
다익스트라 알고리즘이란?
다익스트라(Dijkstra)는 한 정점(시작 정점)에서 부터 모든 정점까지의 최단 거리를 각각 구하는 알고리즘이다.
이 때 그래프는 음의 간선을 포함하지 않아야 한다.
다익스트라 알고리즘은 다이나믹 프로그래밍, 그리디 알고리즘 기법을 사용한 알고리즘이라고 볼 수 있다.
그 이유는 다익스트라의 기본적인 메커니즘을 보면 알 수 있다.
각 정점을 노드, 간선간의 거리를 비용이라 하자.
방문하지 않은 노드 중에서 가장 비용이 적은 노드를 선택한다. -> 그리디 알고리즘
해당 노드로부터 갈 수 있는 노드들의 비용을 갱신한다. -> 다이나믹 프로그래밍
기본적인 매커니즘은 알아봤으므로 이제 다익스트라가 어떻게 동작하는지 본격적으로 알아보도록 하자.
다익스트라 동작 방식
정점이 6개인 그래프에서 시작 정점을 A로 설정 하고 다익스트라를 적용해보자.
각 데이터의 의미는 다음과 같다.
S : 방문한 노드들의 집합
Q : 방문하지 않은 노드들의 집합
d[N] : A -> N까지 계산된 최단 거리
INF : 확인되지 않은 거리 = 무한
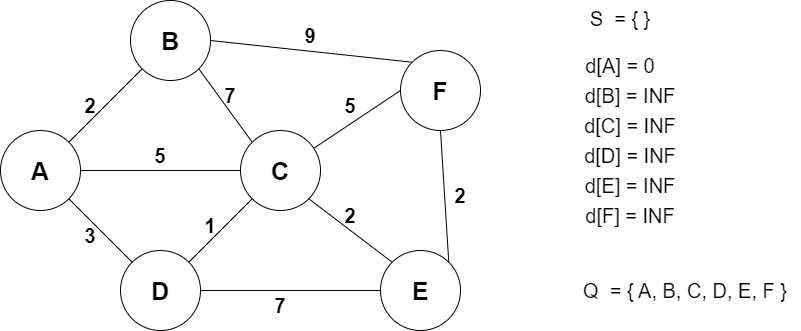
아직 방문한 노드가 없기 때문에 S는 공집합이고 Q는 모든 노드들의 집합이다.
출발지인 A에서 A까지의 거리는 0이므로 0으로 설정, 나머지 노드들까지의 거리는 확인되지 않았으므로 INF
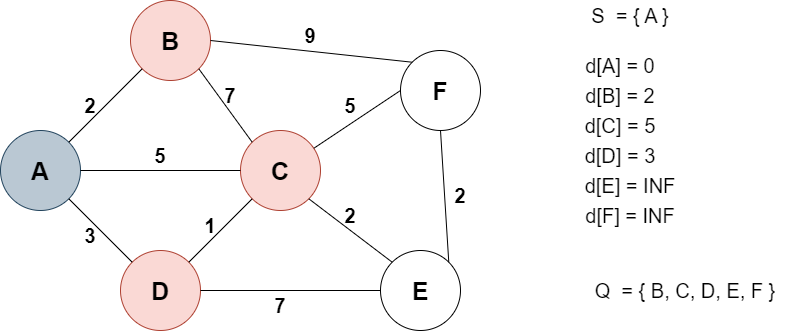
A에서 방문할 수 있는 노드는 B, C, D다.
A에서 해당 노드까지 가는 거리를 각각 기존의 거리값과 비교해 최솟값으로 업데이트 한다.
예를 들어 A에서 B까지의 거리는 2이므로 d[B]는 기존의 INF와 2중 작은 값인 2로 업데이트 된다.
인접 노드까지의 거리를 모두 업데이트 한 A는 더이상 방문할 필요가 없으므로 Q에서 제외하고 S에 추가한다.
갱신한 테이블 중 가장 거리값이 작은 노드인 B를 다음 노드로 선택한다.
