📍 Closed Loop 제어시스템
출력 신호가 제어 동작에 직접적인 영향을 받는 시스템이다.
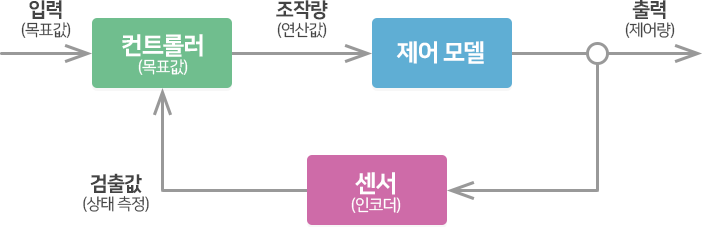
입력 신호와 피드백 신호의 차이가 오차 제어 동작 신호이며, 이 신호가 제어기에 전달되어 오차를 감소하고 최종적으로는 시스템의 출력을 요구하는 수치에 도달하도록 하는 것이다.
Closed Loop 시스템은 입력과 출력 간의 관계를 설정한 후, 실제 출력을 측정하여 목표와 비교하는 피드백을 사용한다. 피드백을 통해 시스템의 동작을 측정하고 분석하여 오차를 보정하고 목표에 가까워지도록 조절한다. 이러한 시스템은 주로 정확성과 안정성이 요구되는 작업에 사용된다.
📖 Closed Loop 구성요소
① 피드백 센서(Feedback sensor) : 제어 대상 시스템의 상태를 감지하는 센서가 있다. 이 센서는 시스템의 출력이나 상태를 측정하여 실제 상태를 확인한다.
② 비교기(Comparator) : 측정된 상태와 원하는 목표 상태(설정값)를 비교하여 오차를 계산하는 장치
③ 제어기(Controller) : 오차를 기반으로 시스템의 출력을 조정하여 원하는 목표 상태에 접근하게 만드는 제어 알고리즘이나 시스템이다.
④ 작동 장치(Actuator) : 제어기의 출력을 받아 실제로 시스템을 제어하거나 조정하는 장치이다.
⑤ 피드백 루프(Feedback Loop) : 제어 대상 시스템의 출력이 피드백 센서를 통해 다시 제어기로 돌아오는 루프 구조를 말한다. 이 과정에서 실제 출력과 목표 출력 간의 오차를 줄이기 위해 제어기가 조정된다.
📖 장점
- 외부 환경의 변화에 유연하게 대응할 수 있다.
- 오차 보정이 가능하고 정확성을 향상시킬 수 있다.
📖 단점
- 구현이 복잡하고 비용이 많이 든다.
- Open Loop 시스템에 비해 반응속도가 느리다.
Open Loop System입력과 출력 간의 관계(전달함수)를 설정한 후, 출력이 실제로 원하는 목표에 도달했는지 확인하지 않고 일련의 명령을 실행.(Non-Feedback 구조)
빠른 속도로 명령을 실행할 수 있고 주로 간단한 작업에 사용된다.
