카메라
-
게임이란 월드 공간을 시뮬레이션 하는 것이 아닌 플레이어를 대표하는 가상 공간의 아바타가 월드 공간을 탐험하는 형태로 구성되는 것이 일반거
-
이러한 탐험은 보통 아바타를 중심으로 일정 영역 내 위치한 시야 영역을 모니터 화면에 표시하는 형태로 구현되며 이는 월드 공간의 일부분을 화면에 표현하는 방식으로 구현
-
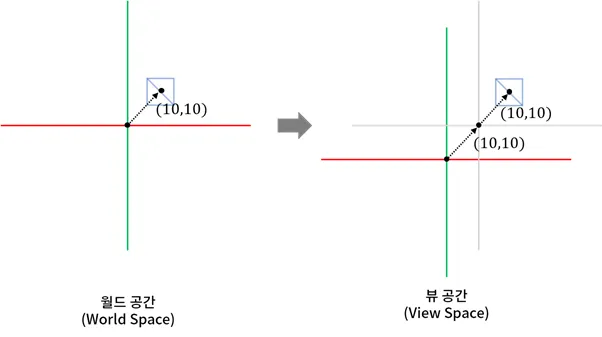
이렇게 월드 공간의 일부를 화면에 보여주기 위해 월드 공간을 재배치한 공간을 뷰 공간이라 함
- 월드 공간만 있는 경우
- 뷰 공간을 추가한 경우
뷰 공간
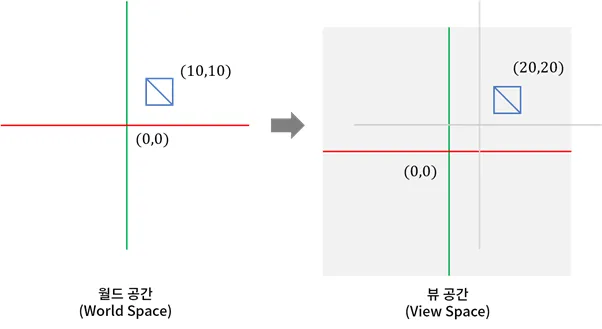
- 카메라를 원점으로 월드 공간을 재배치한 공간을 의미
- 다음과 같이 카메라가 (−10,−10)에 있을 때 카메라를 원점으로 하는 물체의 위치는 (20,20)이 됨
-
왜 (20,20)이 되는지 메커니즘을 분석하면 다음과 같음
- 기존 월드 공간을 기준으로 하는 카메라 위치를 역으로 계산한 값에 물체의 위치를 더하면 됨
(20,20)=−(−10,−10)+(10,10)
-
위의 식을 분석하면 위치에 대한 역은 이동 역행렬로 계산할 수 있으며 벡터의 덧셈은 이동 행렬의 곱셈으로 표현 가능
-
따라서 위 식은 다음과 같은 행렬로 표현이 가능
V=Tc−1⋅To
뷰 행렬의 계산
- 게임 오브젝트의 모델링 행렬은 다음과 같이 지정되며 메시 데이터의 한 점이 화면에 나타나기까지는 다음의 변환 과정을 거침
vworld=M⋅vlocal=TRS⋅vlocal
- 여기서 카메라 오브젝트가 주어진다면 카메라 오브젝트의 트랜스폼을 기반으로 월드의 점은 다음과 같이 변환 가능
vview=Tc−1⋅vworld=Tc−1⋅TRS⋅vlocal
0 위의 Tc−1에 해당하는 행렬을 뷰 행렬이라고 하며 카메라의 트랜스폼 정보가 있으면 생성 가능
vview=V⋅M⋅vlocal=V⋅TRS⋅vlocal
-
만일 카메라가 이동 외에도 회전 기능이 들어있다 가정
-
카메라의 회전하면 플레이어의 입장에서는 반대로 회전하는 것으로 보여짐
-
따라서 회전 기능이 들어가는 카메라는 다음과 같이 해석될 수 있으며 이는 트랜스폼에 역행렬을 취한 결과와 동일
-
하지만 카메라의 경우 스케일이 의미가 없으므로 다음의 수식으로 정리 가능
vview=V⋅M⋅vlocal=(TcRc)−1⋅M⋅vlocal=Rc−1Tc−1⋅TRS⋅vlocal∴V=Rc−1Tc−1
- 카메라 트랜스폼으로부터 회전까지 감안해 생성되는 뷰행렬은 다음과 같이 계산 가능
R−1=RT=⎣⎢⎡cosθ−sinθ0sinθcosθ0001⎦⎥⎤T−1=⎣⎢⎡100010−tx−ty1⎦⎥⎤V=R−1T−1=⎣⎢⎡cosθ−sinθ0sinθcosθ0−(txcosθ+tysinθ)−(−txsinθ+tycosθ)1⎦⎥⎤
- 다음과 같은 로직으로 씬에 속한 최종 게임 오브젝트를 렌더링
- 카메라로부터 뷰 행렬(V)을 구해 계산한다.
- 씬에 속한 모든 게임 오브젝트를 순차적으로 순회한다.
- 게임 오브젝트의 모델링 행렬(M)을 계산한다.
- 뷰 행렬과 모델링 행렬을 곱한 결과를 최종 행렬로 저장한다. Tfinal=V⋅M
- 최종 행렬과 메시의 정점을 모두 곱한다. vview=Tfinal⋅vlocal
- 변환된 정점으로부터 삼각형을 생성하고 이들을 각각 칠한다.