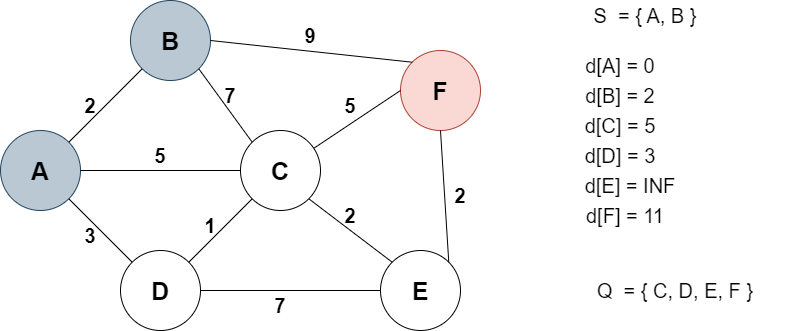
B에서 방문할 수 있는 노드는 C와 F다.
C로 갈 수 있는 경로(A->B->C)가 존재하므로 C까지의 거리값의 기존의 거리값과 비교한다.
기존의 거리값은 5, A->B->C는 9이므로 업데이트 하지 않는다.
F로 가는 거리값이 11, 기존의 거리값이 INF이므로 최소값인 11로 업데이트 한다.
B도 마찬가지로 인접한 노드까지의 거리를 모두 업데이트했으므로 Q에서 제외하고 S에 추가한다.
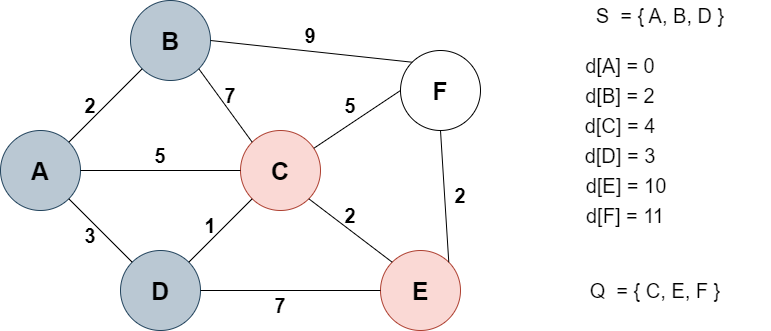
그 다음으로 거리값이 작았던 D를 다음 노드로 선택한다.
C로 가는 경로(A->D->C)의 거리값이 4로 기존의 5보다 작으므로 4로 업데이트 해준다.
E로 가는 거리값도 10으로 업데이트 해준다.
Q에서 제외, S에 추가한다.
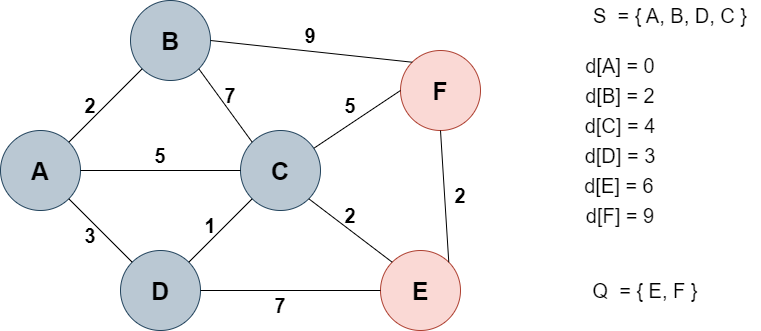
C노드를 선택했을 때 거리값 업데이트
d[E] : 10 -> 6
d[F] : 11 -> 9
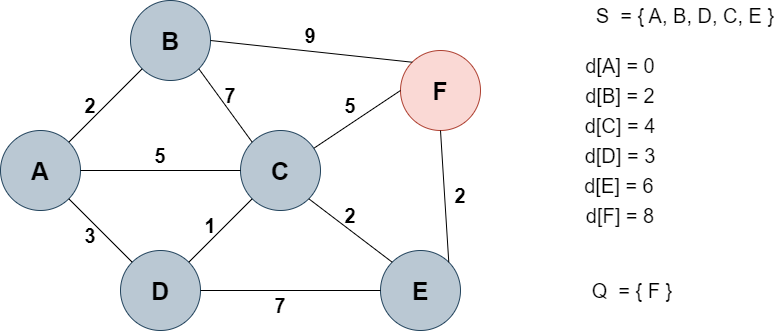
E노드를 선택했을 때 거리값 업데이트
d[F] : 9 -> 8
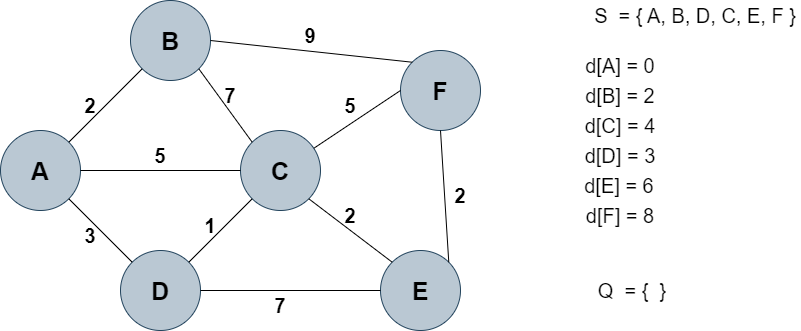
위 과정이 반복되어 Q가 공집합이 되면(= 모든 노드에 대해 거리값 계산 완료) d를 통해 각 노드까지의 최단 거리를 결정한다.
