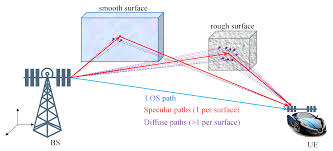
Multi-Path
-
정의
-
동일한 물체나 환경 요소가 센서 반사, 투과, 굴절 등의 원인으로 인해 여러 경로를 통해 감지되면서, 잘못된 위치나 형태로 인식되는 문제
-
센서가 직접 관측한 것이 아닌, 간접 반사/ 투과한 신호를 기반으로 잘못된 맵/위치 정보를 생서하게 하며, SLAM의 정확도를 저하시킴
-
-
주요 원인
-
반사체: 유리, 금속, 물 등에서 발생하는 센서 신호 반사
-
굴절/투과: 초음파/레이저가 반투명 재질을 통과하거나 굴절
-
센서 특성: LiDAR, Radar는 강한 반사나 간섭에 민감
-
도심/실내 환경: 다중 반사와 정렬된 구조물이 Multi-path 문제 증폭
-
-
SLAM 시스템에 미치는 영향
-
Map Distortion: 잘못된 거리 측정으로 인한 Ghost wall 생성
-
Pose Drift: 잘못된 feature로 인한 Pose 업데이트
-
Wrong Loop Closure: 반복 장소를 잘못 인식하거나 놓침
-
Feature Mismatch: 반사/유사 구조로 인해 잘못된 특징점 대응
-
-
해결 방법
-
센서 융합: 카메라, LiDAR, IMU 등의 융합으로 신뢰도 보완
-
Outlier 제거(RANSAC등): 비정상 관측값을 필터링하는 정합 알고리즘 적용
-
반사 강도 필터링: 강한 반사 값을 기반으로 잘못된 포인트 제거
-
학습 기반 반사 제거: 딥러닝으로 실제/가짜 관측 분리
-
환경 기반 마스킹: 반사가 많은 구역을 SLAM 입력에서 제거하거나 가중치 낮춤
-
Temporal Consistency Check: 시간 순 연속성 기반으로 반사로 인한 갑작스러운 점 제거
이런 문제가 있다고 하는데 저는 아직까지는 물류환경이나 dataset 기반으로 실험을 했기 때문에
아니면 알고리즘의 좋은(?) 필터링 기능 덕분에 아직 크게 느껴보지는 못했고 이러한 걸 더 반영해야되겠다고 배웠습니다. -
