpu9250.KalmanAngleY, mpu9250.KalmanAngleZ);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 50;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief NVIC Configuration.
* @retval None
*/
static void MX_NVIC_Init(void)
{
/* TIM7_IRQn interrupt configuration */
HAL_NVIC_SetPriority(TIM7_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM7_IRQn);
/* I2C1_ER_IRQn interrupt configuration */
HAL_NVIC_SetPriority(I2C1_ER_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(I2C1_ER_IRQn);
/* I2C1_EV_IRQn interrupt configuration */
HAL_NVIC_SetPriority(I2C1_EV_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(I2C1_EV_IRQn);
/* USART2_IRQn interrupt configuration */
HAL_NVIC_SetPriority(USART2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART2_IRQn);
}
/**
* @brief I2C1 Initialization Function
* @param None
* @retval None
*/
/**
* @brief TIM7 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM7_Init(void)
{
/* USER CODE BEGIN TIM7_Init 0 */
/* USER CODE END TIM7_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM7_Init 1 */
/* USER CODE END TIM7_Init 1 */
htim7.Instance = TIM7;
htim7.Init.Prescaler = 9000;
htim7.Init.CounterMode = TIM_COUNTERMODE_UP;
htim7.Init.Period = 300;
htim7.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim7) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim7, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM7_Init 2 */
/* USER CODE END TIM7_Init 2 */
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim == &htim7) {
HAL_GPIO_TogglePin(GPIOD, GPIO_PIN_13);
}
}
int __io_putchar (int ch)
{
(void)HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 100);
return ch;
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */하세요핀 연결
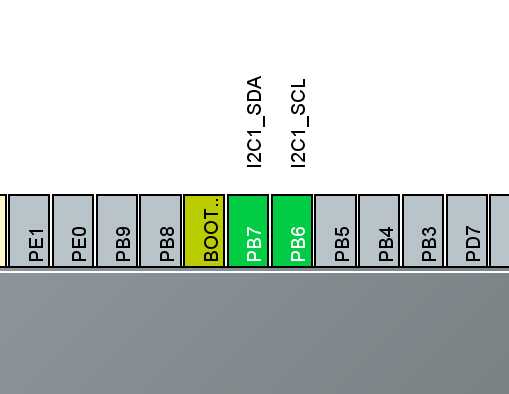
SDA -> PB7
SCL -> PB6
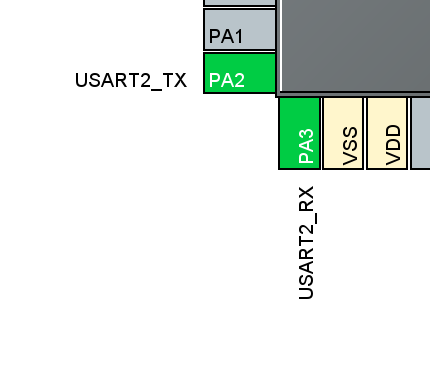
RX -> PA2
TX -> PA3
- SCL(Serial Clock) : 통신의 동기를 맞추기 위한 클럭 신호를 마스터에서 슬레이브로 전송함.
- SDA(Serial Data) : SCL의 클럭 신호에 맞춰 마스터와 슬레이브 간에 데이터를 송수신함.
TX(Transmit)와 RX(Receive)를 반대로 연결하는 이유
데이터 전송 방향에 따른 신호 흐름을 맞추기 위해서
-
TX와 RX의 역할:
TX (Transmit): 데이터 송신을 담당하는 핀으로, 데이터를 외부로 보내는 역할을 함
RX (Receive): 데이터 수신을 담당하는 핀으로, 외부에서 들어오는 데이터를 받는 역할을 함 -
반대 연결의 이유:
TX는 데이터를 송신, RX핀은 데이터를 수신함. 그러나 두 장치가 서로 통신하기 위해서는 한 장치의 TX에서 보내는 데이터가 상대방의 RX에, 상대방의 TX에서 보내는 데이터가 RX로 들어와야 하기 때문. 이를 크로스 연결이라고도 한다.
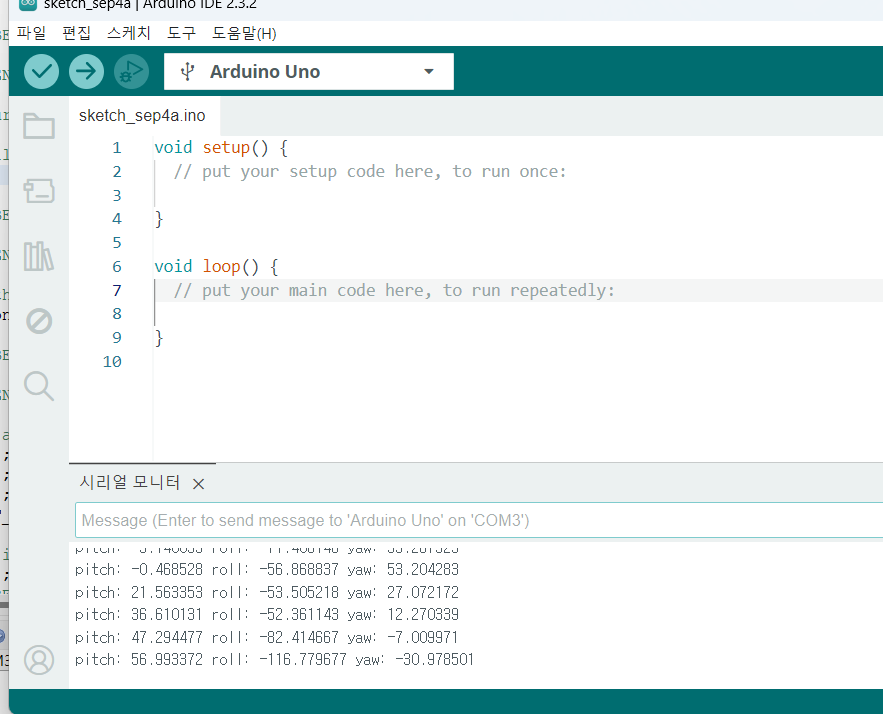
결과
pitch, roll,yaw 값이 도출되는것을 확인함.

d