👨🏫학습목표
오늘은 Dueling DQN의 구조와 한계, 한계를 극복하기 위한 방법에 대해 배워볼 예정이다.
👨🎓강의영상: https://www.youtube.com/watch?v=8E22UY6XXfc&list=PLvbUC2Zh5oJtYXow4jawpZJ2xBel6vGhC&index=20
📃 Dueling DQN 논문: https://arxiv.org/pdf/1511.06581
1️⃣ Dueling DQN
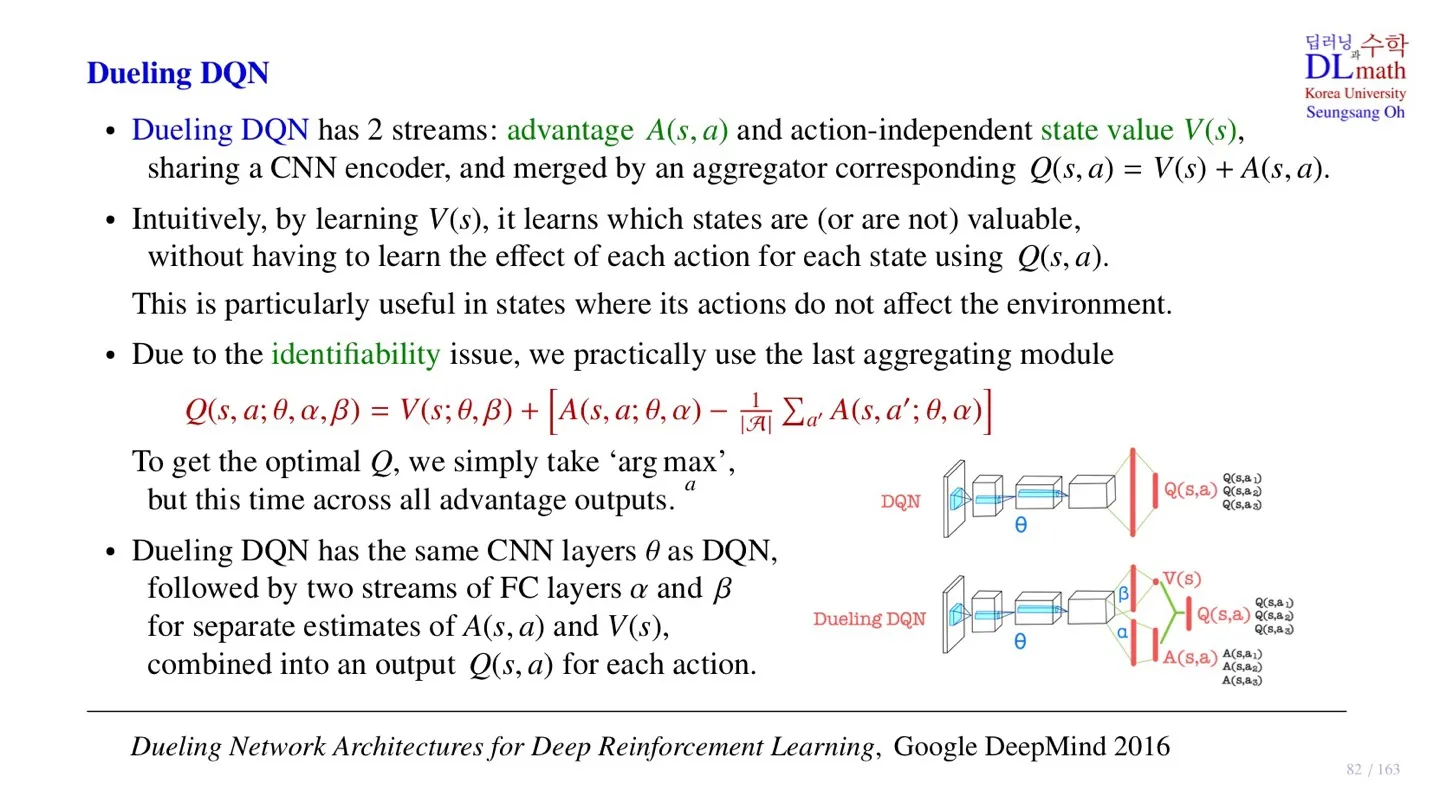
🔷 DQN 출력 살펴보기
🔻 기존의 DQN의 출력
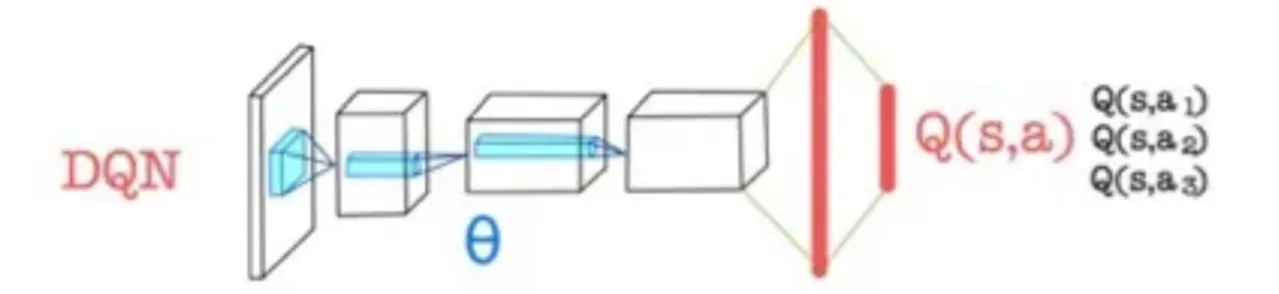
- 기존의 DQN은 입력된 State에서 취할 수 있는 모든 action에 대한 Q-value값을 출력한다.
- Q-Network라고 한다.
- CNN을 이용하여 이미지의 feature를 추출한 후 FC layer를 통해 Q-value를 출력한다.
- CNN 부분을 CNN encoder라고 부른다.
🔻 Dueling DQN의 출력
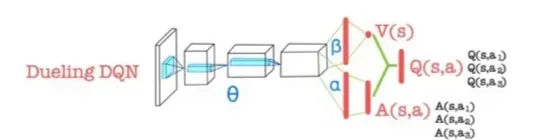
- Dueling DQN은 Q-value값 대신 다른 2가지 값을 출력한다.
- 첫 번째는 advantage function value 이고, 다른 하나는 state value 이다.
