들어가기전에..
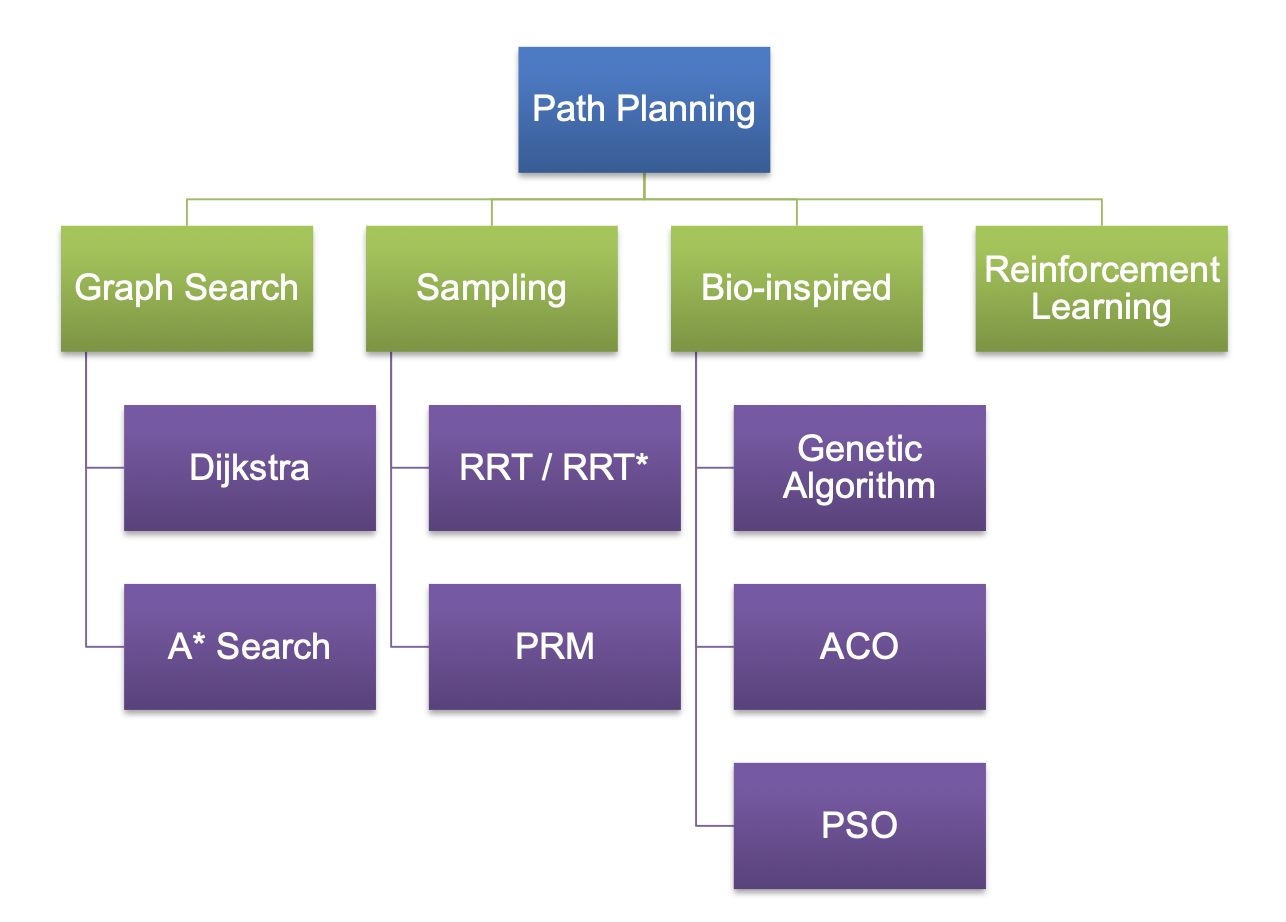
그래프 탐색 기반 경로 계획
- 지점들과 각 지점 사이의 비용을 각각 노드(Node)와 간선(Edge)를 통해 그래프 구조로 표현
그래프 구조
- 각 단위의 정보들을 연결하여 구조화시킨 자료 구조
- 노드(Node) : 각 이동 지점
- 간선(Edge) : 노드 간의 연결
- 출발 노드부터 목표 노드 사이에 통과하는 간선 상의 가중치, 즉 소요되는 비용의 합을 최소화하는 경로를 탐색
최소 비용 문제
1. 다익스트라(Dijkstra) 알고리즘
1.1 다익스트라 알고리즘이란?
