로봇경로계획
1.지도 표현
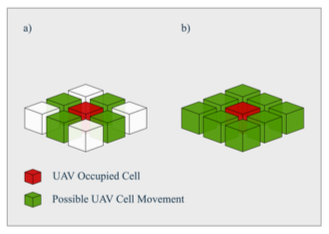
1. 지도 표현의 요소 1.1 지도 표현 시스템이 환경을 이해하고 장애물을 인식하며 경로를 계획하는 데 필요한 정보의 기반을 제공, 계획의 효율성과 정확성에 영향을 줌 1.2 지도 표현의 요소 환경 인식: 지도는 로봇이나 자율 시스템이 주변환경을 인식하고 해석함, 이
2.그래프(Graph)
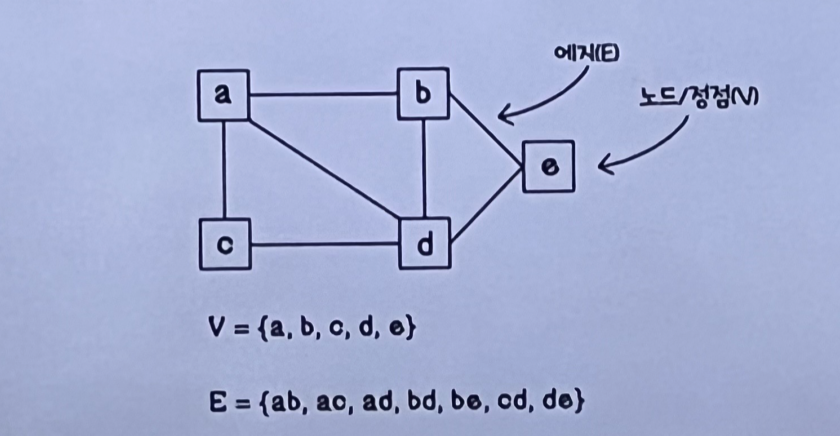
연결 관계를 갖는 상태를 포함하는 자료구조논리적 특성 및 시각적 표현 용이노드(node) / 정점(vertex) : 그래프의 각 상태에지(edge, 간선) : 두 상태 간 연결노드 간 관계를 배열의 형태로 표현 가능아래 그래프를 행렬로 표현해보자.무방향 그래프(Undi
3.트리
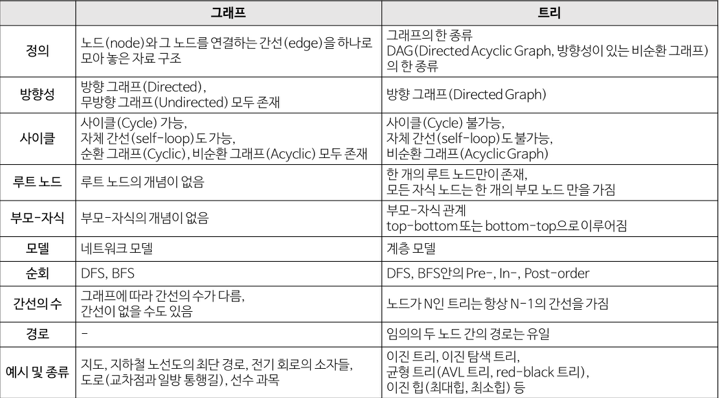
