👨🏫학습목표
오늘은 Target Network의 작동원리와 DQN의 pseudo code, DQN 속 CNN에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=C-mfKSM0VFQ&list=PLvbUC2Zh5oJtYXow4jawpZJ2xBel6vGhC&index=18
1️⃣ Target Network
📕 지난 시간에 배운 내용
- DQN은 Q-learning에서 Q-table 대신 Q-Network를 사용하는 모델이다.
- DQN은 state space가 크거나 continuous해도 데이터를 처리할 수 있다.
- 다만 Action space는 아직 작고, discrete하다.
- DQN는 Replay Buffer와 Target Network를 통해 성능을 개선한다.
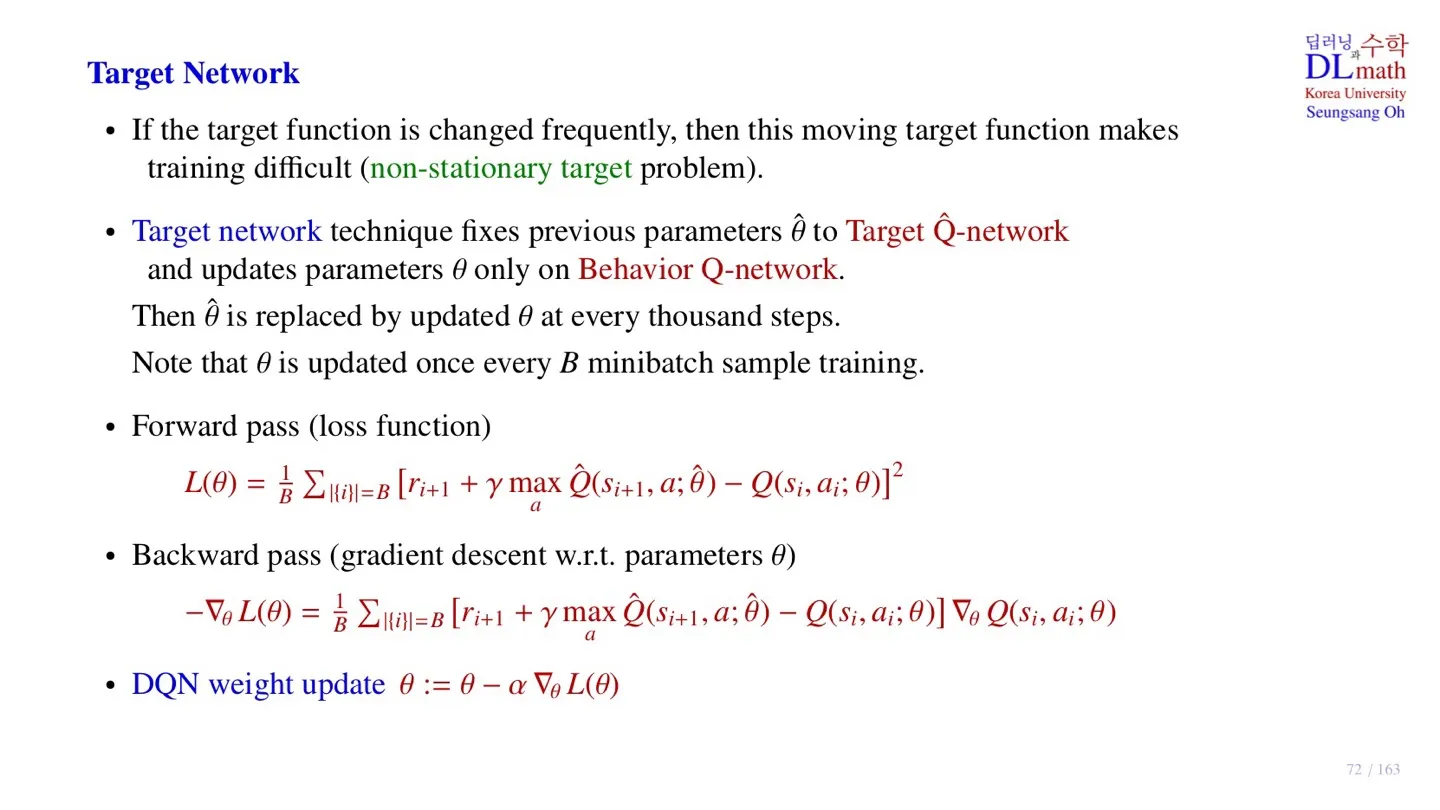
🔷 Target Network
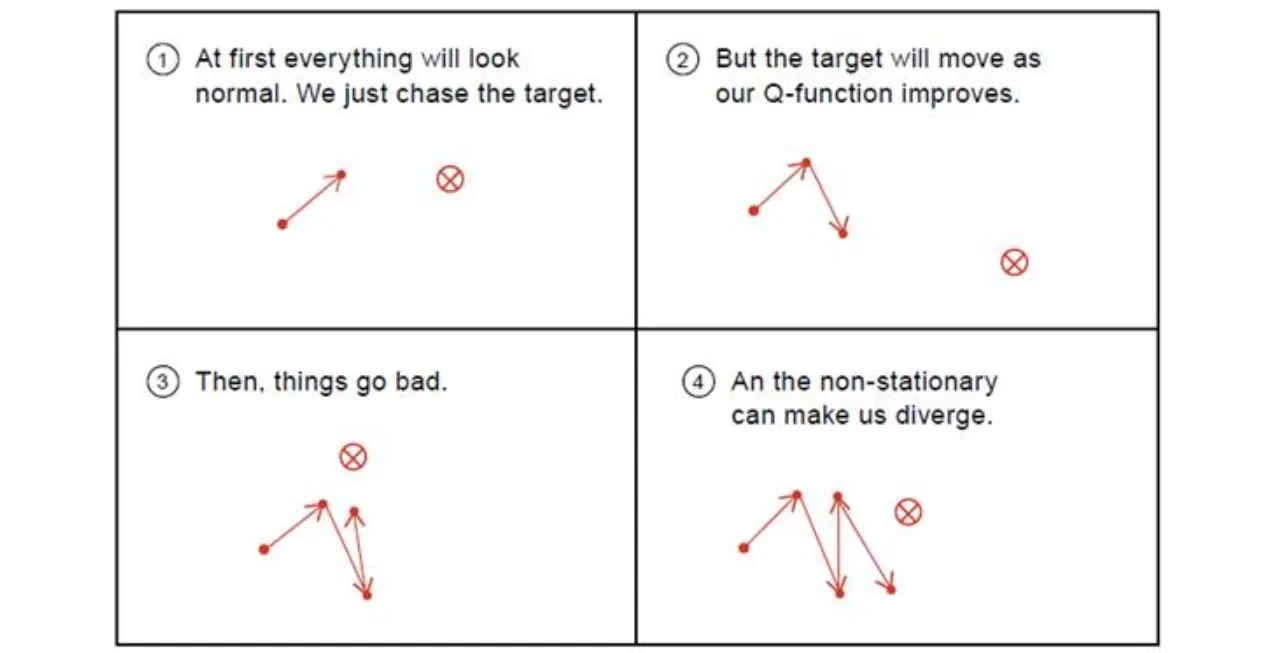
🔻 Naïve DQN의 Loss function
- Target으로 를 사용하는데, 이 값은 업데이트할 때마다 다른 값을 가진다.
- 즉 하나의 minibatch 내에서 업데이트를 진행할 때, samp에 따라 Target값이 계속 바뀐다.
- 이를 Non-stationary target problem이라 한다.
출처: https://livebook.manning.com/book/grokking-deep-reinforcement-learning/chapter-9/v-9#27
✨이러한 문제를 해결하기 위해서는 Target Network를 고정해야 한다.
🔻 Behavior -Network
- 모델이 실제로 행동할 때 사용하는 Network이다.
- 에 해당한다.
🔻 Target -Network
- 에 해당한다.
🔻 Target Network의 구현 방법
- Behavior -Network 는 매번 업데이트를 진행한다.
- Target -Network 은 업데이트 하지 않고 고정한다.