- 그래프의 한 노드에서 나머지 노드까지의 최소 비용을 구하는 알고리즘
- 단, 이때 음의 간선을 포함할수 없음
- 활용분야
- 구글 맵스 및 교통 경로 시스템
- 컴퓨터 네트워크의 라우팅 경로
- 산업 공학의 최소 운송비 지점 등
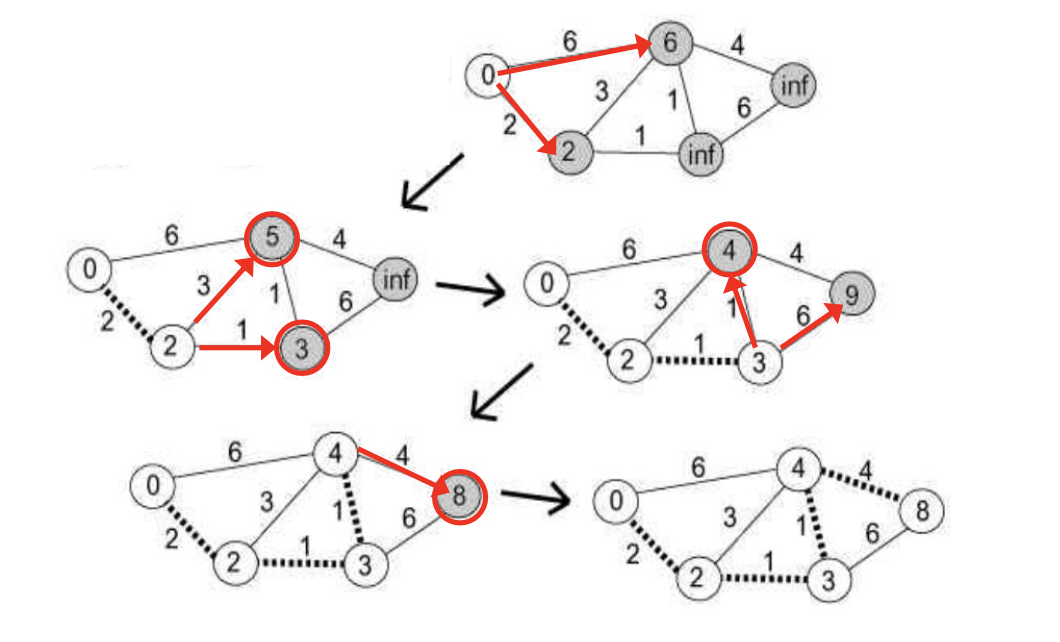
1.2 알고리즘 순서
- 출발 노드로부터 각 노드까지의 최소 비용을 저장할 배열과 방문 여부를 초기화
- 이때, 각 노드까지의 최소비용은 (무한대)로 설정한다.(이론상 최대의 값 또는 아주 큰값)
- 출발 노드의 비용과 방문 여부를 각각0과 "방문"으로 갱신한다.
- 현재 노드와 간선이 연결된 인접 노드까지의 최소 비용을 갱신한다. 각 인접 노드에 대해 다음의 값을 비교한다.