구현 방법
다익스트라 알고리즘은 크게 두가지 방식으로 구현할 수 있다.
의사코드를 보며 각 방식의 동작 원리를 이해해보자.
선형 탐색
def dijkstra_linear(graph, start):
n = len(graph)
INF = float('inf')
distance = [INF] * n
visited = [False] * n
distance[start] = 0
for _ in range(n):
# 방문하지 않은 노드 중 최단 거리 노드 찾기 (O(N))
min_dist = INF
min_node = -1
for i in range(n):
if not visited[i] and distance[i] < min_dist:
min_dist = distance[i]
min_node = i
# 선택한 노드 방문 처리
if min_node == -1:
break
visited[min_node] = True
# 인접한 노드의 거리 갱신
for neighbor, cost in graph[min_node]:
if distance[min_node] + cost < distance[neighbor]:
distance[neighbor] = distance[min_node] + cost
return distance- 모든 노드의 최단 거리 값을 무한대로 초기화
- 시작 노드의 최단 거리 값을 0으로 설정
- 방문하지 않은 노드 중 최단 거리 값이 가장 작은 노드를 선택
- 선택한 노드를 방문 처리하고, 인접한 노드들의 최단 거리를 갱신 (기존 거리보다 짧은 경로를 발견하면 업데이트)
- 모든 노드를 처리할 때까지 반복
구현이 간단하고 이해하기 쉽다는 장점이 있지만,
각 노드마다 방문하지 않은 노드 중 최솟값을 찾아야 하므로 시간복잡도가 다.
우선순위 큐
import heapq
def dijkstra_heap(graph, start):
n = len(graph)
INF = float('inf')
distance = [INF] * n
pq = [] # 우선순위 큐 (min-heap)
# 시작 노드 초기화
heapq.heappush(pq, (0, start)) # (거리, 노드)
distance[start] = 0
while pq:
dist, node = heapq.heappop(pq) # 현재 최단 거리 노드 꺼내기
if distance[node] < dist:
continue # 이미 처리된 노드이면 무시
for neighbor, cost in graph[node]:
new_dist = dist + cost
if new_dist < distance[neighbor]:
distance[neighbor] = new_dist
heapq.heappush(pq, (new_dist, neighbor))
return distance- 모든 노드의 최단 거리 값을 무한대로 초기화
- 시작 노드의 최단 거리 값을 0으로 설정하고, (0, 시작 노드)를 우선순위 큐에 삽입
- 우선순위 큐에서 최단 거리 노드를 꺼내 방문 처리
- 해당 노드의 인접 노드들을 탐색하며 최단 거리 갱신 (기존 거리보다 짧은 경로를 발견하면 우선순위 큐에 삽입)
- 큐가 빌 때까지 반복
노드의 개수가 V, 간선의 개수가 E일 때 의 연산으로 최단 거리 노드를 선택할 수 있으므로 시간복잡도가 다.
노드의 개수가 많아지면 탐색 시간이 오래 걸리는 선형 탐색을 개선하기 위해 도입된 방법이다.
따라서 대부분의 경우 우선순위 큐 방식을 사용하는 것을 권장한다.
References
[필수 알고리즘] 다익스트라 알고리즘(Dijkstra Algorithm) 이해