데이터와 정보 컴퓨터가 이해할 수 있는 방식으로 표현 필요 데이터(data) 가공되지 않은 어떤 사실 예) 미로에서의 개별 거리 정보(information) 특정 도메인에서 데이터에 대한 통찰력을 제공하는 사실의 해석(데이터를 의미있는 맥락으로 만듬) 예
4.깊이 우선 탐색(DFS, Depth-First Search)

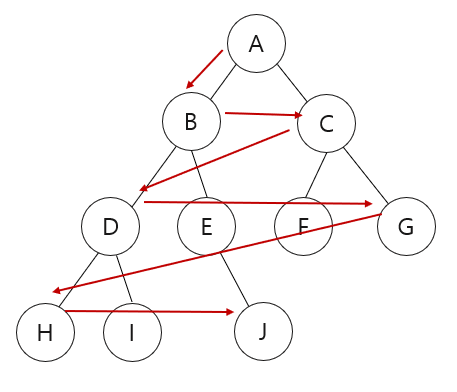
그래프 탐색이란 하나의 정점으로부터 시작하여 차례대로 모든 정점들을 한 번씩 방문하는 것 1. 깊이 우선 탐색 1. 깊이 우선 탐색이란 루트 노드(혹은 다른 임의의 노드)에서 시작해서 다음 분기(branch)로 넘어가기 전에 해당 분기를 완벽하게 탐색하는 방법 트리를
5.너비 우선 탐색(BFS)
루트 노드(혹은 다른 임의의 노드)에서 시작해서 인접한 노드를 먼저 탐색하는 방법시작 정점으로부터 가까운 정점을 먼저 방문하고 멀리 떨어져 있는 정점을 나중에 방문하는 순회 방법즉, 깊게(deep)탐색하기 전에 넓게(wide)탐색하는 것사용하는 경우 : 두 노드 사이의