(1) : (현재 노드까지의 최소비용) + (현재 노드에서 인접 노드까지의 비용)
(2) : (인접 노드까지의 비용)
(3) : (1)과 (2)의 값을 비교하여 (1)의 값이 (2)보다 작은 경우(비용이 더 작은 경우), (1)의 비용으로 (2)의 비용을 갱신
- 현재 노드에 인접한 모든 노드에 대해 비용을 비교하여, 필요 시 갱신한다. 인접한 모든 노드에 방문 후, 방문 상태를 "완료"로 갱신한다.
- 아직 방문하지 않은 노드들 중, 비용이 가장 적은 노드를 방문하여 3~4 단계를 수행한다.
- 모든 노드를 방문할때까지 위의 과정을 반복
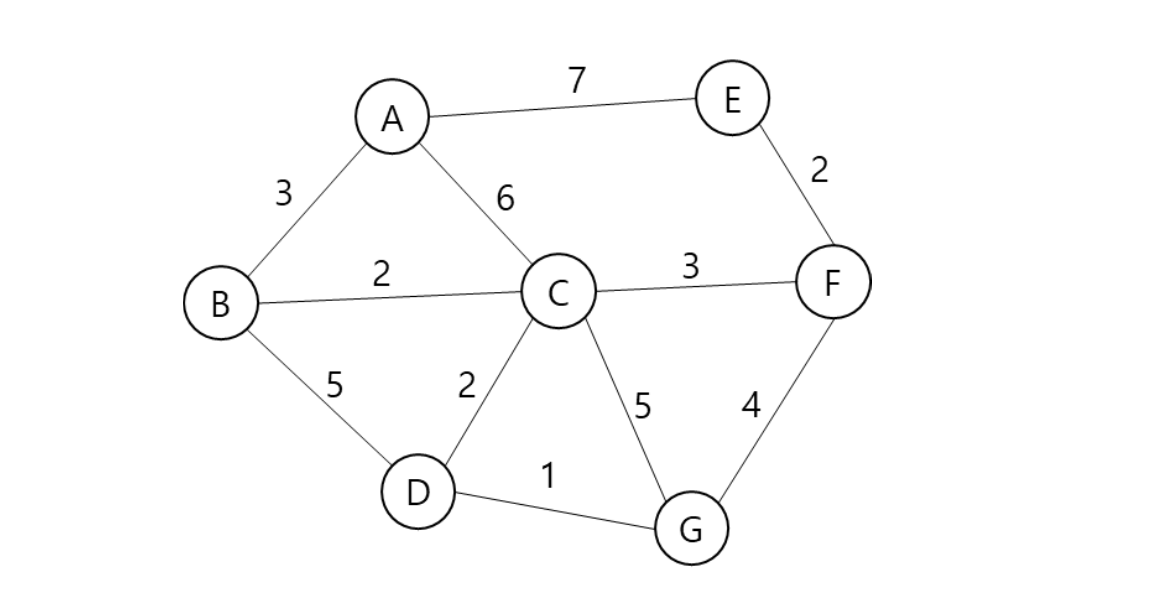
1.3 예제 문제
- 출발 노드(Start) : A
- 도착 노드(Goal) : G
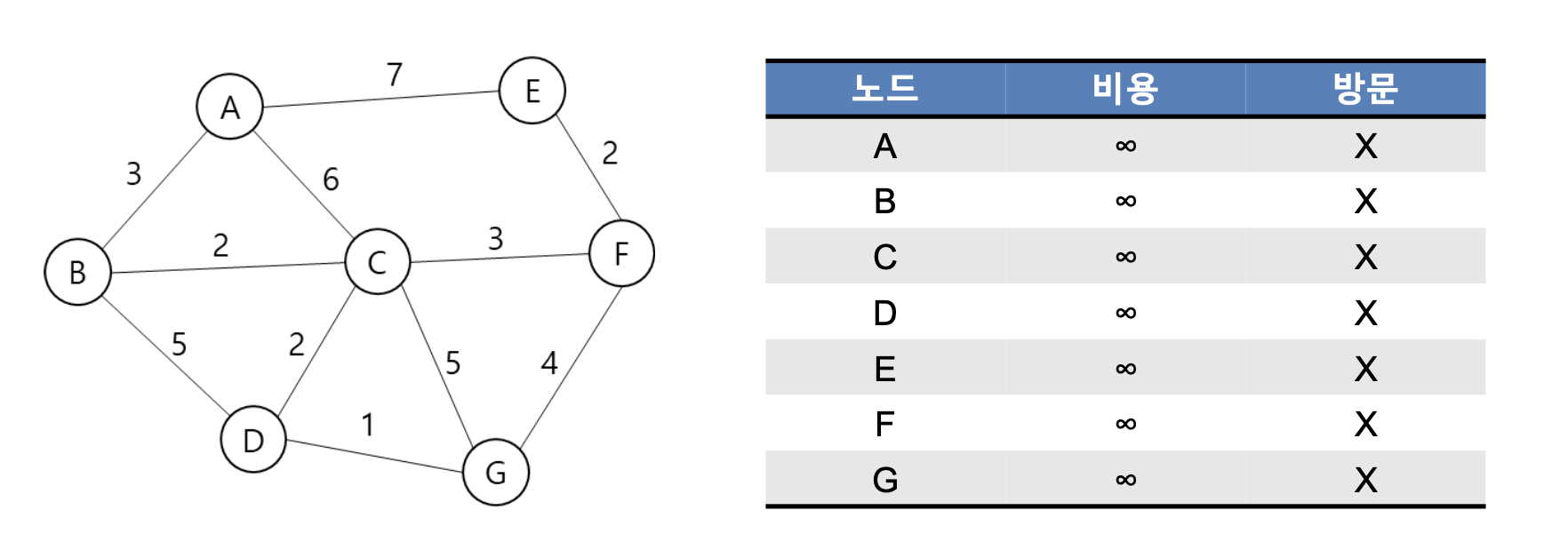
