주요 센서
이 질문이 들어온다면 모두들 2가지 센서를 가장 먼저 떠올릴 것입니다.
하나는 LiDAR이고 나머지 하나는 카메라입니다.
이것들은 SLAM을 구동하기 위한 눈이 되기 때문에 필수적으로 필요한 센서입니다.
센서에 따라 LiDAR SLAM, Visual SLAM으로 나눌 수 있습니다.
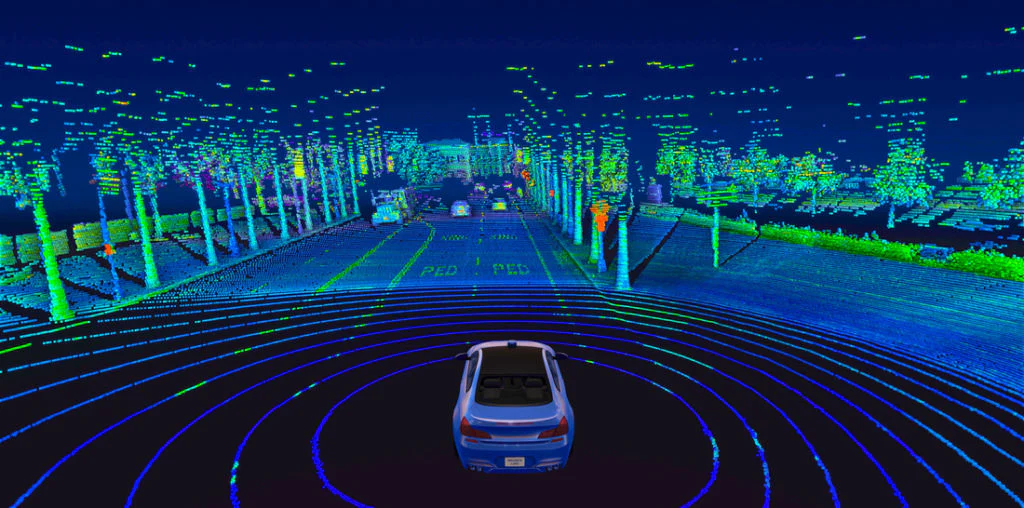
1. LiDAR
LiDAR는 적외선 레이저를 쏘아 반사되어 돌아오는 시간을 측량하여 거리를 재는 센서입니다.
LiDAR의 장단점
-
장점: 매우 높은 정확도와 정밀도로 3D 데이터를 생성하며, 날씨와 조명 조건의 영향을 적게 받습니다.
-
단점: 고가의 장비이며, 레이저가 투과하지 못하는 물체는 감지할 수 없습니다.
2. Camera
카메라 센서는 이미지 또는 비디오를 캡처하기 위해 빛을 감지하고 이를 디지털 신호로 변환하는 장치입니다. 기본적으로 렌즈를 통해 들어온 빛이 센서에 닿으면 센서가 이를 전자 신호로 변환하여 디지털 이미지를 생성하는 구조입니다.
Camera의 장단점
-
장점: 고해상도 이미지와 색상 정보를 제공합니다.
-
단점: 카메라는 빛에 의존하기 때문에 어두운 환경에서는 성능이 저하됩니다,
비, 안개, 눈과 같은 기상 조건이 센서에 영향을 미쳐 이미지 품질이 떨어지거나 인식이 어려워질 수 있습니다. 단일 카메라로는 정확한 거리 정보를 얻기 어렵습니다.
사용할 수 있는 센서
IMU - inertial measurement units
각속도와 선형 가속도를 포함하는 센서입니다.
- 장점
- 비교적 저렴한 가격
- 높은 sensitivity
- 높은 FPS(100Hz부터 더 높은 Hz의 상품들이 많습니다.)
- 단점
-
오류가 축적되어 drift가 발생할 수 있습니다.
-
가격대에 따라 성능이 천차만별입니다.
Wheel Encoder
바퀴의 회전량을 (RPM)과 이동량을 측정하는 센서
- 장점
- 저렴하다.
- 단점
-
Drift에 약합니다.
-
바퀴의 둘레가 일정하지 않음(온도에 의한 팽창, 바람 빠짐 등에 의해)
-
바퀴가 헛돌 경우 잘못된 정보를 제공
GNSS - Global navigation satellite system
비콘 기반의 위치추정 센서입니다.
다수의 비콘에 대한 통신 시간에 대한 차이를 활용하여 localization할 수 있는 센서
- 장점
- 저렴하다.
- 단점
-
오차가 크다.
-
실내/지하에서는 신호를 아예 받을 수 없음
RADAR - Radio detection and ranging sensor
전파를 이용해서 주변 환경에 반사되어 돌아오는 전파를 측정하여 거리를 재는 센서
- 장점
- 날씨의 영향을 잘 받지 않습니다.
- 타 센서에서 얻지 못하는 속도값을 얻을 수 있습니다.
- 단점
- 작은 물체들은 관측 못할 수 있습니다.
- LiDAR보다 해상도가 낮습니다.
- 주변 벽이나 바닥에 대해 multi path 문제가 있을 수 있습니다.
IMU는 아주 많이 쓰는 것 같고 나머지는 추가할 때 손익을 잘 따져야 할 것 같습니다.