- Advantage function value 는 모든 action에 대한 각각의 값이 출력된다.
- state value 은 action과 독릭적으로 하나의 값을 출력한다.
- CNN encoder에서는 데이터를 하나의 파라미터 로 처리한 후 FC layer에서 레이어로 개별적으로 처리된다.
- 를 통해 구할 수 있다.
- Advantage function value 와 state value 을 통해 를 구하는 모듈을 aggregator라고 한다.
📕 Advantage function
- 수식의 의미: 특정 action에서의 총 reward의 기대값과 모든 action의 총 reward의 기대값의 차이
- 이면 해당 action이 평균보다는 좋은 선택이라는 의미이다.
🤔 Dueling DQN을 개발한 이유는 뭘까?
Dueling DQN이 기존의 DQN과 다른 점은 state value 값을 출력한다는 것이다. 그렇다면 왜 state value 값을 출력할까?
먼저 State value 는 해당 state가 가치가 있는지 없는지 판단할 수 있다는 의미를 가진다.
일반적으로 강화학습에서는 state-action value 에 집중한다. 구체적인 값보다는 어떤 action을 선택할지 판단할 근거가 되기 때문이다.
그럼에도 불구하고 State value 을 출력하는 이유는 다음 페이지에서 알아보자.
🔷 Dueling DQN의 특징
구체적인 내용은 향후 다룰 예정이다.
