해양 수질 측정 프로젝트
1.라즈베리파이 피코

라즈베리파이 피코 개발환경 설정VScode: Pico-W-Go 확장 설치 후 라즈베리 파이 연결 완료될 시에 하단 좌측 실행 버튼 누르면 된다. 만약 작업중이었다면 피코에서 파일을 불러와 실행하면 된다.문제는 Thonny 개발 환경과 다르게 파일 생성 삭제가 바로 안되
2.하드웨어, 코드 진행
하드웨어 재결선TB6612 듀얼 DC 모터드라이브엔코더 모터(DC 12V Geared Motor / JGA 25-371)두개의 하드웨어를 라즈베리파이에 연결PWM, AIN,BIN 등등 다시 연결했음. 결선도는 솔직히 잘 이해가지 않는다. 다시 한번 확인해보자.코드 진행
3.문제해결
저번에 문제였던 하드웨어에서 문제를 해결하였다.결선 문제 해결다시 선들을 재결선하였는데 내가 엉망으로 하여서 꼼꼼히보고 다시 연결하였다.인터럽트 문제이건 단순히 코드에서 발생한 문제가 아니라 라즈베리 파이 피코에서 pwm신호를 멈추지 못해서 발생하는 문제였다. 인터럽트
4.무한 루프 해결, 그러나 코드 분할 작업에서 문제 발견
우선 무한루프 문제를 해결했다... 드디어무한루프무한루프가 도는 이유는 라즈베리 파이 피코에서 정상적으로 파워를 다운시키지 못해서였다. 그 말인 즉, pwm 신호를 죽이지 못하였다. 그래서 pwm 신호를 Keyboard Interrupt 상황에서 없에니 제대로 동작을
5.GUI와 하드웨어 설계 구상
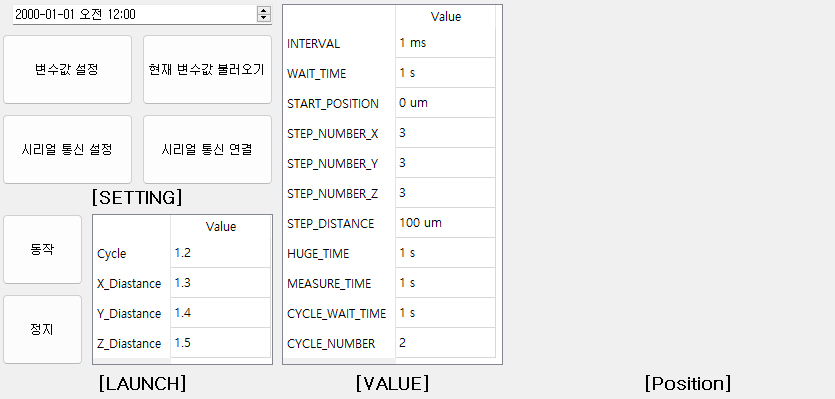
우선 이때까지 생각했던 프로젝트와 조금 다른 부분이 있었다. RS232 통신을 이용하여서 데이터를 주고 받는 형식인데 GUI를 라즈베리파이 피코 내부 함수로 돌리는 줄 알았으나 그것과 별개의 소프트웨어가 완성되어야 한다. [GUI] GUI에는 전원 공급, 변수값 설