1. 초기화
- 모든 노드에 대해 INF(무한대)로 초기화
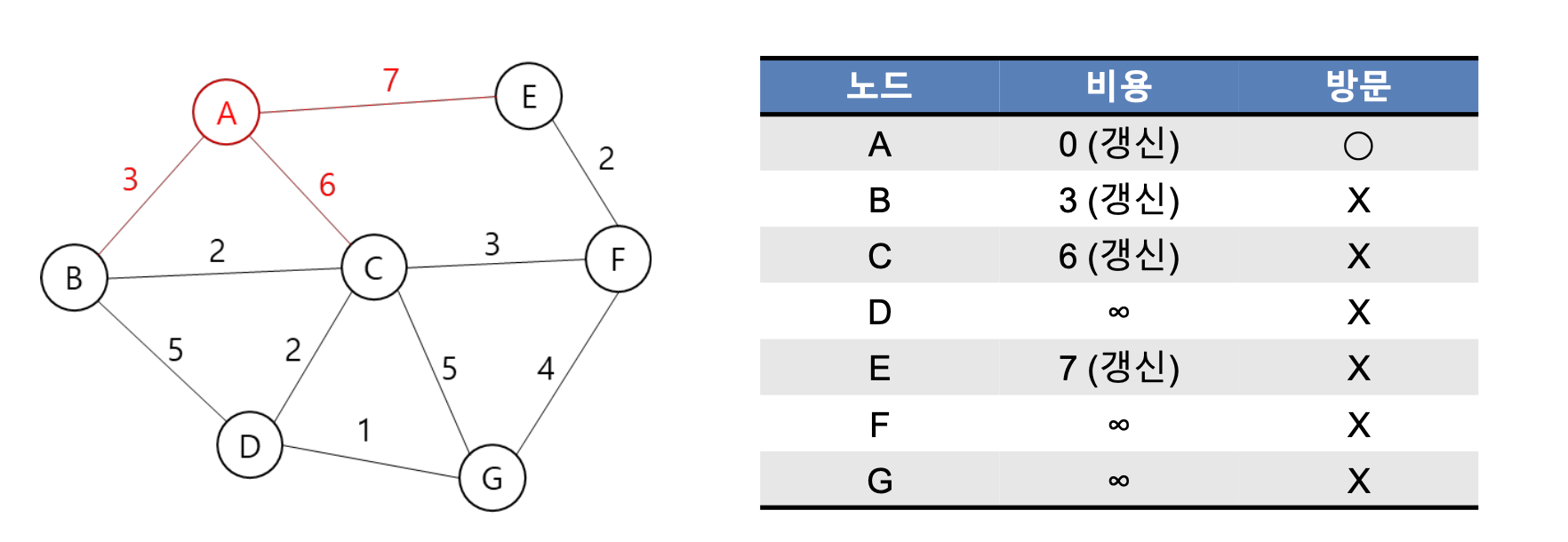
2. 노드 A
- 출발 노드(A)부터 탐색 시작
- 출발 노드의 비용을 0으로 갱신
- 인접한 노드 B, C, E 에 대해 비용 갱신
- 노드 A의 방문상태를 '방문'으로 갱신
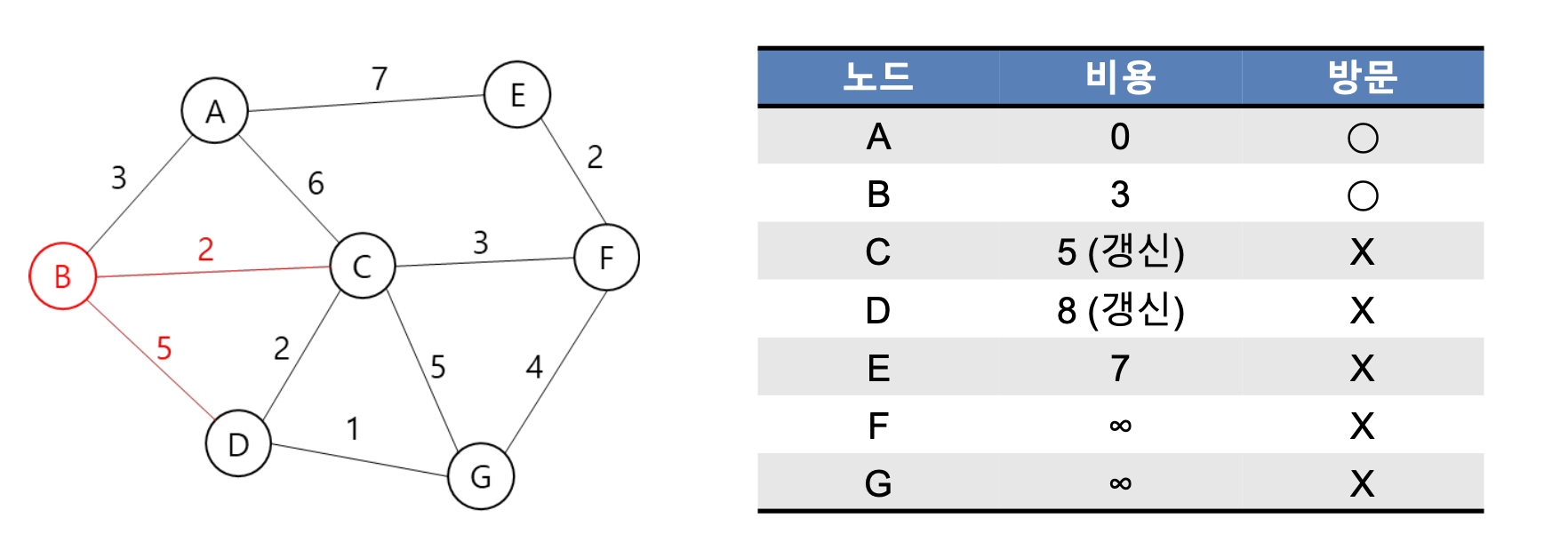
3. 노드 B
- 미방문 노드 중, 비용이 가장 작은 노드 B 방문
- 인접한 노드 C, D의 기존 경로와 새로운 경로의 비용을 비교 및 필요시 갱신
- 노드 C
- 기존 경로 : A -> C 의 비용 : 6
- 새로운 경로 : A -> B -> C 의 비용 : 5
C의 비용을 더작은 비용인 5로 갱신
- 노드 C
