- 정의
Bundle Adjustment는 여러 뷰에 걸쳐 관측된 2차원 특징점들이 3차원 구조와 카메라 파라미터를 동시에 일관되게 설명하도록 reprojection error를 최소화하는 비선형 최소제곱 문제 (보통 Gauss-Newton, Levenberg-Marquardt를 사용합니다.)
-
설명
정의만 봐서는 이해하시기어려울 것입니다.
쉽게 설명을 하자면 우리는 카메라로 SFM, Visual slam 등으로 point cloud 형태의 depth를 얻게됩니다.
이것은 추정치이기 때문에 완벽하게 계산할 수가 없습니다. 이렇게 얻은 point cloud를 finetuning해준다고 생각해주시면 됩니다. 얻은 point cloud를 pose 별로 projection하여 내가 진짜 찍은 이미지와 비교를 하고 그것이 정확하게 거의 일치할 때까지 pose와 point cloud를 최적화해주는 것입니다.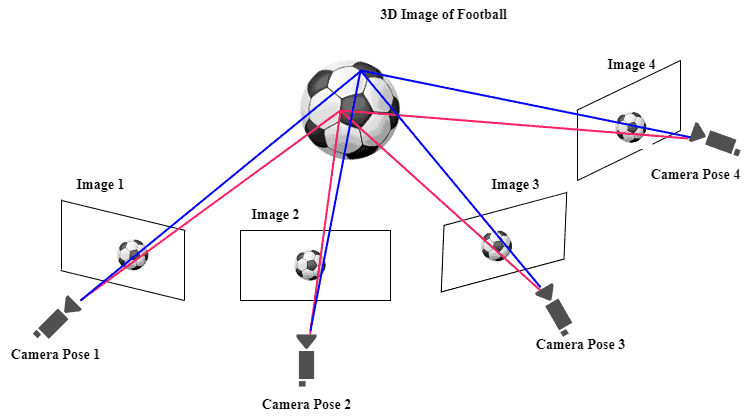
구한 depth를 projection하여 실제로 이 depth를 이 카메라로 측정하면 이렇게 나오는지 확인!!
- 수학적 공식
어렵게 생각하지 마시고 결국은 내 카메라 포즈에서 이 점을 관측했을 때 진짜 이렇게 나오는지 확인을 하고 가장 잘 들어맞을 때까지 pose와 point를 최적화하는 과정입니다.
행렬 계산을 통해 이 두가지 변수를 동시에 최적화할 수 있습니다!
- 결론
카메라를 이용하여 3d reconstruction을 할 때 전통적 기법은 point cloud를 생성합니다.
이것을 더 정확하게 하기 위해 BA를 사용하고 이것은 거의 모든 visual slam에서 사용하는 finetuning 최적화입니다.
이것도 초기값이 매우 중요하기 때문에 초기 포즈가 어느 정도 맞아야한다는 주의점을 갖고 있습니다.
SFM과 연계해서 공부하면 더욱 큰 도움이 될 것입니다.

student