6.다익스트라(Dijkstra) 알고리즘
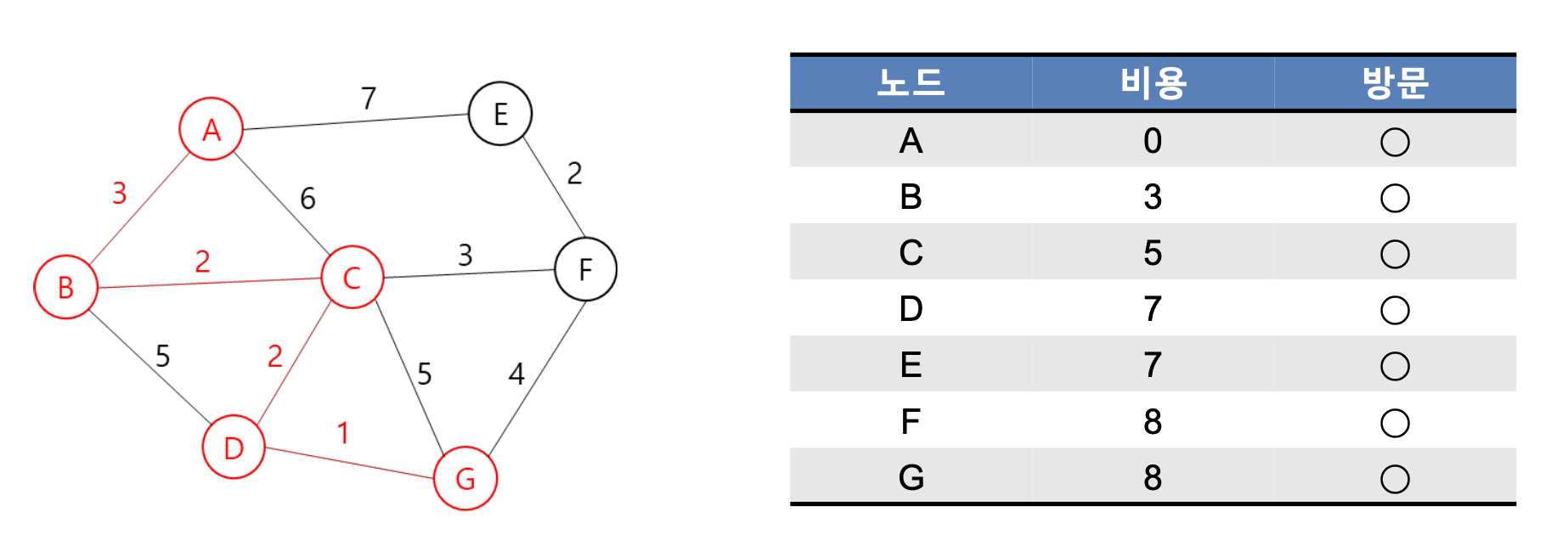
들어가기전에.. 그래프 탐색 기반 경로 계획 지점들과 각 지점 사이의 비용을 각각 노드(Node)와 간선(Edge)를 통해 그래프 구조로 표현 그래프 구조 각 단위의 정보들을 연결하여 구조화시킨 자료 구조 노드(Node) : 각 이동 지점 간선(Edge) :
7.A* 알고리즘
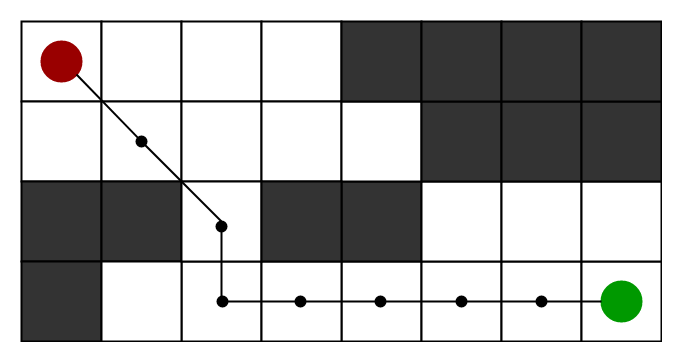
그래프 탐색 기반 경로 계획의 대표적인 알고리즘 중 하나출발 꼭짓점에서부터 목표 꼭짓점까지 가는 최단 경로를 찾아내는 휴리스틱(Heruristic) 기반의 그래프 탐색 알고리즘A\* 알고리즘의 특징은 경로 계획 시 '추정 비용(=휴리스틱)' 을 고려하여 경로 계획A\*
