gpt4.5로 작성됨.1. 들어가며
기존의 GAN(Generative Adversarial Network) 기반 방법들은 사용자의 입력과 사실적 이미지 간 균형을 유지하는 데 어려움이 있었고, 매번 새로운 데이터 수집 및 학습 과정이 필요했다. 이에 대한 대안으로 등장한 것이 바로 SDEdit(Stochastic Differential Editing)이다.
2. SDEdit란?
SDEdit는 확률적 미분 방정식(SDE, Stochastic Differential Equation)을 활용한 이미지 생성 및 편집 방법으로, 확산(diffusion) 모델의 원리를 기반으로 한다. 사용자의 입력(예: 간단한 색상 스트로크, 이미지 패치 등)을 받아 이 입력에 가우시안 잡음을 추가한 후, 이를 다시 제거하는 과정을 반복하여 현실적이고 사용자의 의도에 충실한 이미지를 생성한다.
기존 방식과의 차별점:
- 조건부 GAN(Conditional GAN): 매번 새로운 작업에 맞춰 데이터 수집과 재학습이 필요했다.
- GAN Inversion: 복잡한 역추적 과정과 작업별 손실 함수 설계가 필요하며, 때로는 입력을 충실히 표현하지 못하는 문제점이 있었다.
SDEdit는 이 두 방식의 문제를 해결하며, 별도의 재학습 없이 범용적인 이미지 편집 및 생성을 지원한다.
3. SDEdit의 핵심 개념
SDE(Stochastic Differential Equation)의 이해
- SDE는 일반적인 미분 방정식에 무작위 노이즈를 더한 것이다. 이미지 생성에서 이 SDE는 원본 이미지를 잡음으로 서서히 변환한 뒤, 이 과정을 역으로 수행하여 잡음에서 사실적인 이미지를 얻는 방식이다.
VE-SDE(Variance Exploding SDE)와 VP-SDE(Variance Preserving SDE)
- VE-SDE: 시간이 지남에 따라 노이즈가 점점 커져 마지막에는 이미지가 순수한 잡음에 가까워진다.
- VP-SDE: 데이터의 분산을 유지하면서 점점 잡음으로 변환한다.
SDEdit는 특히 VE-SDE를 기반으로 설명된다.
4. SDEdit의 알고리즘
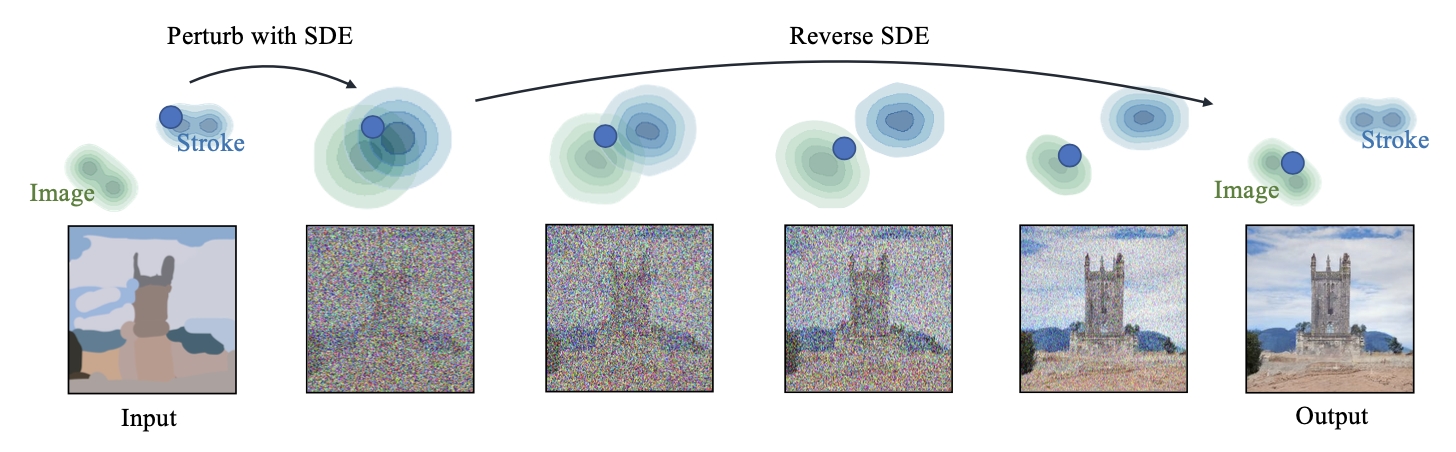
사용자로부터 가이드 이미지(간단한 스트로크 등)를 입력받아 다음의 과정을 수행한다:
- 가이드 이미지에 적절한 수준의 가우시안 노이즈를 추가한다.