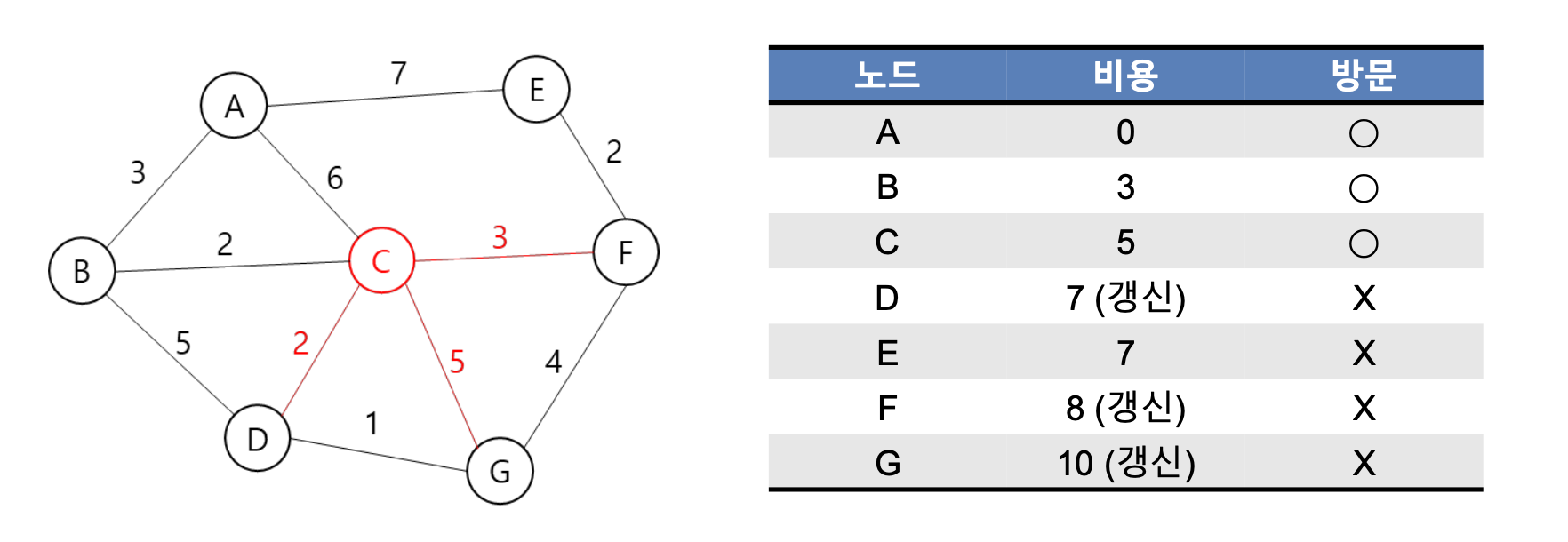
4. 노드 C
- 인접한 노드 D, F, G에 대해 비용 비교 및 갱신
- 노드 D
- 기존 경로 : A -> B -> D 의 비용 : 8
- 새로운 경로 : A -> B -> C -> D 의 비용 : 7
D의 비용을 더 작은 비용인 7로 갱신
- 노드 D
5. 노드 D
- 인접한 노드 G에 대해 비용 비교 및 갱신
- 노드 G
- 기존 경로 : A -> B -> C -> G 의 비용 : 10
- 새로운 경로 : A -> B -> C -> D 의 비용 : 8
G의 비용을 더 작은 비용인 8로 갱신
- 노드 G
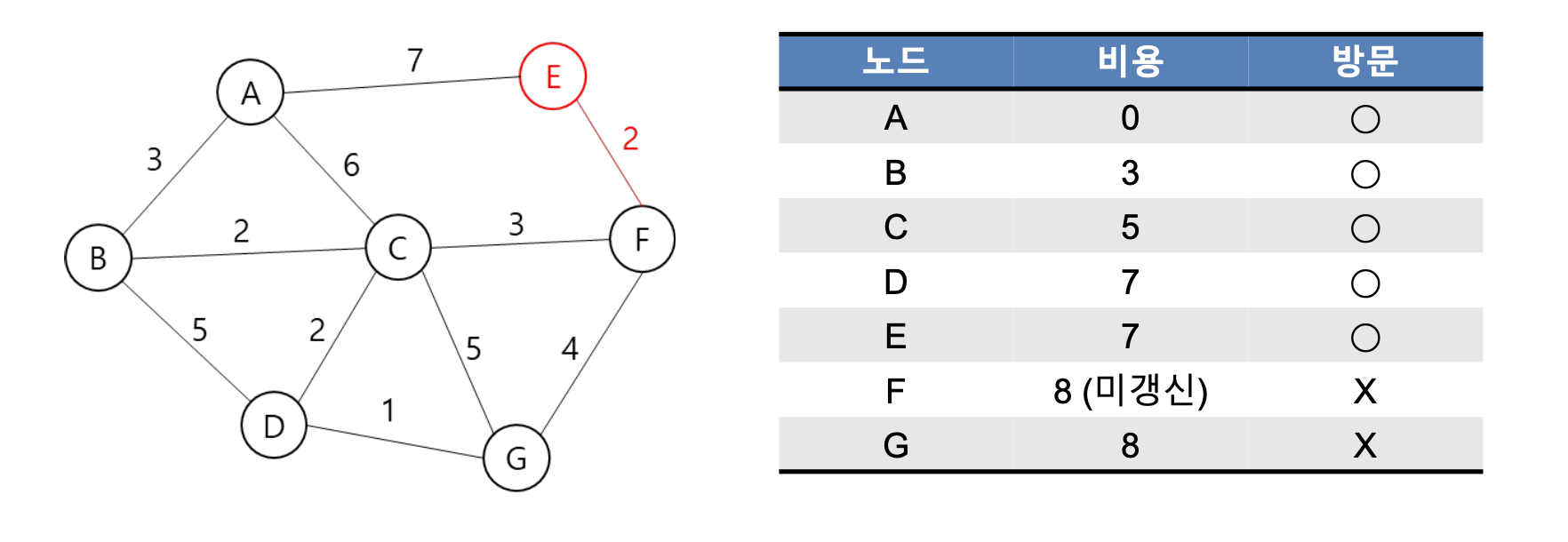
나머지 노드 E, F에 대해서도 동일하게 적용시키면 다음과 같은 결과가 나온다.