8.샘플링 기반 경로 계획(RRT)
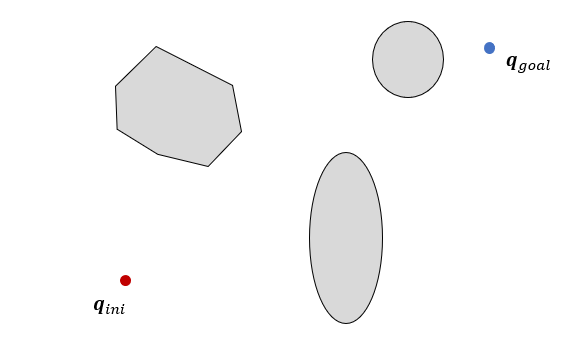
대표적인 경로 계획 방법론 중 한 분류고차원 공간에서도 짧은 시간 내에 효과적으로 적절한 경로를 찾기 위해 제안경로를 탐색할 공간을 그래프 구조나 격자(Grid)로 분할하여 나타내지 않고 자유 공간에 무작위로 생성된 포인트 중에서 랜덤하게 한 포인트를 선택하여 경로를
9.RRT-Connect
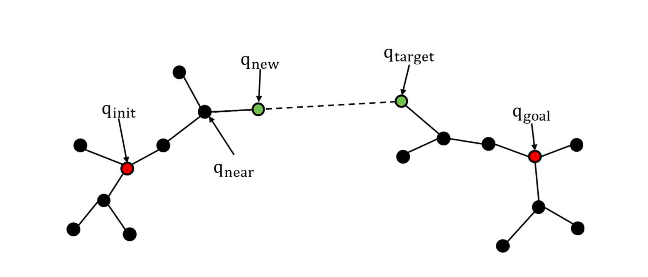
1. RRT-Connect RRT 기반의 변형 알고리즘 중 하나 시작 지점과 도착 지점에서 각각의 트리를 시작하여, 두 트리가 만날 때까지 확장하는 경로 계획 방법 1. RRT-Connect 의사코드 2. RRT-Connect 알고리즘 초기화 시작 지점 $q{ini
10.RRT* 알고리즘