- 이 노이즈가 추가된 이미지로부터 역방향 SDE를 반복적으로 적용하여 노이즈를 점점 제거한다.
- 최종적으로 사실적이며 입력에 충실한 이미지를 얻는다.
이 과정에서 중요한 하이퍼파라미터는 t₀(노이즈 추가 정도)이며, 이 값이 클수록 사실성은 증가하지만 입력 충실도는 감소하는 trade-off가 있다.
5. 수식으로 이해하는 SDEdit
SDEdit의 핵심은 확률적 미분 방정식(SDE)을 활용해 이미지를 점점 사실적인 방향으로 복원하는 것이다. 이 과정은 수식적으로 다음과 같이 표현된다:
1) Forward SDE (노이즈 추가 과정)
SDE 모델은 원본 이미지 에 시간에 따라 점점 강해지는 가우시안 노이즈를 더해 를 만든다:
- : 원본 이미지 정보의 가중치
- : 노이즈의 세기를 조절하는 함수
2) Reverse SDE (노이즈 제거 과정)
이제 에서 다시 원본 이미지로 되돌아가는 과정은 다음과 같은 역방향 확률 미분 방정식으로 표현된다:
| 기호 | 의미 | 해석 |
|---|---|---|
| 시간 일 때의 노이즈 이미지 | 시작은 노이즈 이미지 | |
| 노이즈의 변화율 | 시간이 줄어들수록 노이즈를 얼마나 제거할지 결정 | |
| 노이즈가 낀 데이터의 분포에 대한 score function | 현재 이미지가 진짜일 확률의 기울기 방향 | |
| 역방향 시간의 Wiener process (확률적 변화량) | Brownian motion (무작위성 보존) |
-
:
- :시간 t에 따른 노이즈의 분산 (시간이 지나면서 이미지에 점점 더 많은 노이즈를 섞어야 하기 때문)
- 시간 t가 0에서 1로 갈수록 노이즈의 강도가 점점 커져야 함.
확률 미분이란?
딥러닝에선 현실세계의 랜덤성을 부여하기 위해 확률 미분을 사용한다.
- : 시간 에서의 아주 작은 변화량. 여기에 무작위성이 포함.
- : 일반적인 변화 (기울기)
- : 랜덤성 추가
3) 학습: Score Matching Loss
모델은 score function을 다음과 같은 손실 함수를 통해 학습한다:
| 기호 | 의미 |
|---|---|
| 실제 데이터 이미지 (예: 학습 이미지) | |
| 표준 정규분포에서 샘플링한 노이즈 | |
| Forward SDE로 노이즈를 섞은 중간 상태 이미지 | |
| 네트워크가 학습하려는 score function, 즉 노이즈의 방향을 추정함 | |
| 시간 에서의 노이즈 세기 | |
| 전체 데이터와 노이즈에 대해 평균을 구함 |
지금 이 이미지에는 어떤 노이즈가 섞여 있는지 맞춰봐! 이 이미지가 진짜 이미지라면, 어떤 방향으로 noise를 제거하면 될까?를 학습 한다.
4) 샘플링: Euler-Maruyama로 구현
실제 샘플링은 역방향 SDE를 유한 시간 간격으로 근사하여 아래와 같이 구현된다:
이를 반복함으로써 점차 현실적인 이미지를 얻는다.