- Target -Network 은 일정 time step이 지난 후 로 업데이트한다.
- 동일한 CNN Q-Network를 사용하지만 서로 다른 파라미터 을 사용하는 것이다.
🔷 Target Network의 Loss function
🔻 Forward pass
- Replay Buffer를 통해 minibatch를 사용하기에 생겨난 항이다.
- 일정 step동안 고정시켜 Non-stationary target problem을 해결한다.
🔻 Backward pass
- Loss function을 에 대해서 미분한다.
- DQN weight updata :
2️⃣ Diagram을 통한 DQN 작동방식 이해
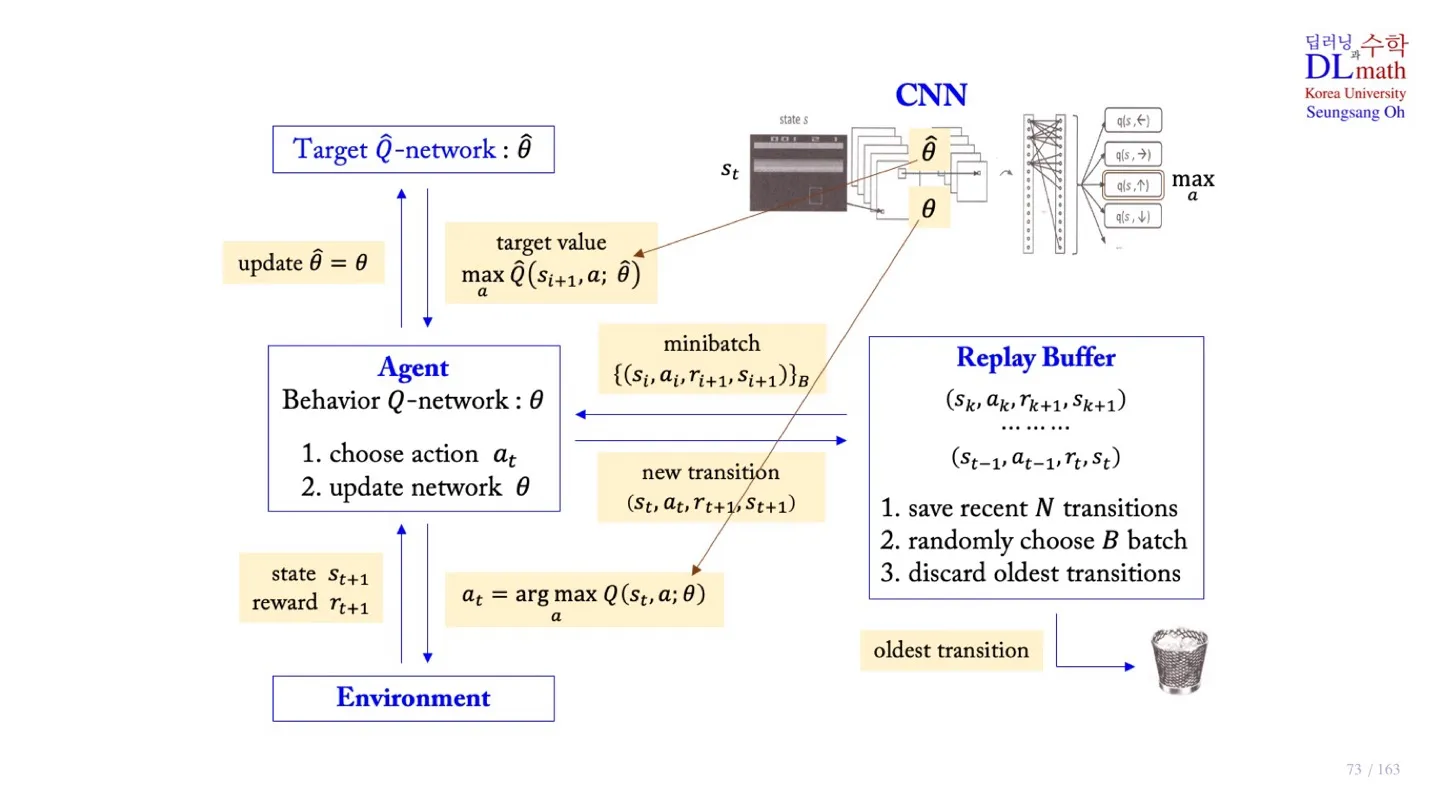
🔻 Sample을 얻는 과정
- 주어진 state 에서 Behavior -Network 를 사용하여 Q-value를 구한다.
