설치:
(base) C:\Users\dd>activate yolov5
(yolov5) C:\Users\dd>pip install mediapipe
(yolov5) C:\Users\dd>jupyter notebook
https://developers.google.com/mediapipe/solutions/examples
import cv2
import mediapipe as mp# 캠 연결하기
import cv2
# mediapipe 사용하기
# 손찾디 관련 기능 불러오기
mp_hands = mp.solutions.hands
#손 그려주는 기능 불러오기
mp_drawing = mp.solutions.drawing_utils
# 손 찾기 관연 세부 설정
hands = mp_hands.Hands(
max_num_hands = 1,# 탐지할 최대 손의 객수
min_detection_confidence = 0.5, # 표시할 손의 최소 정확도
min_tracking_confidence = 0.5 # 표시할 관잘의 최소 정확도
)
video = cv2.VideoCapture(0)
while video.isOpened():
ret, img = video.read()
img = cv2.flip(img,1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
result = hands.process(img) # 손 탐지하기
img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
if not ret:
break
# 찾은 손 표시하기
if result.multi_hand_landmarks is not None:
# print(result.multi_hand_landmarks)
for res in result.multi_hand_landmarks:
mp_drawing.draw_landmarks(img, res, mp_hands.HAND_CONNECTIONS)
k = cv2.waitKey(30)
if k==49:
break
cv2.imshow('hand', img)
video.release()
cv2.destroyAllWindows()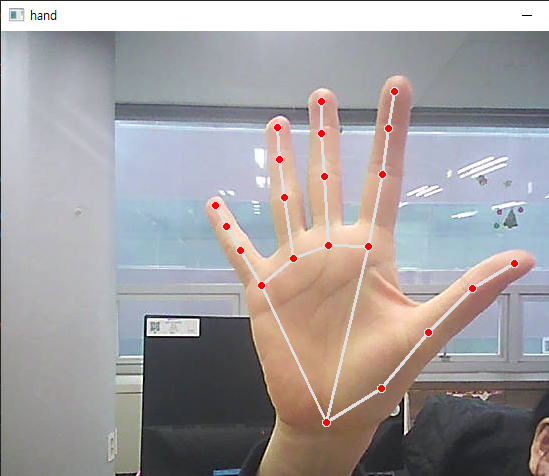
한손 동작 인식시키기🐱🚀
정의
- 손가락 관절 위치 (mediapipe에서 출력된 값)
- 관절끼리 연결한 뼈의 값 구하기(점을 연결한 선)
- 뼈 사이의 각도 구하기
- KNN모델에 예측시키기
- 이미지에 예측값 표현
https://developers.google.com/mediapipe/solutions/vision/hand_landmarker#get_started
landmark{
x: 0.86945135
y: 0.56984164
z: 0.21968469}
Enumerate() in Python
The enumerate () method adds a counter to an iterable and returns it in the form of an enumerating object. This enumerated object can then be used directly for loops or converted into a list of tuples using the list() function.
Syntax: enumerate(iterable, start=0)
Parameters:
Iterable: any object that supports iteration
Start: the index value from which the counter is to be started, by default it is 0
Return: Returns an iterator with index and element pairs from the original iterable
# 캠 연결하기
import cv2
import mediapipe as mp
import numpy as np
from sklearn.neighbors import KNeighborsClassifier
# 인식 가능한 11가지 동작
gesture = {
0:'fist', 1:'one', 2:'two', 3:'three', 4:'four', 5:'five',
6:'six', 7:'rock', 8:'spiderman', 9:'yeah', 10:'ok',
}
# 가위바위보 동작 만들기
rsp = {
0: 'rock', 5: 'paper', 9:'scissors'
}
# 동작 인식 모델 만들기 (knn모델)
file = np.genfromtxt('./data/gesture_train.csv', delimiter = ',')
X = file[:,:-1].astype(np.float32)
y = file[:,-1].astype(np.float32)
knn = KNeighborsClassifier(n_neighbors = 3)
knn.fit(X,y)
# mediapipe 사용하기
# 손찾디 관련 기능 불러오기
mp_hands = mp.solutions.hands
#손 그려주는 기능 불러오기
mp_drawing = mp.solutions.drawing_utils
# 손 찾기 관연 세부 설정
hands = mp_hands.Hands(
max_num_hands = 2,# 탐지할 최대 손의 객수
min_detection_confidence = 0.5, # 표시할 손의 최소 정확도
min_tracking_confidence = 0.5 # 표시할 관잘의 최소 정확도
)
video = cv2.VideoCapture(0)
while video.isOpened():
ret, img = video.read()
img = cv2.flip(img,1)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
