Unity Robotics는 Unity 버전 2020.2+부터는 문제없이 사용된다고 한다.
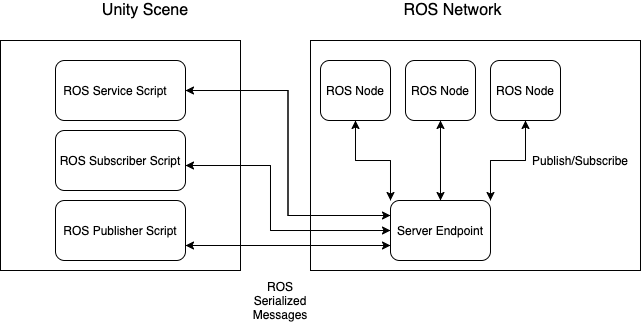
통신 과정은 Unity에서 Script를 통해서 ROS와 TCP 통신을 하여 ROS 서버에서 토픽을 발생시킨다.
Unity Setting
ROS-TCP-Connector
Unity에서 ROS-TCP-Connector plugin을 추가하여 Unity에 ROS 설정이 가능하게 해야 한다.
설치가 완료되면 다음과 같이 Robotics 탭이 생겨난다.
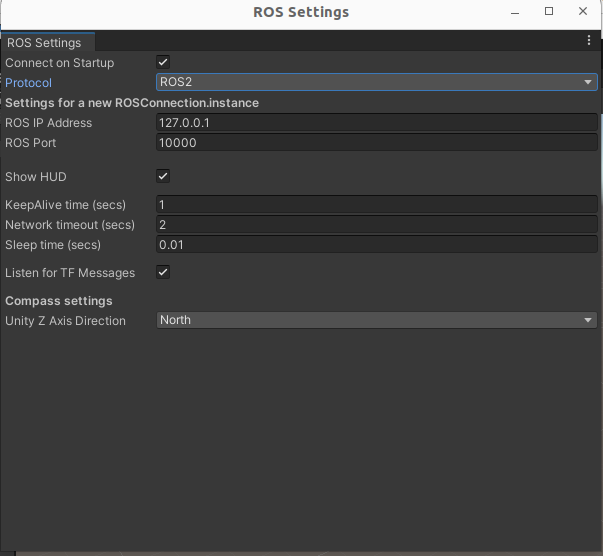
ROS Setting에 들어가면 아래와 같이 IP 입력과 Port 설정 등이 가능하다.
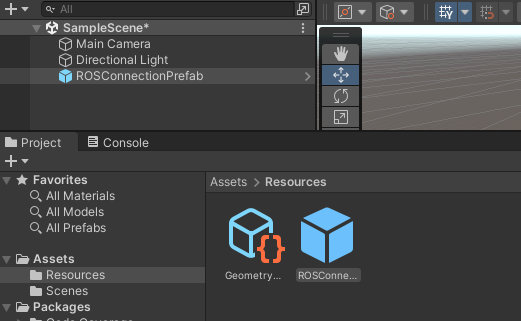
[Assets/Resources] 부분에 보면 ROSConnectionPrefab이 존재할텐데, 해당 prefab을 Scene에 추가해야 한다. 그럼 ROS와 TCP 통신을 진행한다.

ROS1, ROS2 모두 선택이 가능하다.
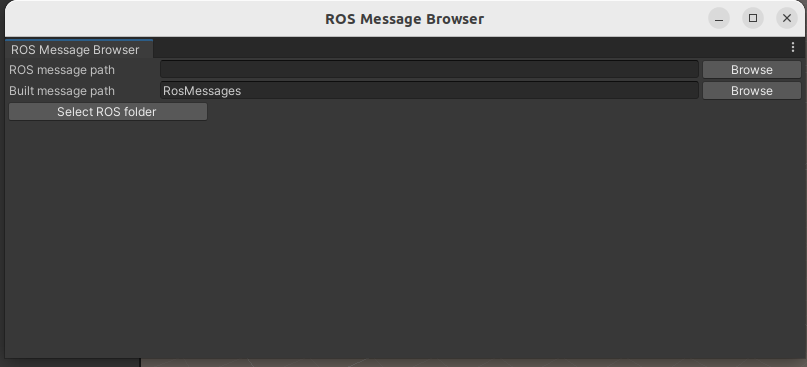
이번엔 [Generate ROS Messages]를 들어가면 ROS와 주고받을 Message를 Import하면 된다.
(ROS message path 부분)
URDF Importer
Unity에서 로봇 생성을 위해서 URDF 파일 import 또한 가능하다.
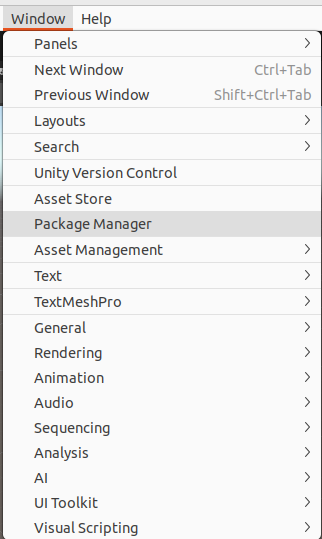
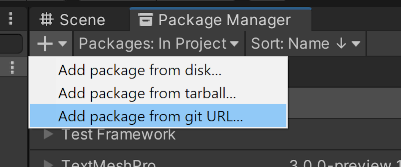
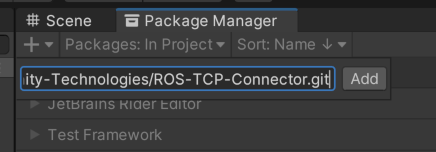
위에서와 마찬가지로 [Package Manager]에 들어가서 add git URL로 아래 링크를 넣어주면 된다.
URL : https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer
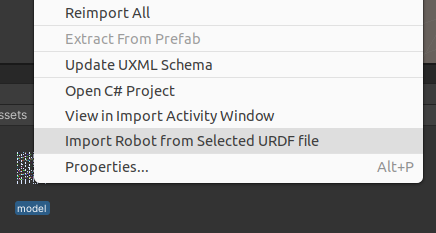
그런다음 [Assets]에 URDF 파일을 넣어주고, 우클릭하여 URDF 파일을 Import 할 수 있다.
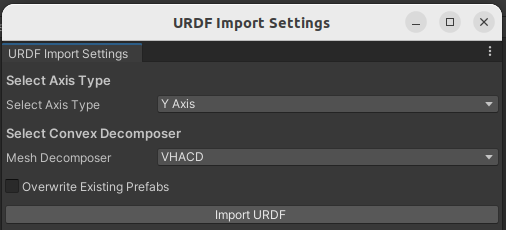
세팅을 맞쳐주고 Import URDF를 하면 된다.
Visualizations
마지막으로 [Package Managet]에서 아래 링크를 추가하면 Unity에서의 Setting은 끝난다.
URL : https://github.com/Unity-Technologies/ROS-TCP-Connector.git?path=/com.unity.robotics.visualizations
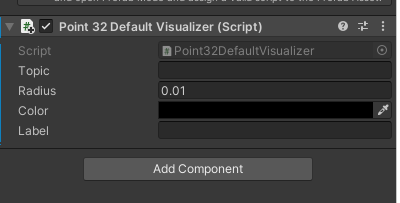
그리고 Component를 추가해서 보고 싶은 Visualizer Topic을 선택해주면 된다.
자세한 사용 방법은 다른 Section에서 설명하겠다.