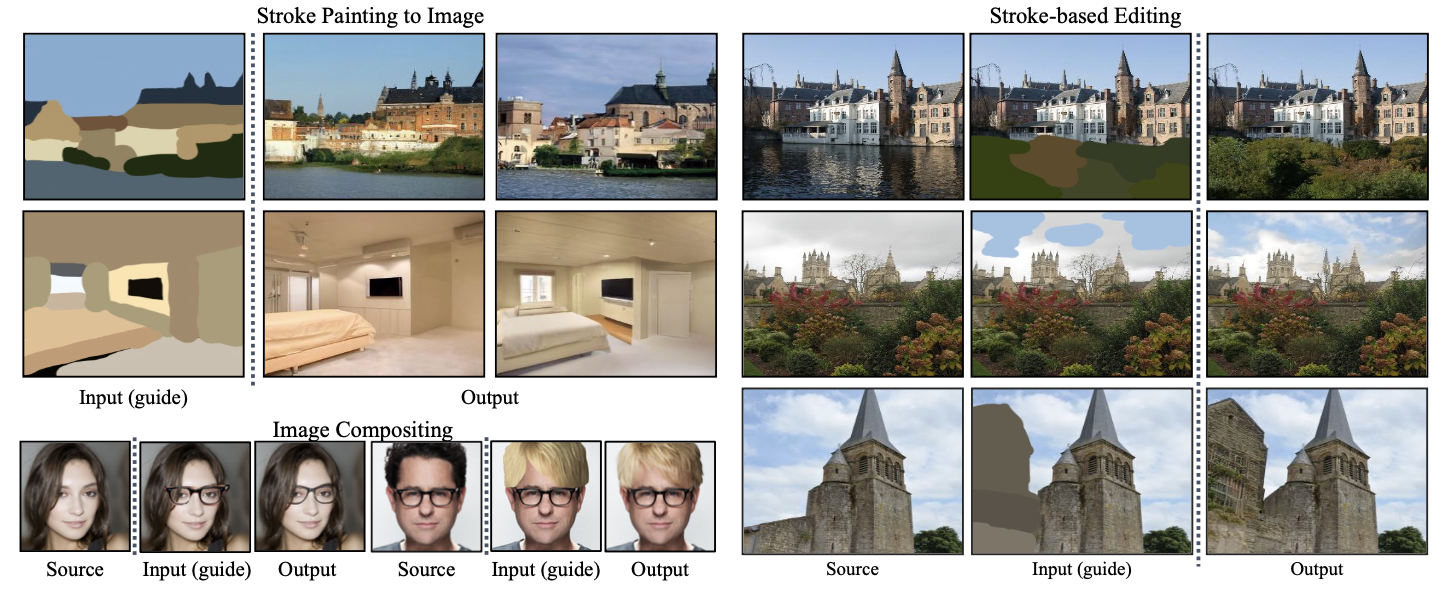
6. 실험 및 결과
SDEdit는 다음과 같은 다양한 이미지 작업에서 탁월한 성능을 보였다:
- 스트로크 기반 이미지 생성
- 이미지 합성(Image compositing)
- 스트로크 기반 이미지 편집
특히, 인간의 평가에서 기존 GAN 기반 방법들보다 현실성에서는 최대 98.09%, 전체 만족도(현실성+입력 충실도)에서는 최대 91.72% 더 높은 평가를 받았다.
7. SDEdit의 장점 요약
- 범용성: 별도의 데이터 수집이나 모델 재학습 없이 다양한 이미지 작업을 지원한다.
- 사실성과 충실도의 균형: 사용자의 의도를 정확히 반영하면서도 매우 현실적인 이미지를 생성할 수 있다.
- 간단한 적용: 기존에 미리 학습된 SDE 기반 모델을 바로 활용할 수 있다.
8. 의의
- 확산 모델의 표현력 활용: SDEdit는 확산 모델이 가진 고해상도 이미지 생성 능력을 편집 작업에도 효과적으로 활용.
- GAN의 한계 극복: 기존 GAN 기반 방식이 가진 재학습, 최적화 불안정성, latent space 제약 등의 한계를 해결..
- 재학습 없이 다양한 편집 가능: 한 번 학습된 확산 모델만으로 스트로크 기반 생성, 편집, 이미지 합성까지 수행할 수 있어 실용성이 높다.
- 조건부 생성의 새로운 방향 제시: 확산 모델에서 사용자 가이드를 중간 노이즈 수준(t₀)에서 삽입하는 방식은 이후 다양한 diffusion 기반 편집 모델에 영향을 주었다.
참고
- Chenlin Meng et al., "SDEdit: Guided Image Synthesis and Editing with Stochastic Differential Equations", Stanford University, 2022.