1. RRT* 알고리즘에 대하여 RRT* 알고리즘은 RRT 알고리즘과 기본 뼈대는 동일하다. 다만 RRT와 두 가지 차이점이 있는데, 첫째는 부모(parent)노드의 재선정이고, 둘째는 트리의 재구성(rewire)이다. 2. RRT* 알고리즘 개요 Karaman에 의
11.PRM 알고리즘
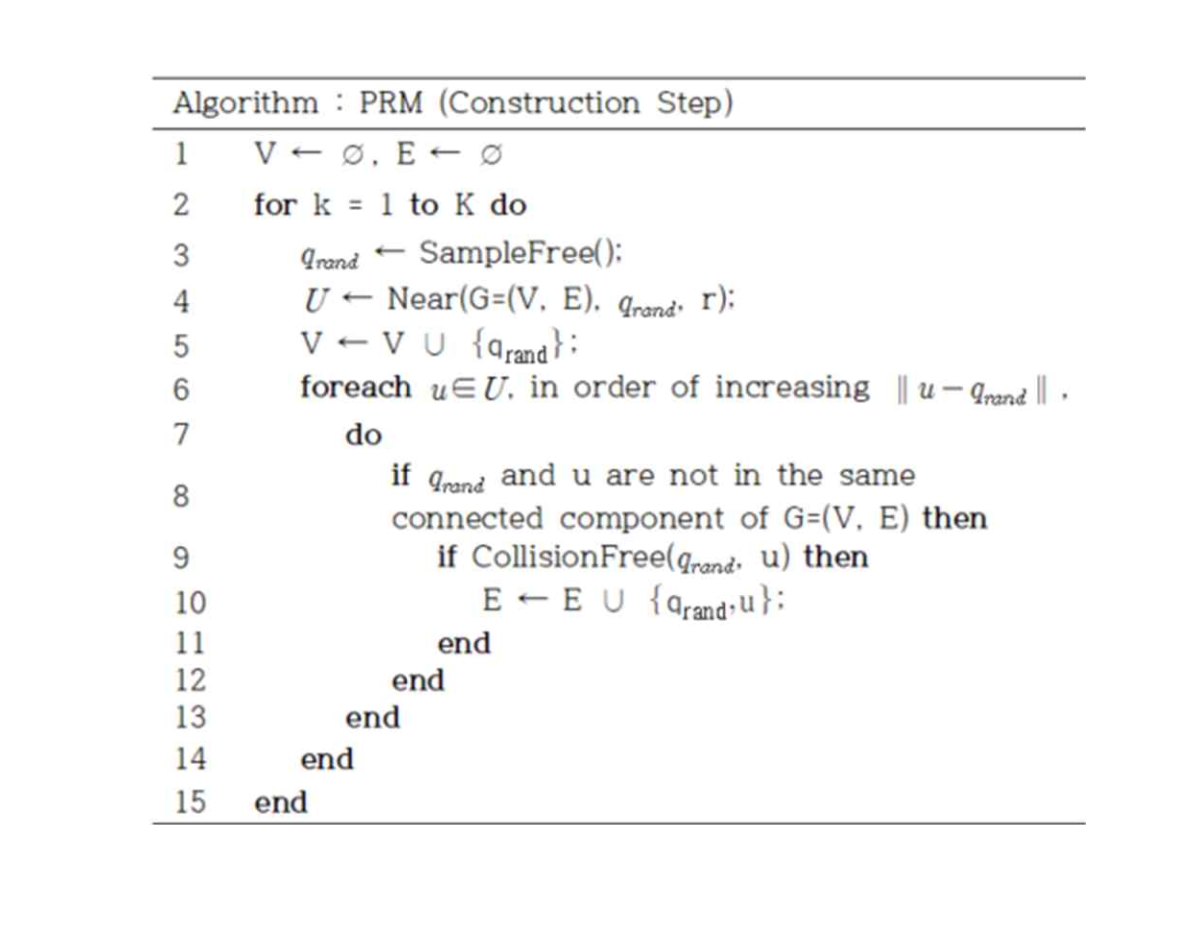
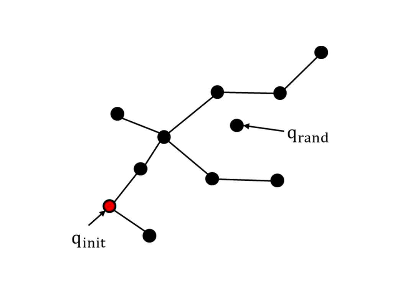
1996년 Kavraki 등에 의해 제안된 샘플링 경로 계획 방법지도 전역에서 무작위로 샘플을 추출하고, 샘플들을 연결하여 지도 전역에 대한 로드맵을 생성생성된 로드맵에 시작 지점과 도착 지점을 추가하여, 두 점을 연결하는 경로를 탐색시작과 도착 지점이 변경되더라도,
12.유전 알고리즘
자연에서 발견한 또는 생물학적 진화 등에서 영감을 받은 재료, 장치, 구조 등을 공학, 과학 등에 적용하는 것로봇4족 보행 수송 로봇(견마 로봇 등)곤충 정찰 로봇(잠자리 드론 등)재료홍합의 접착 물질을 이용한 의료용 접착제상어 비늘의 형태를 이용한 수영복 유전 알고