- 가장 큰 action을 찾은 후, -greedy policy를 통해 최종 aciton을 선택한다.
- 해당 action을 Environment에 적용한다. (execute in emulator)
- Reward 과 next state 을 얻는다.
- 새로운 sample data 를 Replay Buffer에 저장한다.
- 저장된 data가 100,000개가 넘을 경우 가장 오래된 sample data를 제거한다.
🔻 Behavior -Network를 업데이트 하는 과정
-
Replay Buffer에서 minibatch 크기만큼 데이터를 sampling한다.
-
값을 계산한다.
-
Behavior -Network 를 방식으로 업데이트한다.
3️⃣ DQN의 pseudo code
📌 용어정리
t번째 화면의 스크린 이미지
이미지 전처리 함수, 이미지를 gray scale에 84 X 84 pixel로 바꿔준다.
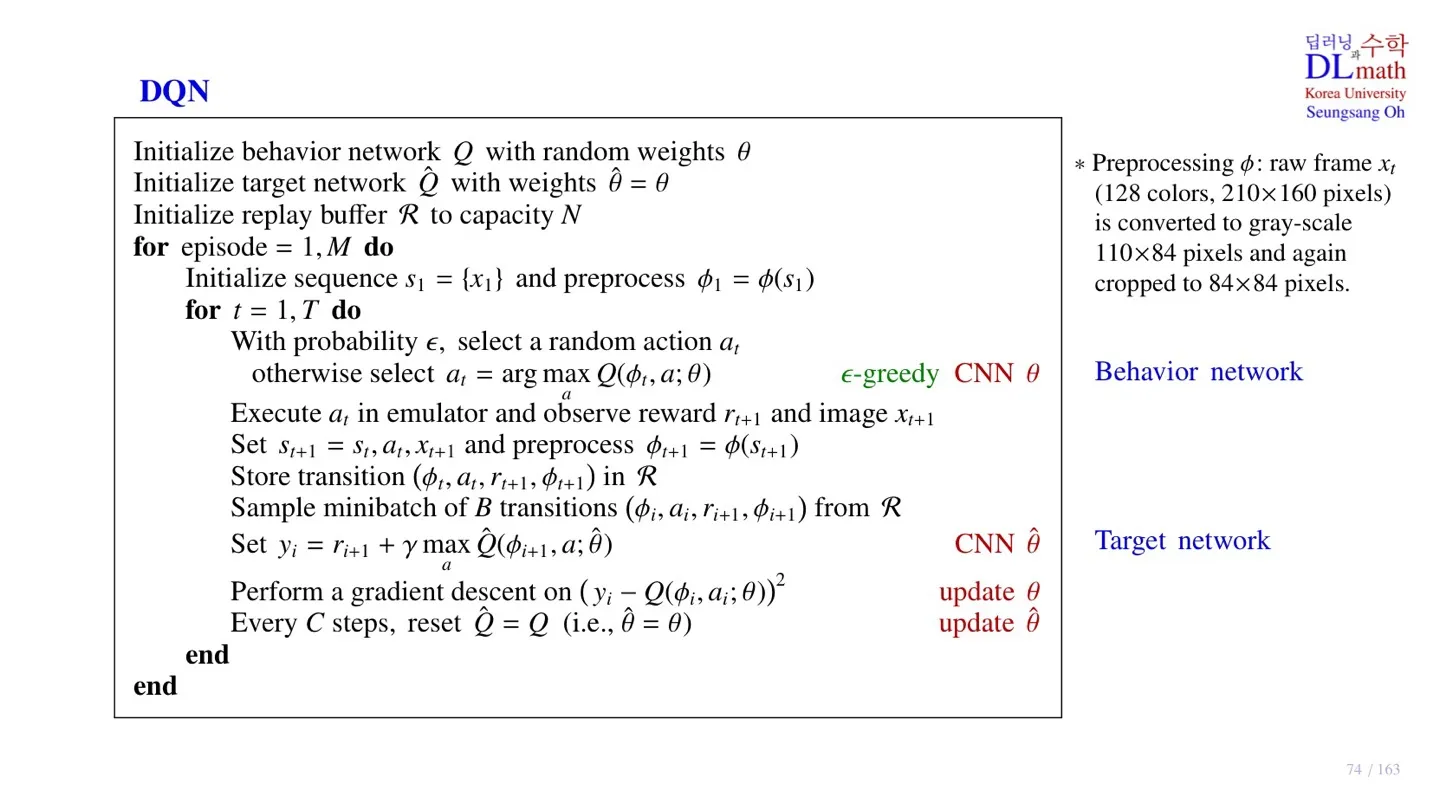
🔷 Pseudo Code
🔻 Initailize
- Behavior -Network 를 random하게 초기화한다.