- State-value 를 알기 때문에 action이 environment에 영향을 크게 끼치지 않을 때도 state에 대한 평가가 가능하다.
- Aggregator 모듈을 사용하기 때문에 Identifiability 문제가 발생한다.
- 위 수식을 통해 Identifiability 문제를 해결할 수 있다.
2️⃣ Value and advantage saliency map
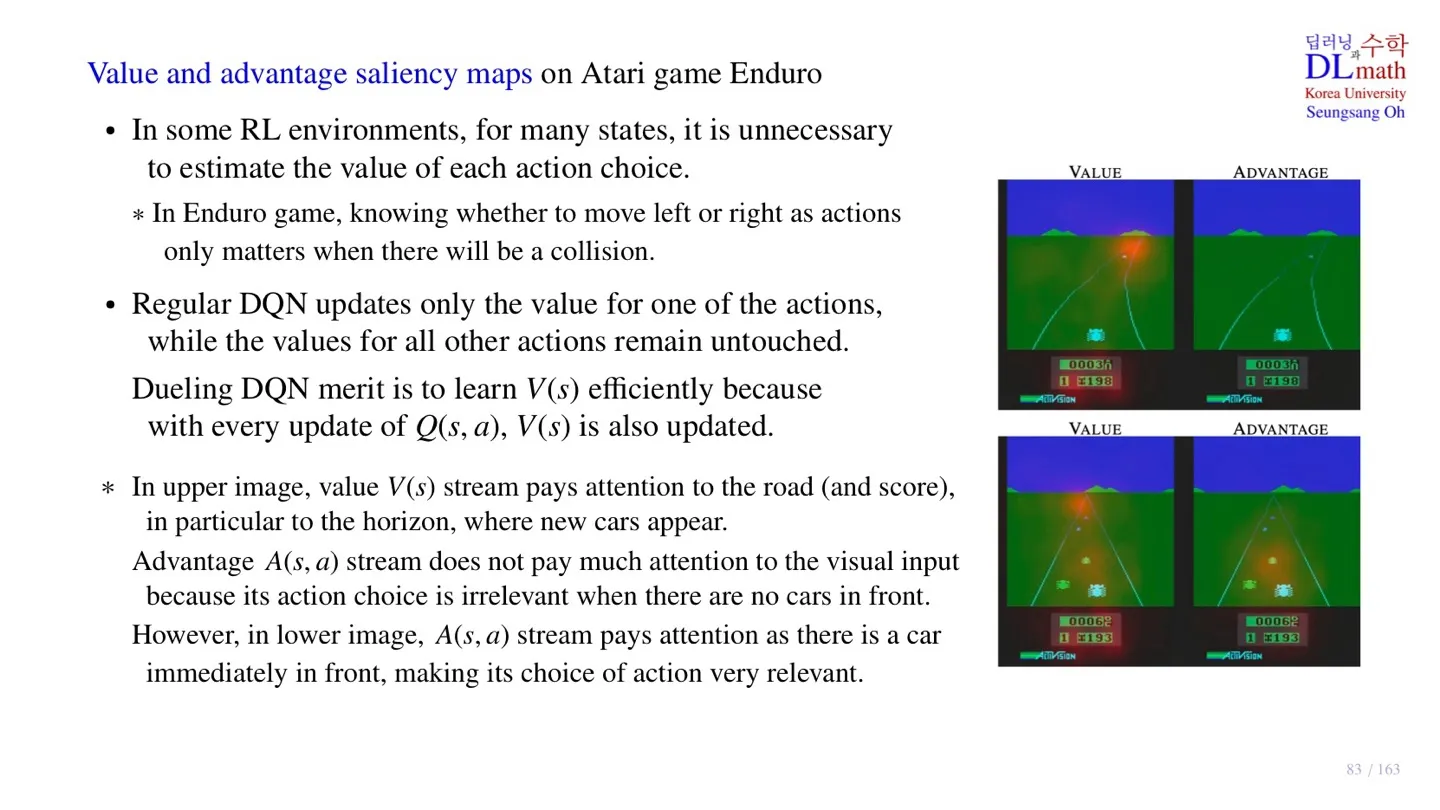
붉은색으로 표시된 부분이 CNN 모델이 집중해서 보고 있는 곳이다.