6.Main Window, 시리얼 통신
[GUI] 현재 GUI는 Main Window에서 변수값을 설정하고 config 파일을 저장하는 것까지 완성했다. Qt Designer 툴을 사용하여 틀을 제작하였다. 이를 작동시키기 위해 Qt Desinger가 설정한 변수값에 이벤트를 설정하면 된다. 예를 들어,
7.통신 시나리오
통신을 완료하는 단계까지 코드를 작성하였지만,데이터를 맞춰보는 코드에서 데이터가 일치하지 않는다고 코드가 넘어가지 않았다.이건 단순히 데이터를 보낼때, \\n로 입력받아서 생긴 문제였다. 그래서 단순히위와 같이 strip을 해줬더니 해결됐다;;;그리고 코드가 무한 루프
8.인터럽트 진짜 에바야
현재 가장 문제되는 부분은 인터럽트 문제이다.정지 버튼을 입력할 시에 인터럽트 신호를 줘도 함수 내에서 while문이 실행되고 있어 애초에 시리얼 통신을 받지 못한다.따라서 내가 생각한 방법은 세가지이다.While문의 조건을 시리얼 통신으로 수정 위와 같이 처음부터
9.ADC 모듈, 센서값 측정
최근에 노로바이러스 크리가 터져서 엄청 아픈 휴유증으로 블로그에 많이 신경을 못썻는데 이제 다시 시작해야지... 다들 건강합니다 허허어쨋든 이제 GUI제작도 많이 완성되었고, 센서 데이터를 받아오는 것이 프로젝트의 가장 큰 목표이니 센서를 하나 둘 건드려 보기 시작했다
10.메뉴얼 모드 작성 및 GUI 재제작
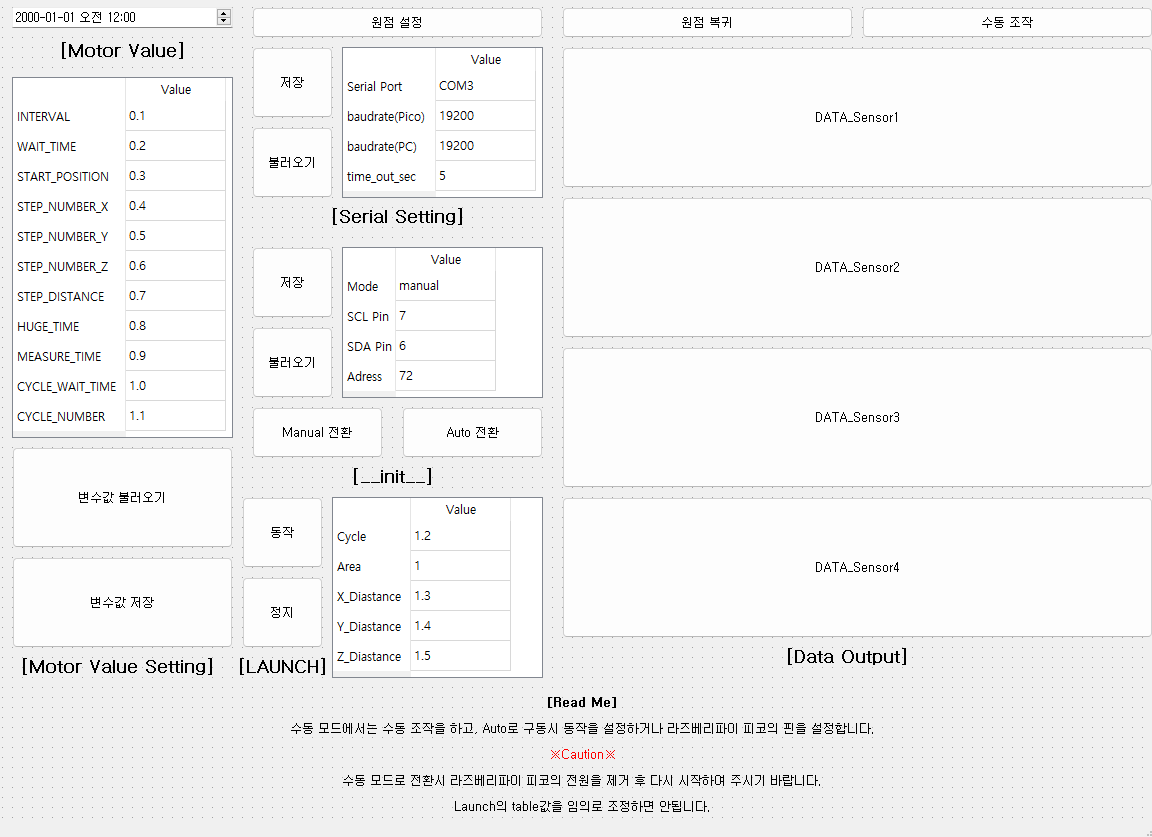
이번 프로젝트에서 컨셉을 잘못 생각한 부분이 있었다.해양에서는 노트북이나 다른 PC는 연결하지 않고 전원이 입력되면 바로 작동이 되도록 구현하여야 했었는데,PC를 연결한다는 가정하에 코드를 작성하였기 때문에 다시 메뉴얼 모드와 오토 모드를 분리하여 작성하여야 했다.메뉴