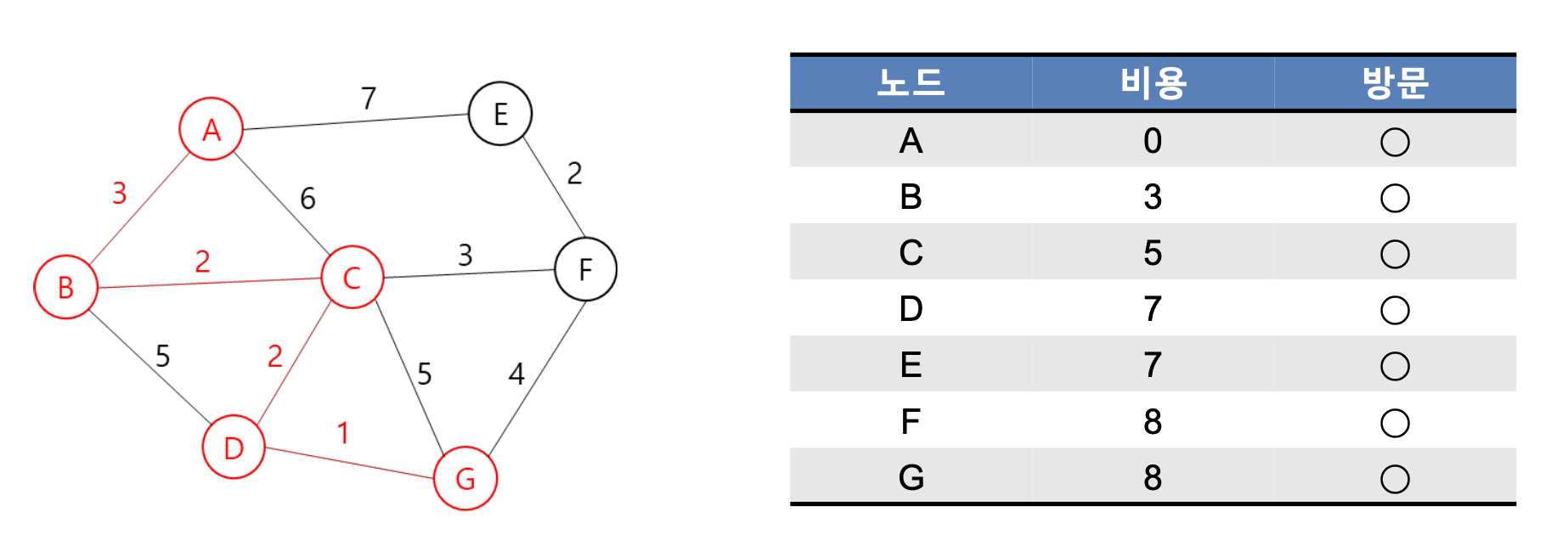
6. 최종경로
- A -> B -> C -> D -> G 총 비용 8
2. 다익스트라 알고리즘의 특징
- 최적성 보장
- 모든 노드를 방문하여 최소 비용 경로를 탐색하기 때문에, 시작 노드에서 목표 노드까지 경로의 최적성을 보장
- 구현의 용이성
- 상대적으로 알고리즘에 대한 이해과 구현이 용이
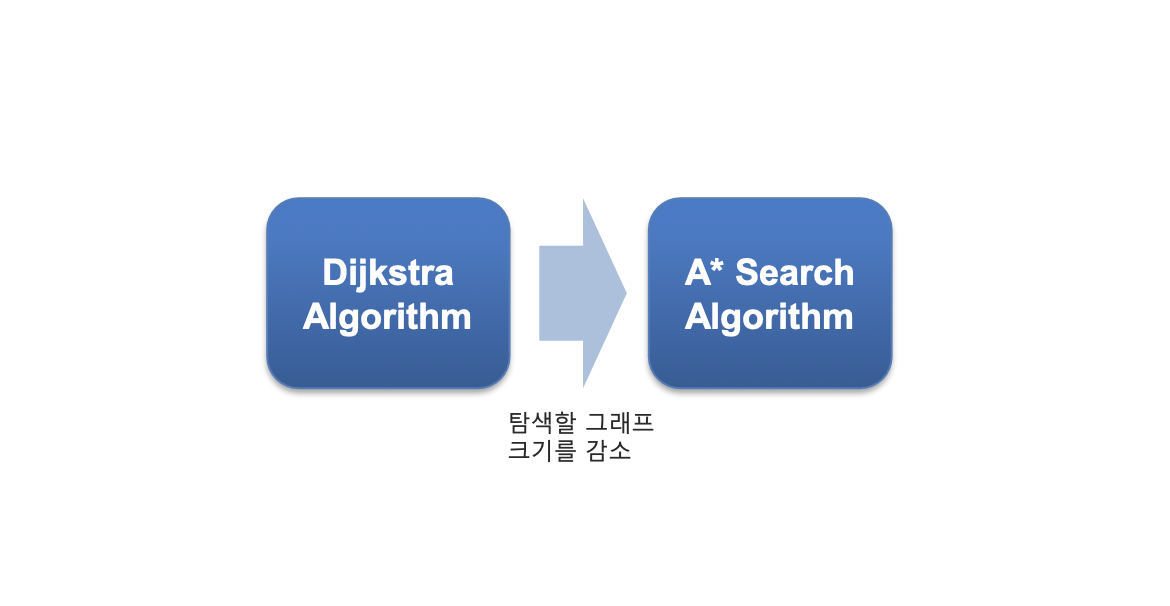
- 연산 시간
- 노드의 수와 연결 경로가 증가함에 따라 방문해야 하는 경로의 개수가 급격히 증가
- 노드와 연결 경로가 많은 대규모의 그래프 구조에서 경로를 계획해야 하는 경우, 최소 비용 경로를 도출하기 위해 많은 시간이 필요
3. 연습문제
- 시작 노드(Start) : A
- 목표 노드(Goal) : I
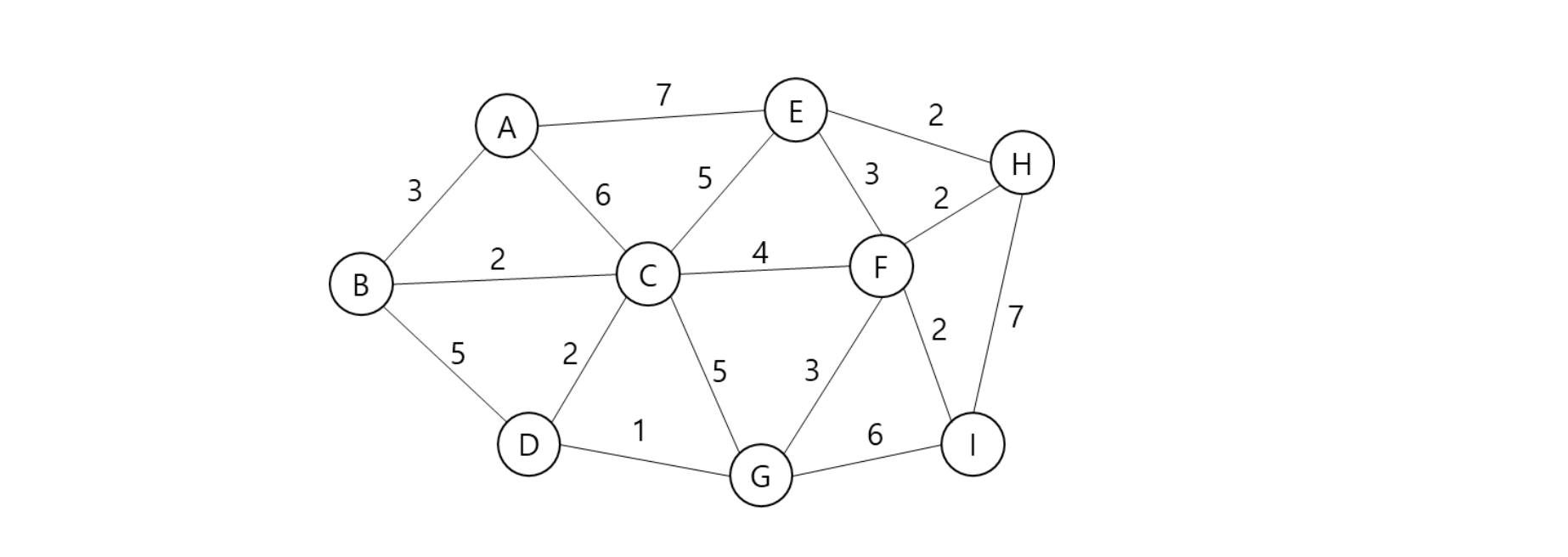
최종 경로
- A(0) -> B(3) -> C(5) -> F(9) -> I(11) 총 비용 11
4. 다익스트라 알고리즘 코드
import heapq
import matplotlib.pyplot as plt
def dijkstra(graph, start_node, end_node):
# 각 노드까지의 거리를 무한대로 초기화
distances = {node : float('inf') for node in graph}
# 각 노드의 방문 여부를 False로 초기화
visited = {node : False for node in graph}
# 각 노드의 이전 노드를 저장할 딕셔너리를 None으로 초기화
predecessors = {node : None for node in graph}
# 시작 노드까지의 거리는 0으로 설정
distances[start_node] = 0
# 우선순위 큐를 초기화하고 시작 노드를 추가
pq = [(0, start_node)]
# 우선순위 큐가 빌 때까지 반복
while pq:
# 우선순위 큐에서 가장 작은 거리의 노드를 꺼냄
current_distance, current_node = heapq.heappop(pq)