- Target -Network 을 Behavior -Network 와 동일한 값으로 초기화한다.
- Replay Buffer의 크기 을 지정한다.
🔻 Preprocessing
- 입력 이미지 를 로 정한 후 를 통해 전처리한다.
🔻 Experience
- CNN 와 -greedy policy를 통해 action 를 결정한다.
- 를 실행하여 Reward 과 next image 을 얻는다.
- 를 통해 을 구한다.
- 를 Replay Buffer에 저장한다.
🔻 Behavior -Network Update
- MiniBatch 수 만큼 Replay Buffer에서 sampling한다.
- Target값 를 계산한다.
- 에 gradient descent를 적용하여 Behavior -Network 를 업데이트 한다.
🔻 Target -Network Update
- 일정 step 가 지날 때마다 로 업데이트 한다.
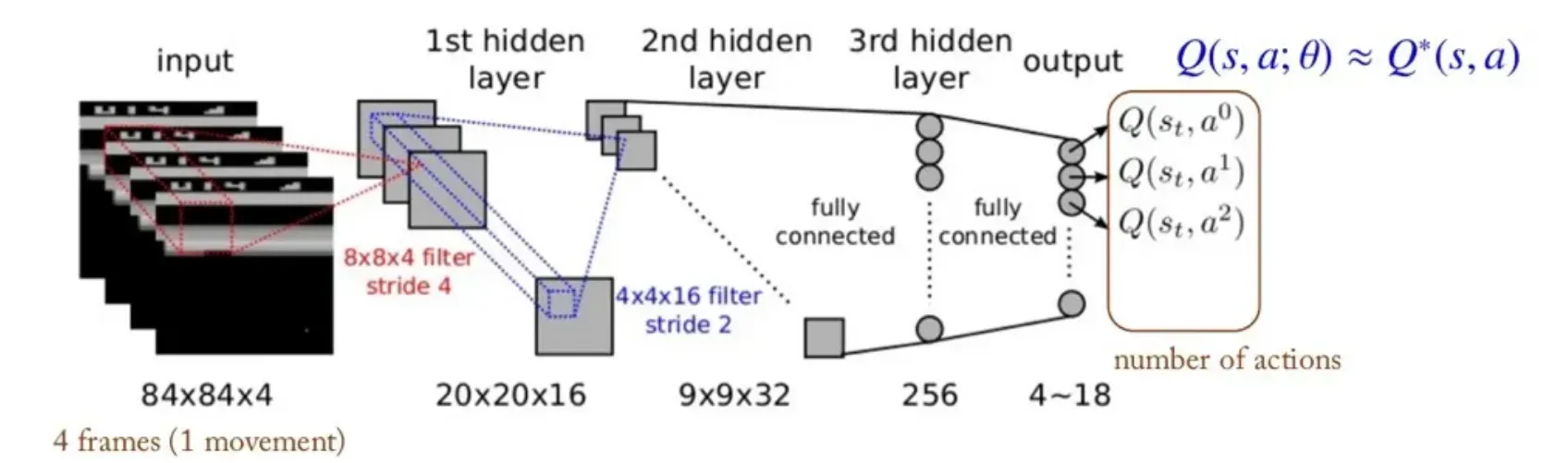
