📍 모터
📖 서보모터란?
- 컨트롤러(정보처리회로, CPU)의 명령에 따라 매우 정밀하게 작동하고 센서의 피드백을 받아 보다 정밀하게 회전하는 것이 특징
- 일반적으로 모터, 컨트롤러 및 센서가 포함된 간단한 조합
- 구동시스템(피드백 회로)를 구축하고있는 모터를 사용하여 위치, 속도, 가감속도를 제어시키는 경우에
서보모터라고 부른다.

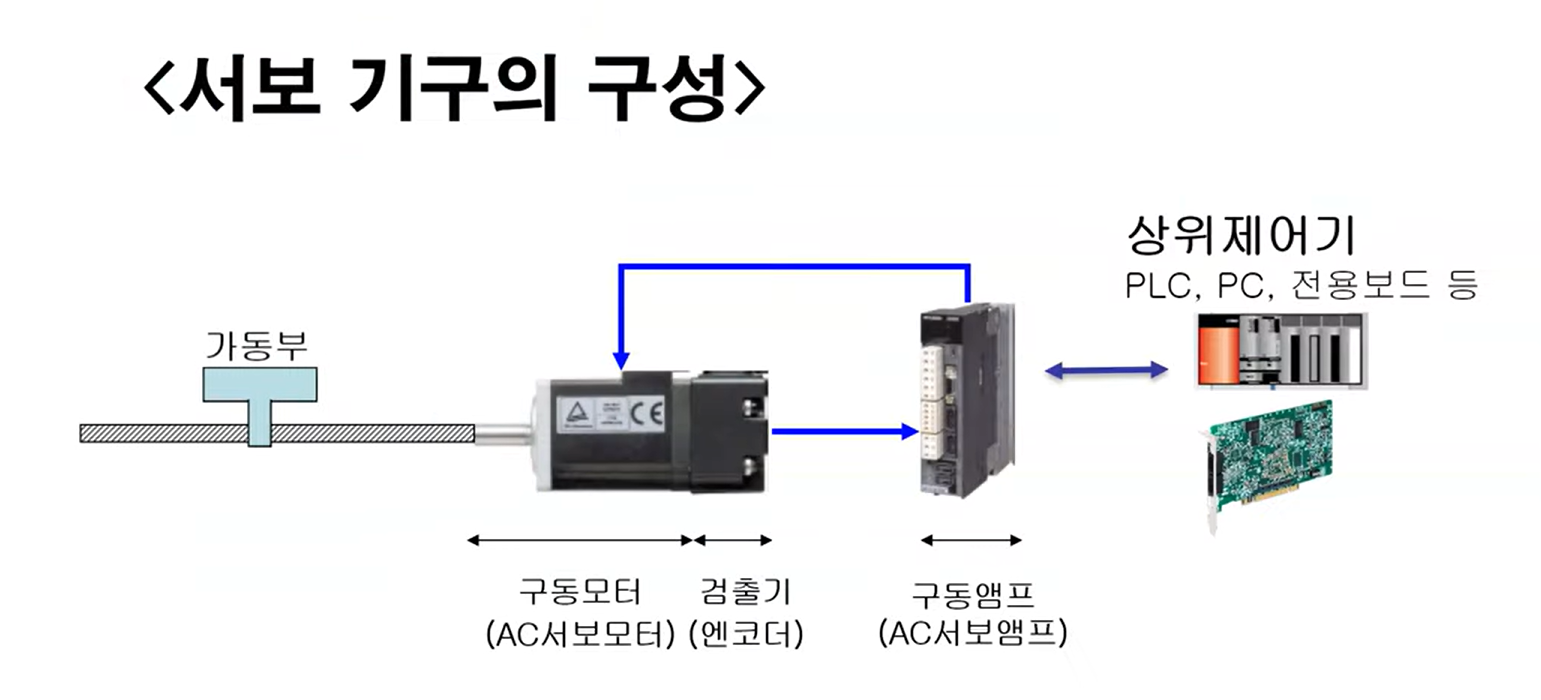
서보모터는 목표치로부터 일정 수준 벗어나게 되면, 목표치를 맞추기 위해 빠르게 정/역회전하여 제어, 그렇기때문에 일반적으로 서보모터에는 모터의 회전 각도를 정밀하게 계측해 피드백 할 수 있도록 엔코더(각도 계측 센서)가 내장
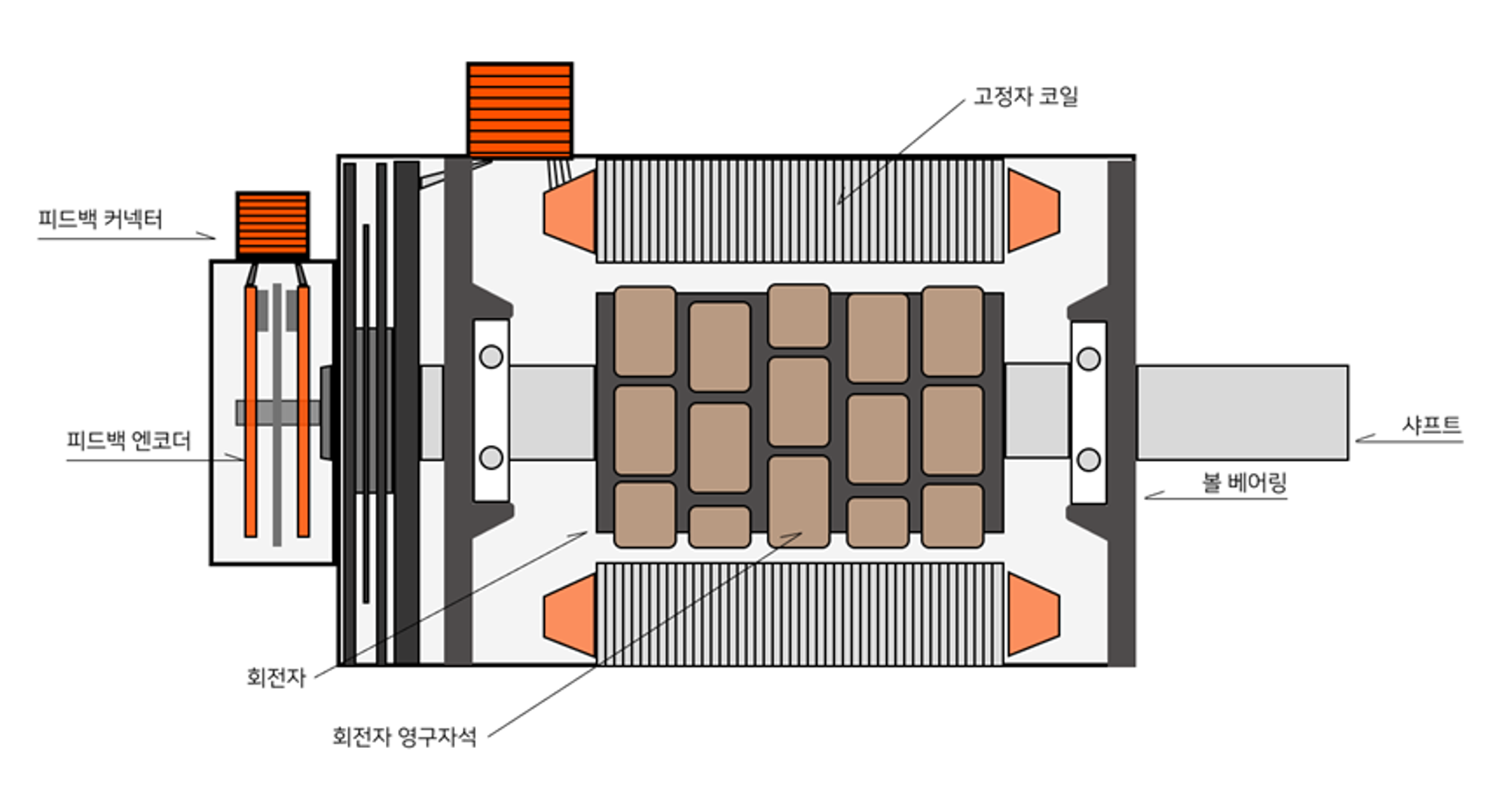
📖 서보모터 특징
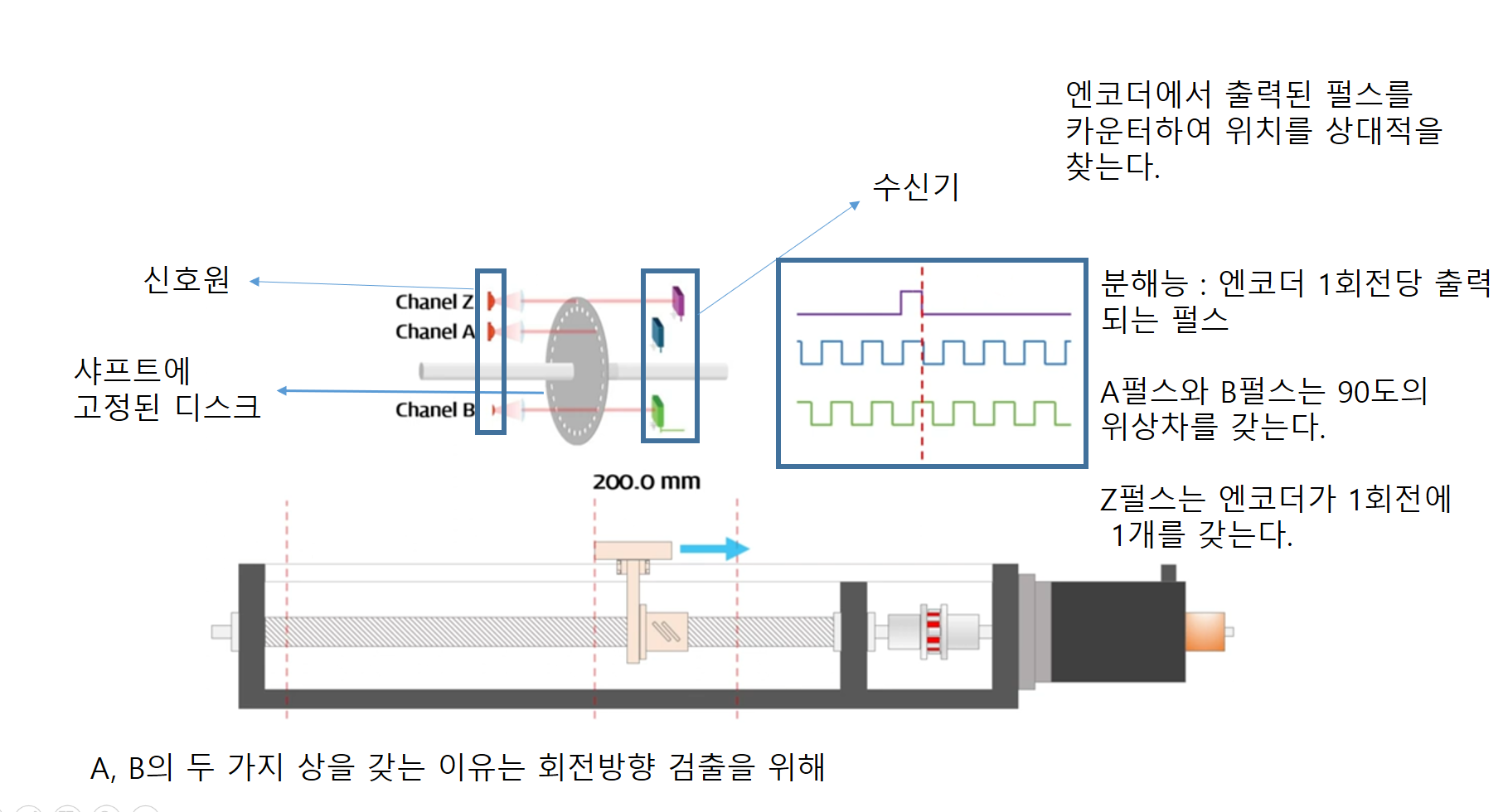
📖 위치피드백
엔코더(Encoder) 검출 특성에 따른 분류
- Incremental(Encoder)
