이번 프로젝트에서 컨셉을 잘못 생각한 부분이 있었다.
해양에서는 노트북이나 다른 PC는 연결하지 않고 전원이 입력되면 바로 작동이 되도록 구현하여야 했었는데,
PC를 연결한다는 가정하에 코드를 작성하였기 때문에 다시 메뉴얼 모드와 오토 모드를 분리하여 작성하여야 했다.
[메뉴얼 모드]
메뉴얼 모드는 필수적이지만 제작하는 것이 꽤나 까다롭다. 우선 모든 동작을 설정할 수 있어야하기 때문에 작동 코드 내에서 변수를 설정할 수 없고, 텍스트 파일로 저장하여서 실시간 또는 Default값으로 계속 저장되어야 한다.
구동 조건
- 메뉴얼 모드에서는 변수를 입력받아서 피코 안의 핀 설정이나 보드 레이트와 같은 변수들을 직접 수정하여서 오토 모드로 구동하였을때 해당 변수대로 작동할 수 있도록 하여야한다.
- 모터를 수동으로 방향키와 같은 것들을 이용하여서 동작시킬 수 있도록 한다.
- 원점을 현재 지점으로 설정할 수 있어야한다.
- 센서 데이터 값을 그래프로 다이나믹하게 출력할 수 있어야한다.
- 모터의 진행방향이나 위치를 실시간으로 확인할 수 있어야한다.
동작 시나리오
메뉴얼 모드로 진입시에 시리얼 통신을 통해서 진입할 수 있도록 한다.
피코에 전원이 들어오면 지정한 대기 시간동안 시리얼 통신으로 메뉴얼 모드라는 것을 통신받으면 메뉴얼 모드로 접근한다.
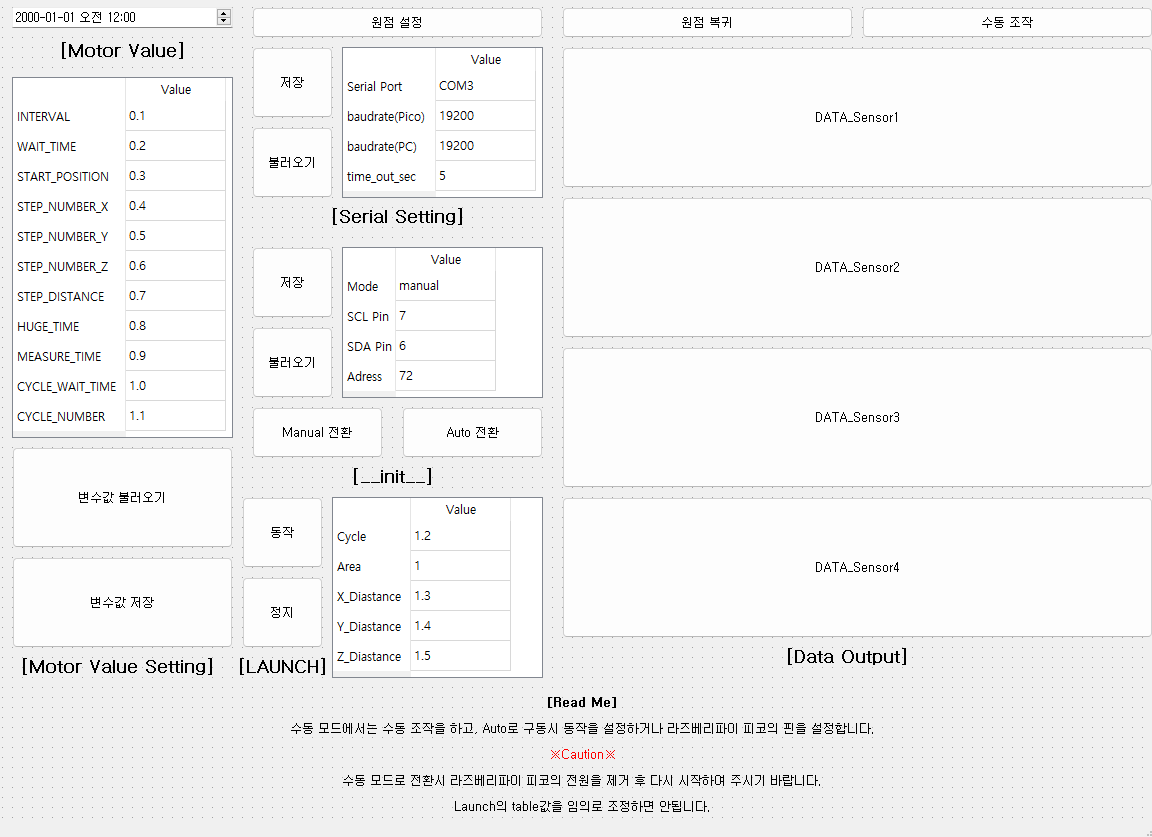
GUI 구성
[오토모드]
사실상 오토모드는 메뉴얼에서 저장된 변수로 잘 굴리기만 하면된다.
현재 진행상황
현재까지는 메뉴얼 모드 진입을 구현하였다. 피코에서 5초동안 대기하고 시리얼 통신이 들어오면 메뉴얼 모드로 동작한다.

한국해양대학교/인공지능공학부