result = hands.process(img) # 손 탐지하기
img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
if not ret:
break
# 찾은 손 표시하기
if result.multi_hand_landmarks is not None:
rsp_result = []
#d이미지 손 표현하기
# print(result.multi_hand_landmarks)
for res in result.multi_hand_landmarks:
joint = np.zeros((21,3)) # 21개 관절, xyz값 저장할 배열 생성
# enumerate = for문의 순서 표현
for j,lm in enumerate(res.landmark):
joint[j] = [lm.x, lm.y,lm.z]
# 연결할 관절 번호 가져오기
v1 = joint[[0,1,2,3,0,5,6,7,0,9,10,11,0,13,14,15,0,17,18,19],:]
v2 = joint[[1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20],:]
v = v2-v1 # 뼈의 값 (x,y,z좌표값 > 백터값)
# 유클리디안 길이로 변롼(피타고라스)
# 뼈의 값(직선 값)
v = v/np.linalg.norm(v, axis = 1)[:, np.newaxis]
# 뼈의 값으로 뼈사이의 각도 구하기, 변화값이 큰 15개
angle = np.arccos(np.einsum('nt,nt->n',
v[[0,1,2,4,5,6,8,9,10,12,13,14,16,17,18],:],
v[[1,2,3,5,6,7,9,10,11,13,14,15,17,18,19],:]))
# radian 각도를 degree각도로 변경하기
angle = np.degrees(angle)
# 구한 각도를 knn모델에 예측시키기
# 학습을 위해서 타입 변경 (2차원 array)
X_pred = np.array([angle],dtype = np.float32)
results = knn.predict(X_pred)
idx = int(results)
# 인식된 제스쳐 표현하기
img_x = img.shape[1]
img_y = img.shape[0]
hand_x = res.landmark[0].x
hand_y = res.landmark[0].y
#cv2.putText(img, text = gesture[idx].upper(),
# org = ( int(hand_x * img_x), int(hand_y * img_y )),
# fontFace=cv2.FONT_HERSHEY_SIMPLEX, fontScale=1, color=(255, 255, 255), thickness=2
# )
if idx in rsp.keys(): # 0,5,9 번 일때만 실행
cv2.putText(img, text = rsp[idx].upper(),
org = ( int(hand_x * img_x), int(hand_y * img_y )),
fontFace=cv2.FONT_HERSHEY_SIMPLEX, fontScale=1, color=(255, 255, 255), thickness=2
)
rsp_result.append({
'rsp': rsp[idx],
'org': ( int(hand_x * img_x), int(hand_y * img_y )+20),
})
mp_drawing.draw_landmarks(img, res, mp_hands.HAND_CONNECTIONS)
# 누기 이겼는지 판단하기
if len(rsp_result) == 2:
winner = None
text = ''
if rsp_result[0]['rsp'] == 'rock':
if rsp_result[1]['rsp'] == 'rock': text = 'Tie';
elif rsp_result[1]['rsp'] =='paper':text = 'Paper win'; winner =1;
elif rsp_result[1]['rsp'] == 'scissors':text ='Rock win'; winner = 0;
elif rsp_result[0]['rsp'] == 'paper':
if rsp_result[1]['rsp'] == 'paper': text = 'Tie';
elif rsp_result[1]['rsp'] =='rock':text = 'Paper win'; winner =0;
elif rsp_result[1]['rsp'] == 'scissors':text ='Scissors win'; winner = 1;
elif rsp_result[0]['rsp'] == 'scissors':
if rsp_result[1]['rsp'] == 'scissors': text = 'Tie';
elif rsp_result[1]['rsp'] =='rock':text = 'Rock win'; winner =1;
elif rsp_result[1]['rsp'] == 'paper':text ='Scissors win'; winner = 0;
cv2.putText(img, text = text,
# 이미지 중앙에 결과 표시
org =( int(img_x/3),100),
fontFace=cv2.FONT_HERSHEY_SIMPLEX, fontScale=2, color=(0, 0, 255), thickness=3
)
k = cv2.waitKey(30)
if k==49:
break
cv2.imshow('hand', img)
video.release()
cv2.destroyAllWindows()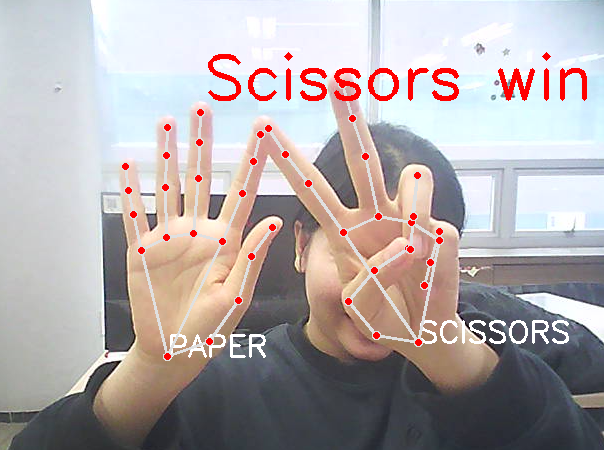

열심히 공부합시다! The best is yet to come! 💜