- 절대 위치 판별 불가
- 비교적 낮은 가격
- 비교적 간단한 구조
- Absolute(Encoder)
- 절대 위치 상시 판별 가능
- 비교적 높은 가격
- 비교적 복잡한 구조
모터의 위치가 200mm 나가있는 상황에서 전원을 끄고 다시 전원을 켰을때
- Incremental : 컨트롤러에서 200mm가 움직인 상태가 아닌 0mm로 시작을 하기 때문에 전원을 끄고 다시 시작하는 경우 호밍이 필요
- Absolute : 모터의 위치가 200mm가 움직인 상태에서 전원을 끄고 다시 켰을 때 Absolute 엔코더는 항상 절대 위치 정보 출력
📖 폐회로 제어
엔코더 모터는 반드시 엔코더모터 구동드라이버에 의해 구동, 즉 폐회로(Close Looping)제어로 모터의 회전수나 위치를 제어
서보 모터 제어시스템은 토크 제어 시스템, 속도 제어 시스템 그리고 위치 제어 시스템으로 구분할 수 있고 각각의 제어는 기본적으로 Close-Loop(폐회로) 제어 구성을 가지고 있음
- 엔코더(Encoder) : 위치검출
- 모터를 원하는 수치만큼 이동시키기 위해서는 위치정보가 필요
- 컨트롤러가 실시간으로 위치정보를 피드백 받아 축이 목적지에 정확히 도착하도록 제어하는 것
순서
① 지령이 실시간으로 서보 드라이브로 전달
② 위치, 속도, 토크제어로 적절한 파워를 모터로 전달
③ 모터 가동
④ 엔코더로부터 속도와 위치에 대한 피드백이 다시 서보드라이브의 위치, 속도 제어부로 전달하여 오차를 보상
📖 서보 모터 블럭도
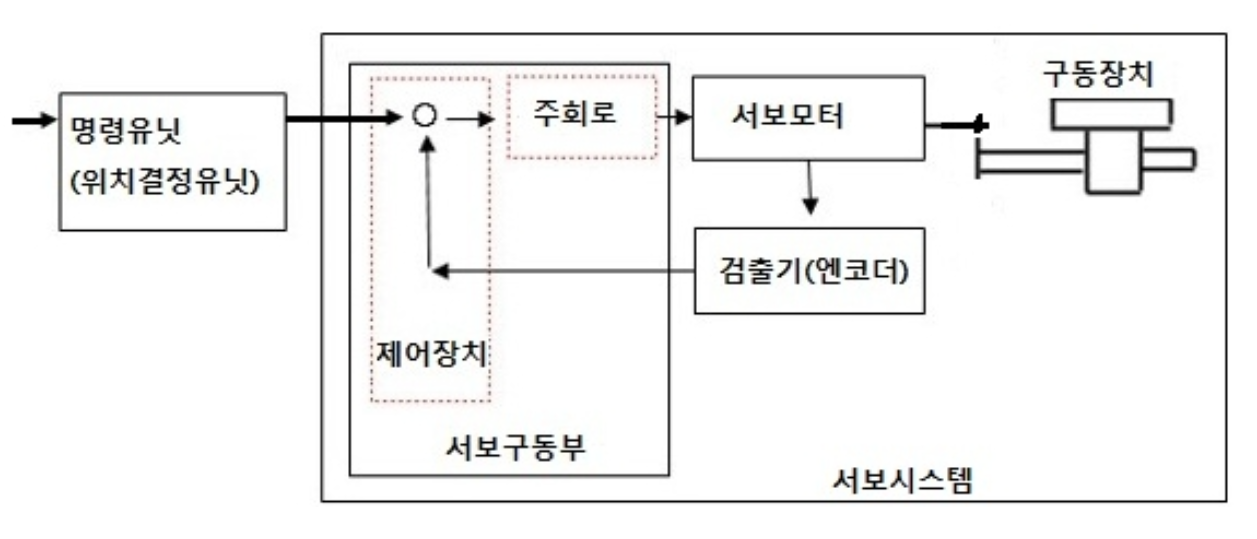
명령장치로부터 제어목표값(위치, 속도, 기타)을 지시받고 검출기를 통해서 현재값(위치, 속도, 기타)을 검출하여 목표값 대비 현재값의 차이가 항상 작게 만드는 피드백 회로
피드백 시스템 위계 : 전류(토크)제어 → 속도 제어 → 위치 제어 순
제어 방식은 회전체 시스템의 구동 환경과 용도, 목적 및 모터의 종류에 따라 사용자가 선택
📖 제어장치
- 위치제어