🔷 첫 번째 그림
- 멀리서 장애물이 오고 있는 상황이다.
- Advantage function은 크게 동작하지 않는다.
- 어떤 Action을 취해야 할지에 대한 정보가 중요하지 않은 대표적인 예시이다.
- 이러한 상황에서는 보다 가 더 중요할 수 있다.
🔻 Advantage
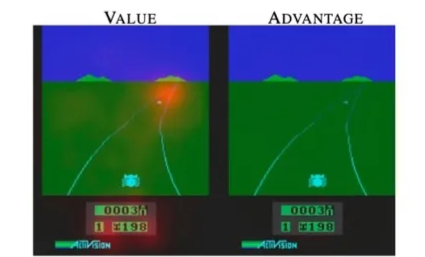
- Advantage function은 현재의 action에 대한 보상을 중요시한다.
- 현재 장애물이 자동차 근처에 없기 때문에 어떠한 행동을 취해도 큰 문제가 없다.
- 따라서 모델이 크게 집중해야할 부분이 없다.
🔻 Value
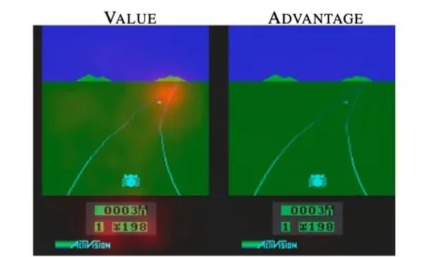
- Value function은 Action과 관계없이 현재의 상황이 좋은지 좋지 않은지 평가한다.
- 바로 앞에는 장애물이 없기 때문에 집중하지 않고, 향후 다가올 장애물에 집중하고 있다.
🔷 두 번째 그림
- 바로 앞에 장애물이 존재한다.
- 첫 번째 그림과 달리 Advantage function이 잘 작동하고 있다.
🔻 Advantage
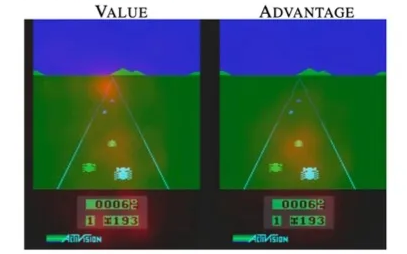
- 왼쪽 끝에 있는 장애물은 어느 정도 피하였기 때문에 새로 다가오는 장애물에 집중한다.
🔻 Value

- 멀리 있는 장애물과 가까이 있는 장애물을 모두 고려하고 있다.
🔷 Regular DQN vs Dueling DQN
🔻 Regular DQN
- Regular DQN은 Q-value를 업데이트 한다.
- 이때 sample 데이터에 해당하는 값만을 업데이트 한다.
🔻 Dueling DQN
- Dueling DQN은 Advantage function과 State-value function을 학습한다.
- 이때 sample 데이터에 해당하는 값만이 업데이트 된다.
- 하지만 모든 를 구할 때 사용되는 값이 업데이트되기 때문에 전체 를 조금씩 업데이트한 효과가 있다.
