📌 turtlesim 설치
$ sudo apt update
✅ $ sudo apt upgrade 업그레이드도 해주자_!
$ sudo apt install ros-foxy-turtlesim

📌 turtlesim 실행
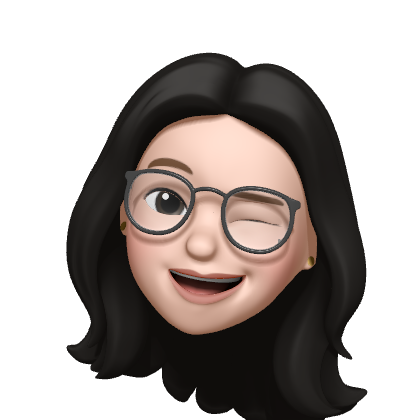
$ ros2 run turtlesim turtlesim_node
$ ros run turtlesim turtle_teleop_key
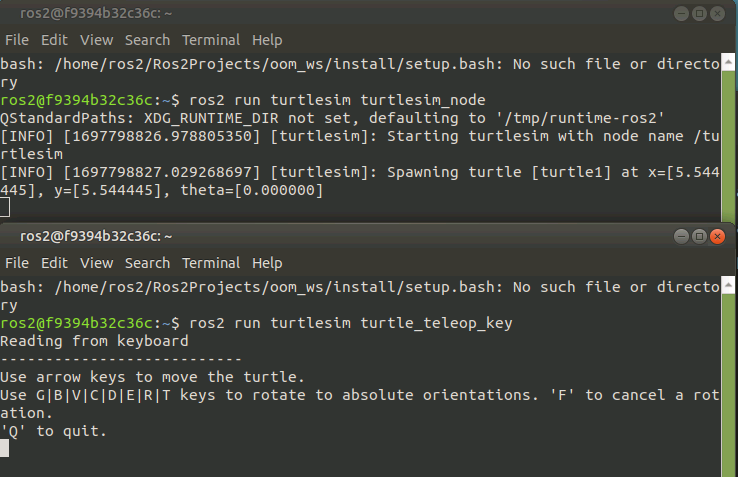
➡ 방향키로 거북이를 이동할 수 있다!_!
$ sudo apt-get install ros2-melodic-rqt
$ sudo apt install ros-foxy-rqt
// rqt 설치
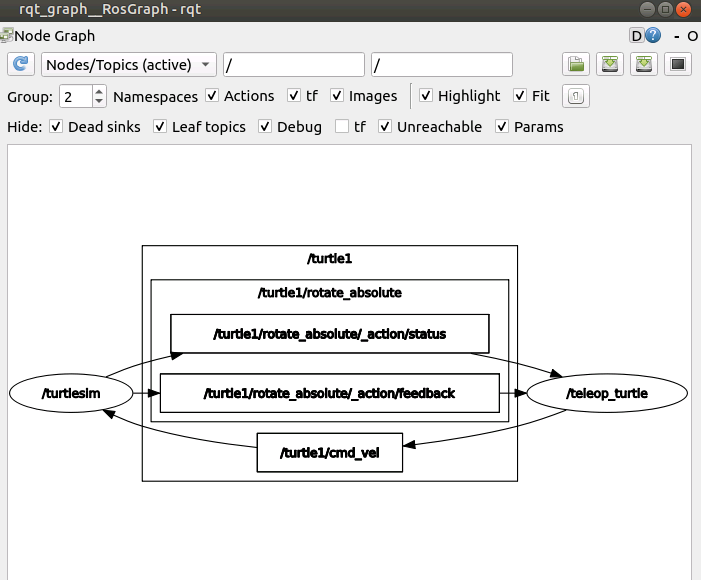
$ rqt_graph
// rqt 실행