# 이미 방문한 노드인 경우 스킵
if visited[current_node]:
continue
# 현재 노드를 방문 처리
visited[current_node] = True
# 목표 노드에 도달한 경우, 최단 경로를 구하고 반환
if current_node == end_node:
path = []
while current_node:
path.append(current_node)
current_node = predecessors[current_node]
path.reverse()
return path, distances[end_node]
# 현재 노드와 이웃한 노드들을 확인하며 최단 거리 갱신
for neighbor, weight in graph[current_node].items():
distance = current_distance + weight
# 새로운 거리가 기존의 거리보다 짧은 경우 갱신
if distance < distances[neighbor]:
distances[neighbor] = distance
predecessors[neighbor] = current_node
heapq.heappush(pq, (distance, neighbor))
# 목표 노드에 도달할 수 없는 경우 None 반환
return None, None
# 주어진 그래프 정의
graph = {
'A' : {'B' : 3, 'C' : 6, 'E' : 7},
'B' : {'A' : 3, 'C' : 2, 'D' : 5},
'C' : {'A' : 6, 'B' : 2, 'D' : 2, 'E' : 5, 'F' : 4, 'G' : 6},
'D' : {'B' : 5, 'C' : 2, 'G' : 1},
'E' : {'A' : 7, 'C' : 5, 'F' : 3, 'H' : 2},
'F' : {'C' : 4, 'E' : 3, 'G' : 3, 'H' : 2, 'I' : 2},
'H' : {'E' : 2, 'F' : 2, 'I' : 7},
'G' : {'C' : 5, 'D' : 1, 'F' : 3, 'I' : 6},