3️⃣ Identifiability Issue
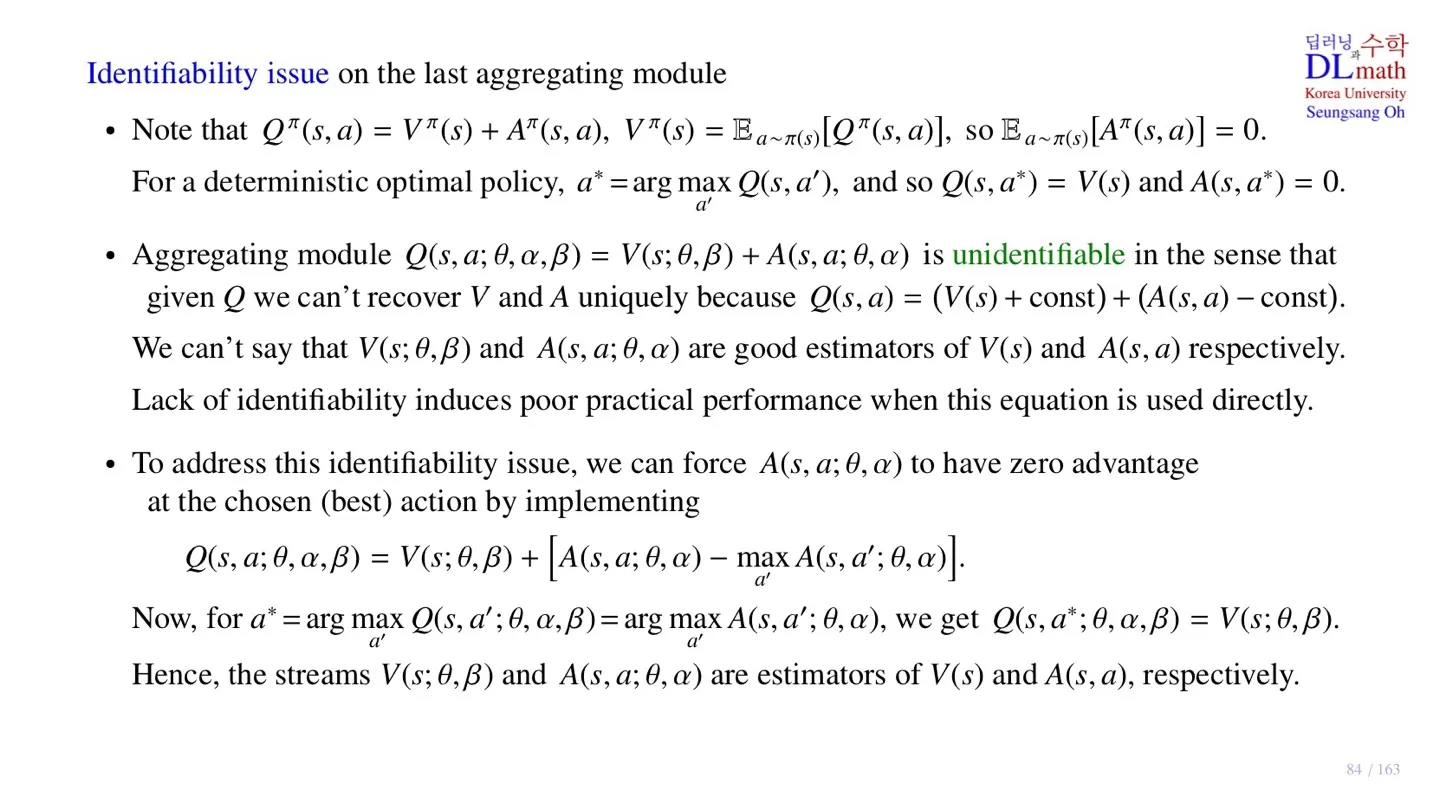
📕 기본적인 이론
- 기본적을 Q-value는 state value와 advantage value의 합으로 구할 수 있다.
- 이때 현재 policy 에서 state value는 해당 state에서 취할 수 있는 모든 action value의 기대값으로 구할 수 있다.
- 이때 기대값은 각 action이 발생할 확률을 기준으로 만들어지며 state value는 해당 조건에 독립적이다.
- 첫 번째 수식의 양변에 action이 발생할 확률에 대한 기대값을 취해주면 Q-value function은 2번째 수식에 따라 Value function으로 변한다.
