이 게시글은 장형기 님의 SLAM 기술 면접 질문 100선에 대한 제 나름대로의 답을 정리한 것입니다.
SLAM을 할 때 바닥을 추출하면 많은 것이 편해집니다.
Coordinate의 한 축이 고정이 되면 자연스럽게 자유도가 줄어 matching이 간편해지기도 하고
바닥과의 관계를 통해 물체를 판별할 수도 있습니다.
카이스트에서 바닥을 추출하는 알고리즘인 Patch work도 있어서 활용할 수 있습니다.
근데 이건 실제로 사용했을 때 벽도 추출되어서 못 썼던 기억이 있네요.. 제가 잘못한 것일 수도 있습니다.
Point Cloud 기반의 바닥 검출
- RANSAC을 이용한 바닥면 추출
- RANSAC을 이용하게 되면 point cloud 중 임의의 점 3개를 골라 평면 방정식을 추정하고, 이 평면에 잘 부합하는 점들의 개수를 확인
- 여러번 반복하여 가장 많은 inlier를 가진 평면 모델을 찾음
- 계산 속도와 구현 난이도가 적절하여 실시간 처리가 가능
- Hough Transfrom 기반
-
2D 영상 선분 검출에 쓰이는 허프 변환의 개념을 3D에 확장한 방식
-
공간에서 평면 방정식의 파라미터를 누적하여 가장 많은 포인트가 일치하는 평면을 검출
-
많은 누적 정보를 필요로 하기 때문에 메모리가 많이 들고, 파라미터 양이 많아 연산량이 큼
- PatchWork
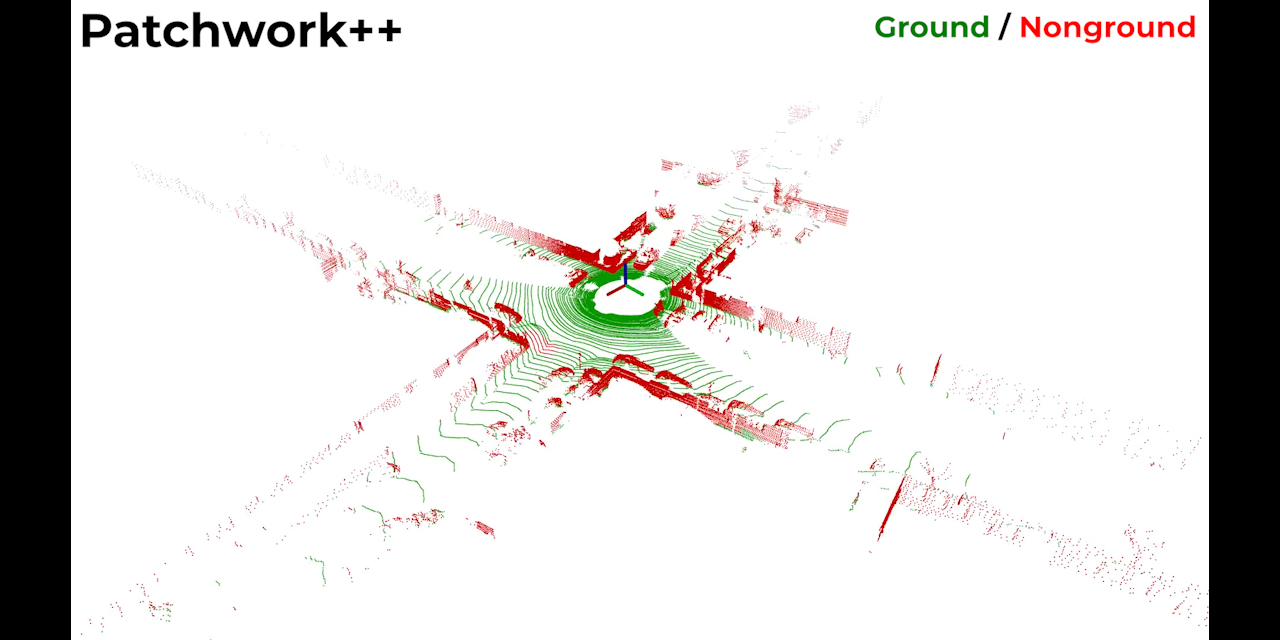
- 여러 점을 샘플링하여 바닥의 normal vector를 구합니다.
- 각 point의 normal vector와 내적을 통해 일정 threshold이하의 값을 도출하는 point를 바닥 point로 설정
- 내적 후 비교하는 간단한 알고리즘이기 때문에 실시간성 보장
RGB 영상 기반 바닥 검출
-
이미지 feature 기반
카메라 내부 파라미터와 바닥면에서의 특징점을 알고 있으면 homography 변환을 통해 바닥면의 위치나 기울기를 추정 가능 => 카메라와 바닥면 사이의 기하학적 관계를 모델링하여 추정
-
영상 내 특징 기반 분류
바닥면이 다른 객체와 색상이나 텍스처가 다르다면, 2D 이미지 상에서 바닥 영역을 분류
-
PlaneNet, PlaneRCNN 등 네트워크 사용
이미지를 입력으로 받아 장면 내 여러 평면들을 동시에 검출하고, 각 평면의 방정식을 추정하는 모델을 사용
카메라를 사용한다면 network 사용하는게 제일 효율적일 것 같긴 합니다.
point cloud에서는 RANSAC도 효율적이지만 반복적인 sampling을 해야하기 때문에 속도 문제가 조금 있고
Patchwork는 논문을 읽어 봤을 때 매우 효율적이고 직관적인 아이디어를 가지고 있었습니다.
아직 더 많은 기법이 있을텐데 제가 알고 있는 것은 여기까지입니다.
