📌 Euler Transforms
오일러 트랜스폼에는 문제가 존재한다. 이 문제가 무엇이고 이를 개선시킨 방안인 Quaternions에 대해 살펴보자.
Euler Transforms이란?
오일러 앵글로 회전을 할 때는 x,y,z 축을 기준으로 회전을 했다. 그런데 만약 임의의 축을 기준으로 회전하고 싶으면 어떻게 할까?

The order of rotation
오일러 회전은 순서가 굉장히 중요했다! 명시적으로 어떤 순서로 회전을 할 것인지 설정을 해주었어야 했다.
아래 사진처럼 회전 순서를 바꾸면 결과가 완전히 달라지게 된다.

Keyframe Animation
오일러 회전의 문제에 대해 알기 위해 Keyframe Animation을 살펴보고자 한다.
✔ Keyframe Animation in 2D
- 보통 키프레임 몇 개를 그리고 그 사이의 보간은 interpolation을 통해 컴퓨터가 만들어낸다.
✔ Keyframe Animation in 3D
-
Sampling between keyframes.
-
샘플링하여 보간된 데이터를 얻어와 사이의 애니메이션을 생성한다

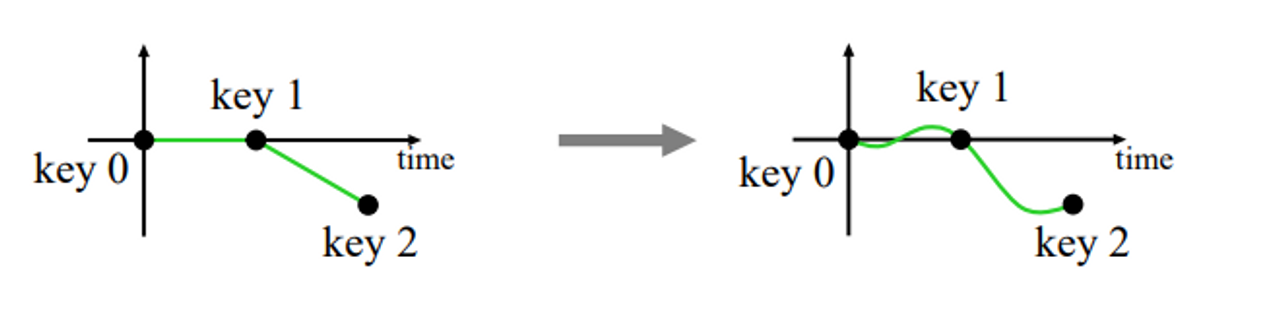
Animation smoothing
- 키프레임사이의 각지게 만들면 어색할 수 있다. 여러번 샘플링할 수 도 있겠지만 스무딩 알고리즘을 통해 자연스럽게 할 수 있다.
→ higher-order interpolation
Euler angle 의 문제점
Euler angles is intuitive and easy to use!
하지만! 두개의 서로 다른 Euler Rotation을 인터폴레이션을 할 때 생각보다 스무스하게 되지 않는다
→ 뭔가 미묘하게 정확히 인터폴레이션 같지 않게 나타난다
💡 왜 이런 문제가 발생할까?
Euler rotation 은 물체가 특정 축을 기준으로 회전을 하는 것이다.
✔ 오일러 트랜스폼의 문제 1
-
Euler angle rotates object only along the axis.
-
(60, 30, 45) 회전하며 축이 꼬이게 된다.
→ x y z가 모두 한번에 회전하게 된다.- 각도에 대한 보간이 서로 똑같은 인터벌을 가지는 회전으로 나타나지 않는다
⇒ 이런 특성으로 우리가 원하는 형태로 움직이지 않는다
- 각도에 대한 보간이 서로 똑같은 인터벌을 가지는 회전으로 나타나지 않는다
✔ 오일러 트랜스폼의 문제 2
회전 축 두개가 겹치면서 한 축에 대한 회전을 구현할 수 없는 상태가 되어버린다. gimbal lock이 발생하면 DoF를 잃는다.
→ 이를 해결하기 위해 예전에는 90도 회전을 막고 89도 회전을 시키기도 했다.
📌 Quaternion
A quaternion is an extended complex number.
Gimbal lock의 해결책
- Quaternions are more compact, efficient, and numerically stable compared to Euler Rotation
오일러 회전에 비해 장점들이 많지만- However, quaternions look more complex and difficult to understand
이해하기 어렵고 복잡하다- 연속으로 다른 쿼터니언으로 회전을 시킬 때 손쉽게 합칠 수 있다.
-
- q_v : vector part (imaginary part) 허수부

- q_w : the scalar part (real part) 실수부

- q_v : vector part (imaginary part) 허수부
✔ Hamilton Product
두개의 Quaternion p와 q의 product

✔ Conjugation of the quaternion
✔ Unit Quaternion
- The
magnitudeof a quaternion p
→ the square root of the product of a quaternion with its conjugate

- unit quaternion : norm is 1

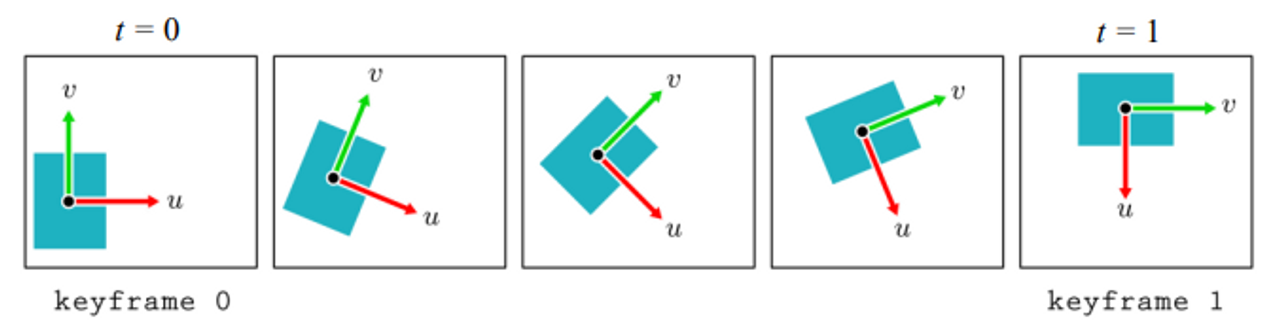
Interpolation of Quaternions
-
Quaternion : 회전 상태를 말한다. 회전 시키는 것이 아니라
→ key frame 0 에서 큐브의 쿼터니언이 있고 key1에서 큐브의 쿼터니언이 있는 것이다
-
Quaternion interpolation
→ 오일러에 비해 자연스럽게 잘 된다.
→ slerp이라는 함수를 사용한다.
-
Unity는 기본적으로 쿼터니언을 사용한다.
Quaternion and Matrix
매트릭스 형태로도 쿼터니언을 표현할 수 있고 반대로 매트릭스가 주어졌을 때 쿼터니언을 역산할 수도 있다.
🖇 Reference
해당 포스트는 강형엽 교수님의 게임그래픽프로그래밍 [GGP-23-1] 수업을 수강하고 정리한 내용입니다. 잘못된 내용이 있다면 댓글로 알려주시면 감사하겠습니다😊
[Gimbal Lock] https://en.wikipedia.org/wiki/Gimbal_lock
