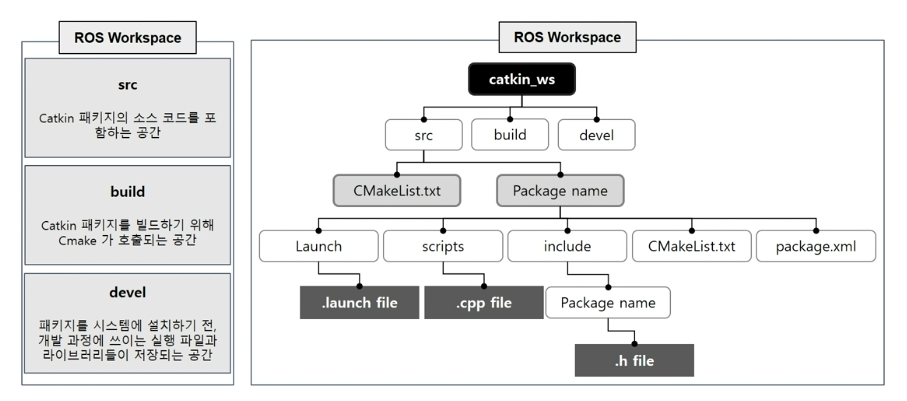
ROS 패키지 구조
ROS 쉘 명령어
| 명령어 | Description |
|---|---|
| roscd | 지정한 ROS 패키지의 디렉토리 위치로 이동 |
| rosls | ROS 패키지의 파일 목록 확인 |
ROS 정보 명령어
| 명령어 | Description |
|---|---|
| rostopic | ROS 토픽 정보 확인 |
| roservice | ROS 서비스 정보 확인 |
| rosnode | ROS 노드 정보 확인 |
| rosbag | ROS 메시지 기록, 재생 |
| rosmsg | ROS 메시지 파일 정보 확인 |
| rossrv | ROS 서비스 파일 정보 확인 |
| rosversion | ROS 패키지 및 릴리즈 버전 정보 확인 |
ROS 실행 명령어
| 명령어 | Description |
|---|---|
| roscore | 마스터 노드 실행 |
| rosrun | 노드 실행 |
| roslaunch | 여러 노드 실행 및 실행 옵션 설정 |
| rosclean | Ros log file 검사 및 삭제 |
ROS catkin 명령어
| 명령어 | Description |
|---|---|
| catkin_create_pkg | Catkin 빌드 시스템으로 패키지 자동 생성 |
| catkin_make | Catkin 빌드 시스템에 기반을 둔 빌드 |
| catkin_init_workspace | Catkin 빌드 시스템 작업 폴더 초기화 |

초심 잃지 말기 🙂