- 지정한 위치로 정확하게 이동/정지
- 목표 위치에서 고정밀도로 정지 시키는 것 == 위치결정
- 지령 펄스가 입력되어도 지령으로부터 다소 늦게 움직임
== 편차 카운터에는 지연분의 펄스가 누적 보관 유지되고 있는 잔류 펄스 때문!
- 속도제어
- 부하의 크기/무게가 변동해도 일정한 속도로 움직이고 싶을 때 등 상황에 맞춰 속도를 가감하는 제어
- 모터의 회전 속도를 컨트롤하여 속도를 제어
- 잔류 펄스가 속도 제어부에서 출력
- 잔류펄스가 커지면 속도 지령이 커짐
- 토크제어
- 토크 : 회전축을 돌리려고 하는 힘
- 부하의 크기가 변동해도 일정한 힘으로 움직이고 싶을 때 등 상황에 맞춰 힘을 가감하는 제어 시 사용
📖 서보모터 전류 신호
단상(220V) VS 3상(380V) 전기
가정용 전기 - 220V (단상 교류) / 점포, 공장, 사무실 등 - 380V (3상 교류)
상(Phase)이란?
전력을 만들어내는 전원을 의미
단상은 전원이 하나라는 뜻이고 3상은 전원이 3개라는 뜻
📖 전자기어비
전자기어비
- 상위 제어기(PLC, 모션 컨트롤러)와 서보 드라이브가 위치제어 시 위치지령값을 통일 시키는 약속
- 펄스(지령)당 이동거리의 비율, 또는 이동거리당 펄스(귀환)의 비율
- 서보모터가 받는 상위 mcu 펄수 주파수를 증폭 또는 감소시키는 것
- 모터의 펄스 수와 기계의 최소이동거리와 일치
- 상위장치의 지령펄스 값과 서보모터 회전시 발생되는 엔코드의 피드백 펄스값이 서로 다른것을 일치시키기위한 기능
📖 리니어 스테이지
물체를 단일 모션 축으로 제한하는 데 사용되는 정밀 모션 시스템의 구성요소
스테이지(stage)란?
초기 위치에서 어떠한 위치로 이동을 시켜주는 장치그중 직선 방향으로 움직이는 stage == 리니어 스테이지
리니어는 선형이라는 뜻이다. 리니어는 모터를 뚝 잘라 펼쳐놓은 형태를 취한다. 따라서 리니어의 구조 역시 모터의 구조와 크게 다르지 않다. 리니어 모터는 원형으로 움직이는 일반 모터와 달리 직선으로 움직인다.