'I' : {'F' : 2, 'G' : 6, 'H' :7}
}
# 각 노드의 위치 지정
# 각 노드의 위치 지정
pos = {
'A': (0, 0),
'B': (1, 1),
'C': (1, -1),
'D': (2, 1),
'E': (2, -1),
'F': (3, 0),
'G': (3, 2),
'H': (4, -1),
'I': (4, 1)
}
# 시작 노드와 목표 노드 설정
start_node = 'A'
end_node = 'E'
# 다익스트라 알고리즘을 사용하여 최단 경로와 최단 거리 계산
path, shortest_distance = dijkstra(graph, start_node, end_node)
# 최단 경로 및 최단 거리 출력
print(f"The shortest path from {start_node} to {end_node} is : {path}")
print(f"The shortest distance is : {shortest_distance}")
# 그래프 그리기
plt.figure(figsize=(8, 6))
# 간선 그리기
for node in graph:
for neighbor, weight in graph[node].items():
plt.plot([pos[node][0], pos[neighbor][0]], [pos[node][1], pos[neighbor][1]], 'k-')
# 노드 그리기
# 노드 그리기
for node in graph:
plt.plot(pos[node][0], pos[node][1], 'o', markersize=10, alpha=0.5)
plt.text(pos[node][0], pos[node][1], node, fontsize=12, ha='center', va='center')
plt.axis('off')
plt.show()실행 결과
The shortest path from A to I is : ['A', 'B', 'C', 'F', 'I']
The shortest distance is : 11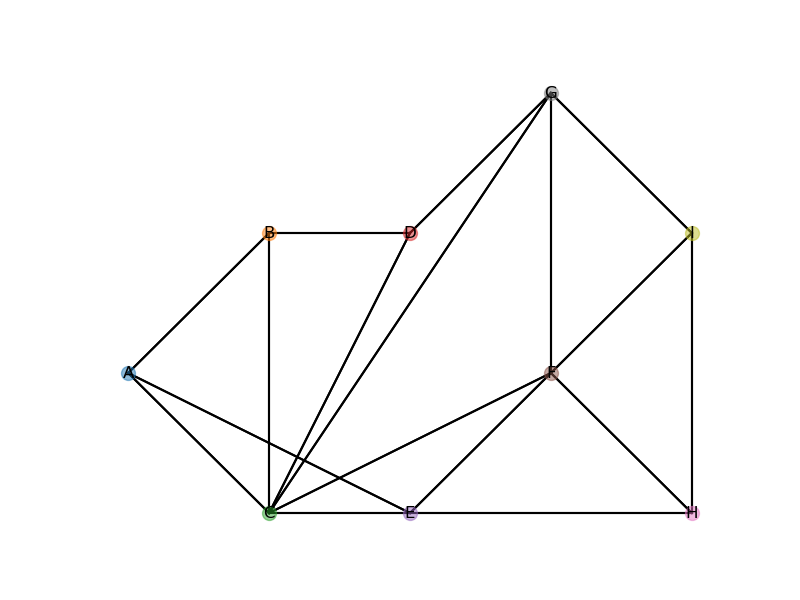

Robotics