13.유전 알고리즘 기반 경로 계획
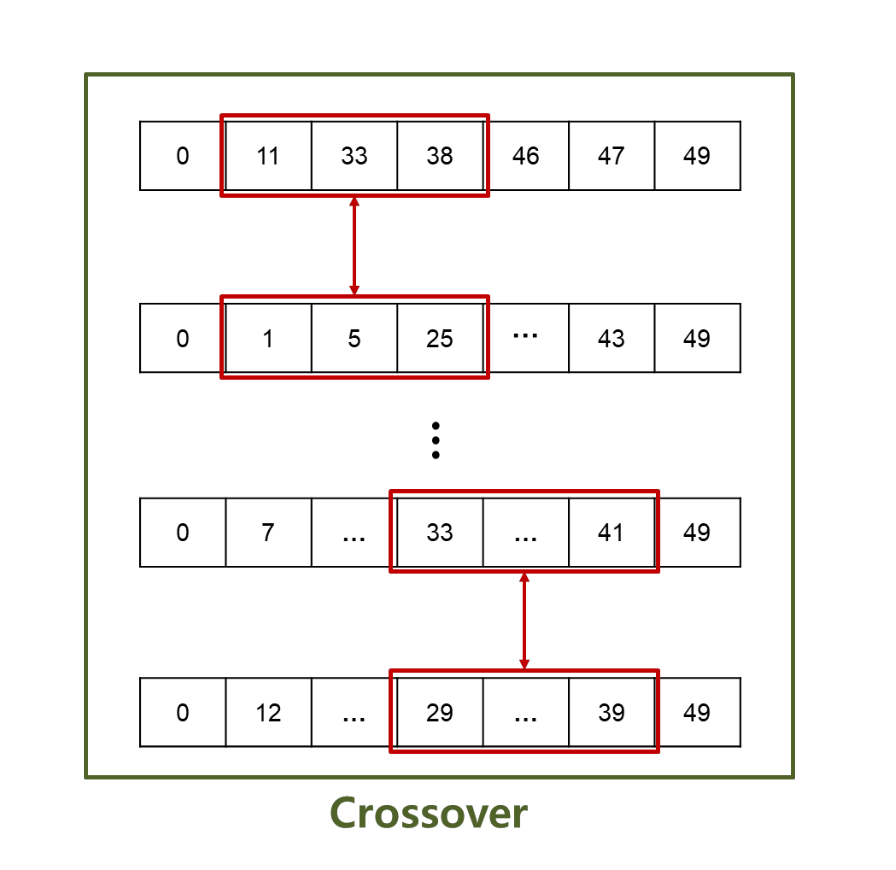
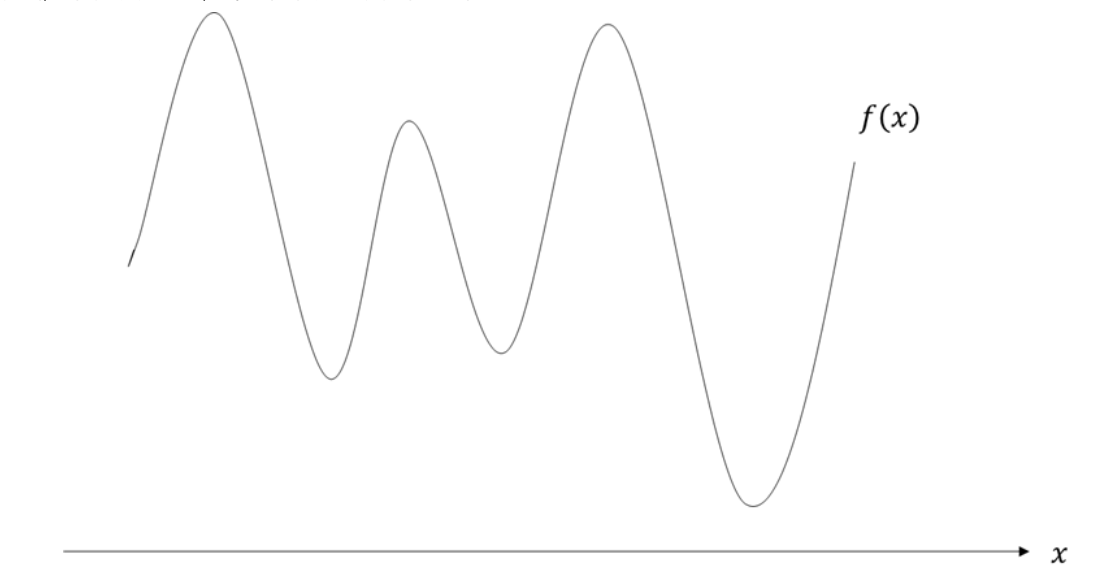
1. 유전 알고리즘 기반 경로 계획 1. 주요 요소 유전자(Gene) : 각 이동 지점 염색체(Chromosome) : 유전자의 집합 집단(Population) : 염색체의 집합(이동 경로 후보들의 집합) 2. 적합도 평가 각 염색체의 적합도를 평가 예) 장애물
14.생물학적 모방 기반 경로 계획(개미 군집 최적화)
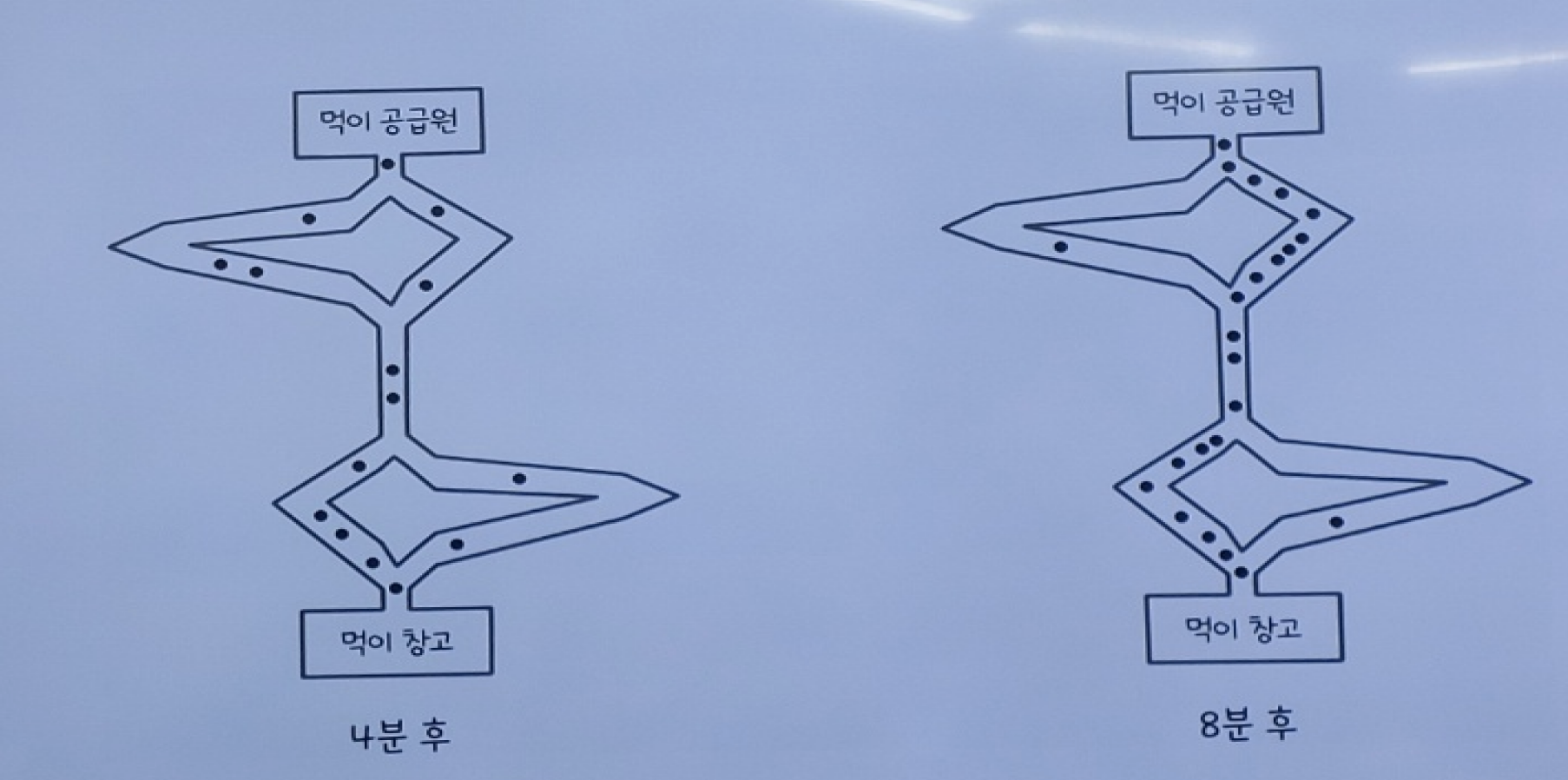
진화 알고리즘 중 하나자연에서 관찰되는 집단적 행동을 모방하여 설계된 시스템이나 알고리즘이는 주로 사회적 생물(개미, 벌, 새, 물고기 등)의 