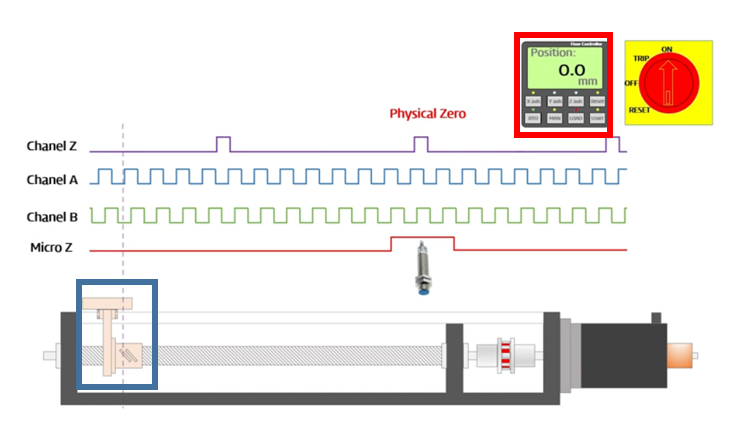
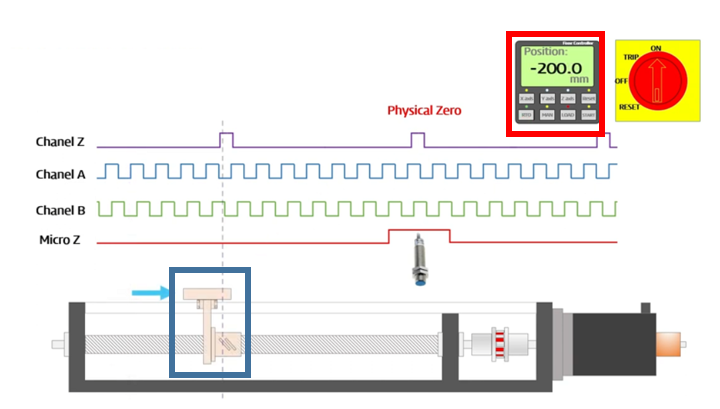
📖 원점복귀
- Increamental 엔코더의 위치검출
- Increamental 엔코더의 호밍
- 전원을 켰을 때는 현재 포지션이 0이기 때문에 호밍을 진행하면 움직이면서 홈센서를 찾게된다. 이때 모터 위치에 따라서 포지션도 함게 변화
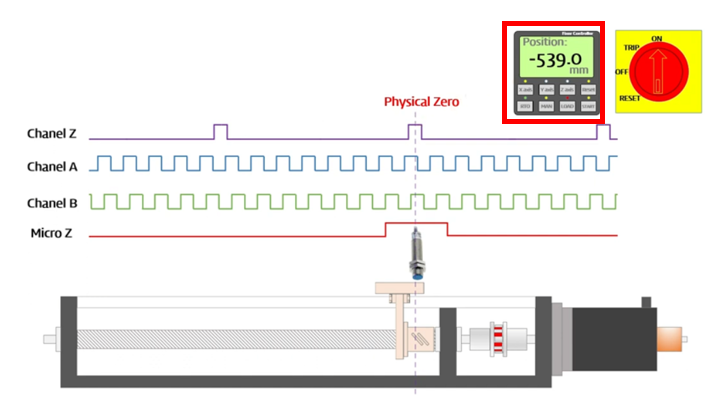
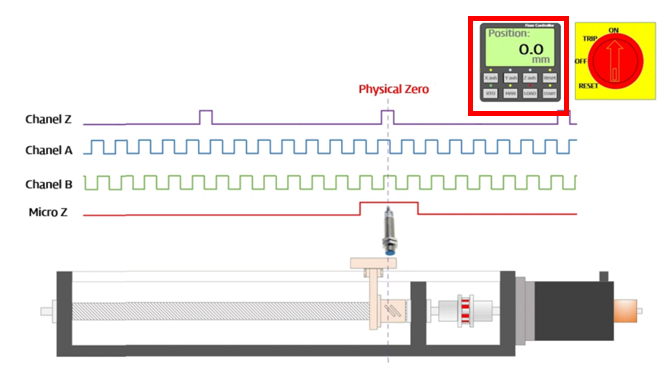
홈센서를 감지하고 첫번째의 Z펄스가 ON이 되면 현재 있는 위치를 원점으로 인식
- 전원을 켰을 때는 현재 포지션이 0이기 때문에 호밍을 진행하면 움직이면서 홈센서를 찾게된다. 이때 모터 위치에 따라서 포지션도 함게 변화