4️⃣ CNN in DQN
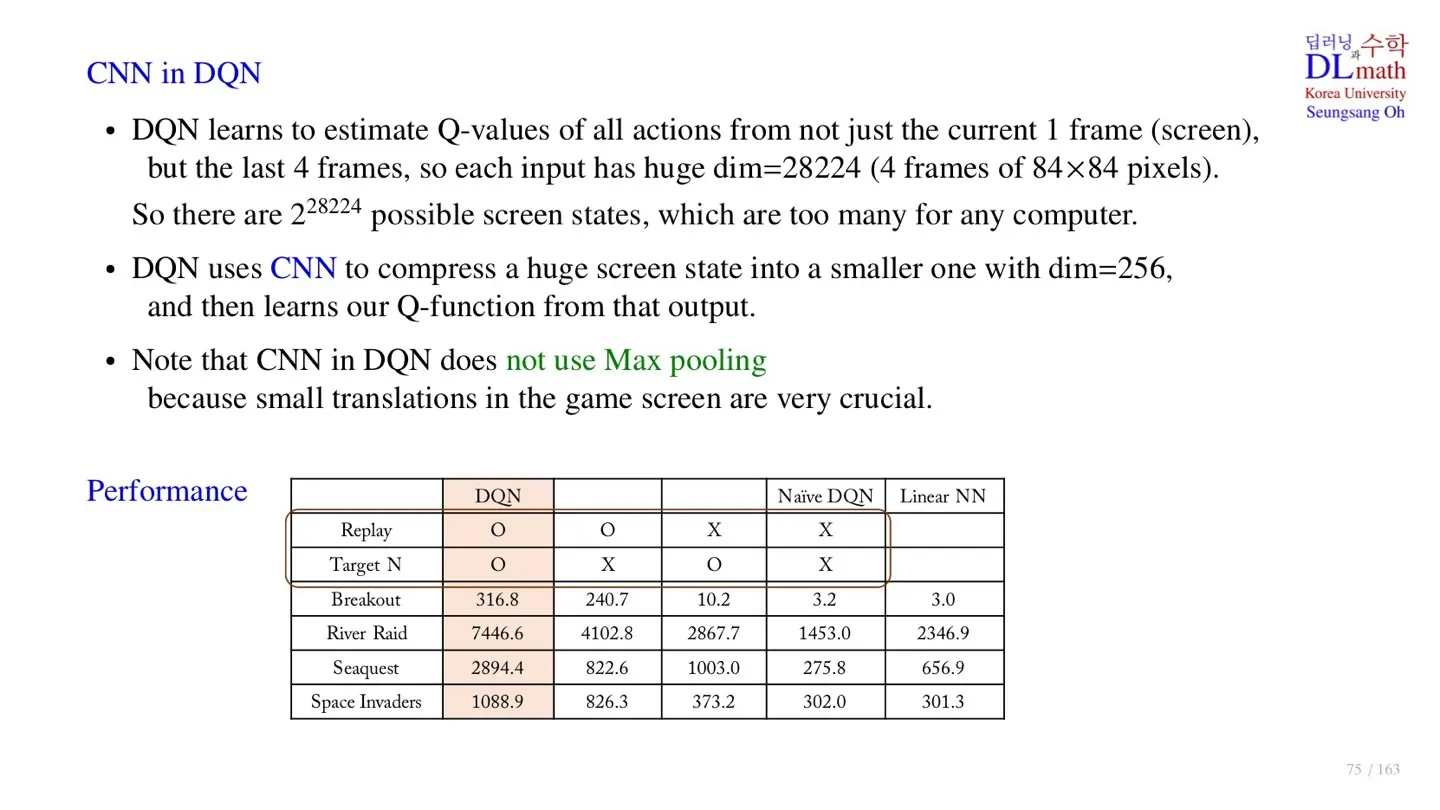
🔷 CNN을 통한 데이터 차원 축소
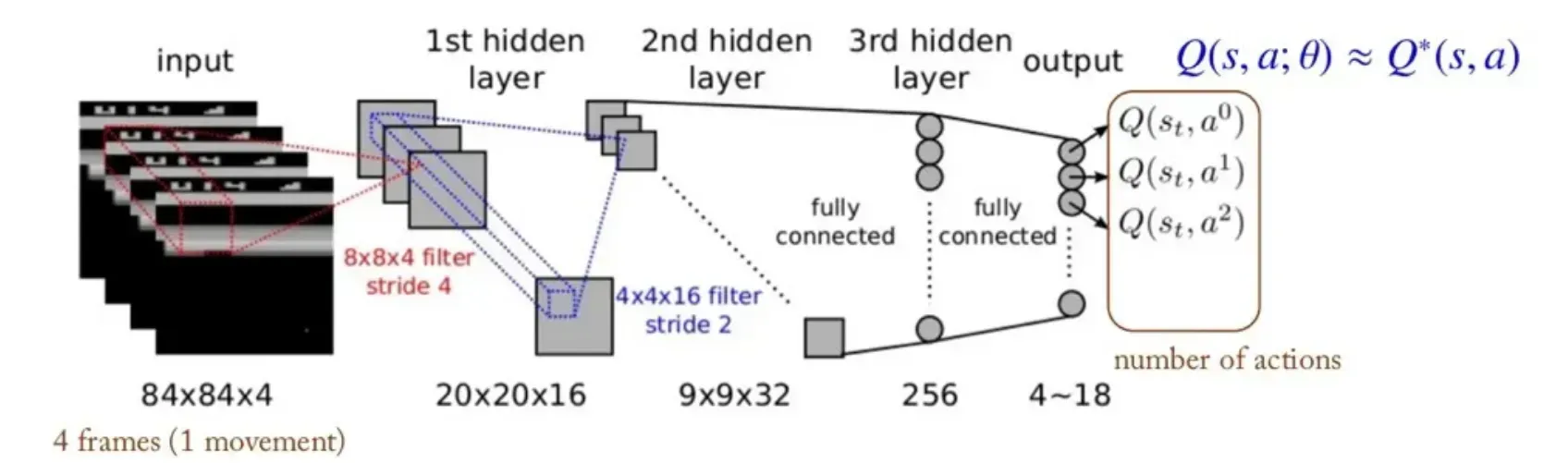
- 입력 데이터로 4개의 channel을 받는다. 이를 통해 객체의 움직임을 이해할 수 있다.
- Gray scale이기 때문에 가능한 screen state는 이다.
- Input data를 CNN layer를 통해 의 데이터로 변환한다.
🔻 Max pooling을 사용하지 않는 이유
- Max pooling은 translation invariance를 위해 사용한다.
- 하지만 실제 game에서는 객체의 위치가 중요하기 때문에 DQN의 CNN에서는 max pooling을 사용하지 않는다.
🔷 성능 비교
| DQN | Naïve DQN | Linear NN | |||
|---|---|---|---|---|---|
| Replay | O | O | X | X | |
| Target N | O | X | O | X | |
| Breakout | 316.8 | 240.7 | 10.2 | 3.2 | 3.0 |
| River Raid | 7446.6 | 4102.8 | 2867.7 | 1453.0 | 2346.9 |
| Seaquest | 2894.4 | 822.6 | 1003.0 | 275.8 | 656.9 |
| Space Invaders | 1088.9 | 826.3 | 373.2 | 302.0 | 301.3 |
5️⃣ 정리
🔷 18강에서 배운 내용은 아래와 같다.
- Target Network를 적용하는 방법에 대해 배웠다.
- Target Network를 위한 Loss function에 대해 배웠다.
- Diagram을 통해 DQN의 작동원리를 살펴보았다.
- DQN의 pseudo code에 대해 살펴보았다.
- DQN 속 CNN의 역할과 특징에 대해 살펴보았다.

I'm curious about AI