- 우변의 Value function을 action에 대한 확률과 무관하기 때문에 기대값에서 벗어난다.
- 양변의 value function을 제거하면 위 수식이 유도된다.
- 최적의 Policy를 구했다면 해당 policy의 각 state에서 최적의 action을 선택할 수 있다.
- Optimal policy에서는 Deterministic하게 작동하기 때문에 Q-value는 state value를 의미한다.
- 따라서 첫 번째 수식에서 optimal policy를 적용하고 5번째 수식을 적용하면 위 수식이 유도된다.
🔷 Aggregating module
- State value function과 Advantage function을 합하여 Q-value function을 구한다.
🔻 Identiability Issue
- 주어진 를 통해 정확한 와 를 구하기 어렵다.
- Dueling DQN을 업데이트할 때는 를 기준으로 업데이트를 진행한다.
- 따라서 와 에 대한 정보가 없다면 업데이트를 할 수 없다.
🔻 Solution
- 이를 해결하기 위해서는 나 중 한 가지가 정확한 기준점을 가지고 있어야 한다.
- 우리는 앞서 Optimal policy에서 Q-value는 state value를 의미함을 확인했다.
🤔 그런데 이 수식이 어떻게 Advantage와 Value state에 기준점을 제공할 수 있을까?
우선 생각해 볼만한 점은 모델이 Optimal 한 경우 state-value값이 Q-value값과 같아진다는 점이다.
- DDQN의 Loss function이다.
- 이때 우리는 가장 오른쪽의 값이 target값에 가까워지도록 학습한다.
- 그래서 값을 gradient descent로 바꾸는데 이때 마주하게 되는 문제가 Identifiability Issue이다.
값을 변화시키기 위해 각 와 를 어떤 방향을 변화시켜야할지 알 수 없었기 때문이다. 그래서 Q-value값을 아래와 같이 정의한다.
- 이렇게 식을 설계하면 수집된 sample의 action이 optimal한 action과 같은 경우 0이 되어 학습은 만 이루어진다.
- 즉 Q-value값을 target값에 일치시키기 위해서값을 변화시킨다.
- Advantage function은 sample 데이터가 최적의 action이 아닌 경우만 target 방향으로 학습이 이루어진다.
🧐 그렇다면 어떻게 이 방식으로 값이 값에 근사되도록 한다는 논리적 근거가 있을까?
-
Q-value 에 대한 의 기울기는 항상 1이므로 는 의 차이를 대부분 그대로 가져와 학습한다.
-
는 optimal한 action과 차이가 있을 경우 학습이 이루어지며 target value에 대하여 현재 optimal advantage와의 오차를 학습합니다.
-
따라서 Q-value의 값은 대부분 state-value값을 통해 학습이 이루어져 값이 값의 주된 가치를 학습하게 됩니다.
🔻 Max값을 쓰는 것의 한계
- 주어진 state에서 optimal한 action을 사용하는 것은 큰 변동성을 야기한다.
- 이는 학습의 불안정성으로 이어진다.
4️⃣ 개선된 Aggregating module

🔷 Mean을 사용한 Aggregating module
- Max 대신 mean을 사용하기 때문에 에서 더 작은 값을 빼준다.
- 그 차이만큼 오차가 발생하지만 기본적으로 mean값이 더 변동성이 적기에 안정적인 학습이 가능하다.
- 또한 오차가 발생하더라도 Q-value는 그 값 자체보다 상대적 크기를 통해 optimal action을 선택하기 때문에 문제가 없다.
5️⃣ 정리
🔷 20강에서 배운 내용은 아래와 같다.
- Dueling DQN의 구조에 대해 배웠다.
- Dueling DQN에서 발생할 수 있는 Identifiability Issue에 대해 배웠다.
- Identifiability Issue를 해결하기 위한 Aggregating module에 대해 배웠다.
- 안정적인 학습을 위한 개선된 Aggregating module에 대해 배웠다.

I'm curious about AI