행동에서 영감을 받았으며, 각 개체가 비교적 단순한 규칙을 따르면서도 전체 집단이 복잡한 문제를 해결하거나 효율적으로 작업을
15.생물학적 모방 기반 경로계획(입자 군집 최적화)
1. 입자 군집 최적화(PSO) 입자들의 정보를 조합하여 최적해를 탐색 철새는 먼 거리를 여행할 때, 무리를 지어 이동하는 경향이 있음 지도자가 앞장서서 비행하면 나머지 새들은 적은 에너지로 비행 가능 지도자가 지치면, 새로운 지도자가 앞장서서 비행 솔
16.경로 추종
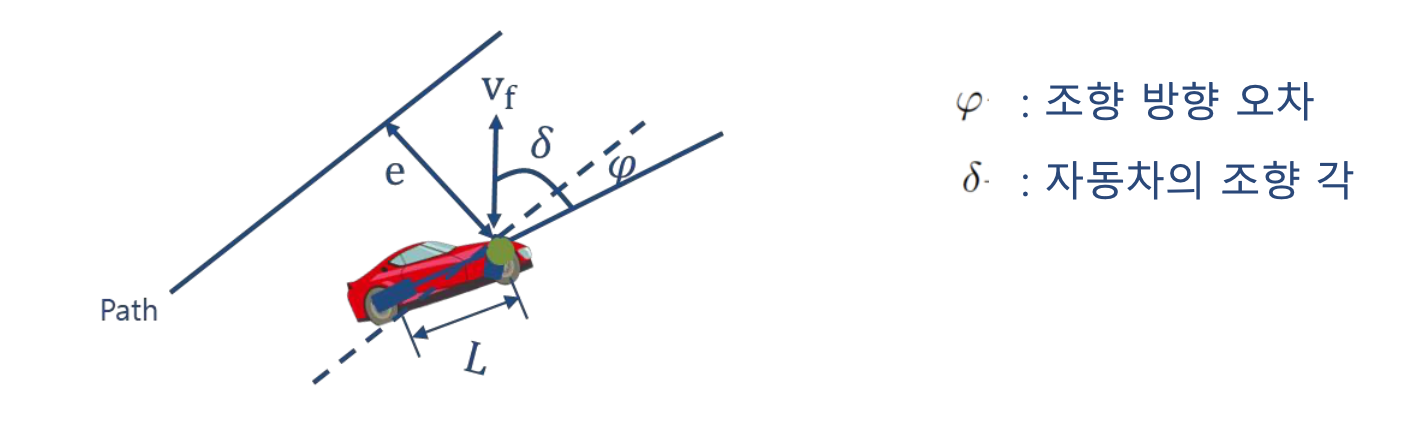
1. 경로 추종 개요 1.1 경로 추종 자동차의 역학적 특성 등을 고려하여 자동차를 제어하여 계획된 경로를 따르도록 하는 것 1.2 횡방향 제어 자동차가 계획된 경로를 추종할 수 있도록 조향 각도를 제어 활용 예 차선 유지 시스템(LKAS: Lane Keeping
17.모델 예측 제어(MPC), PID제어
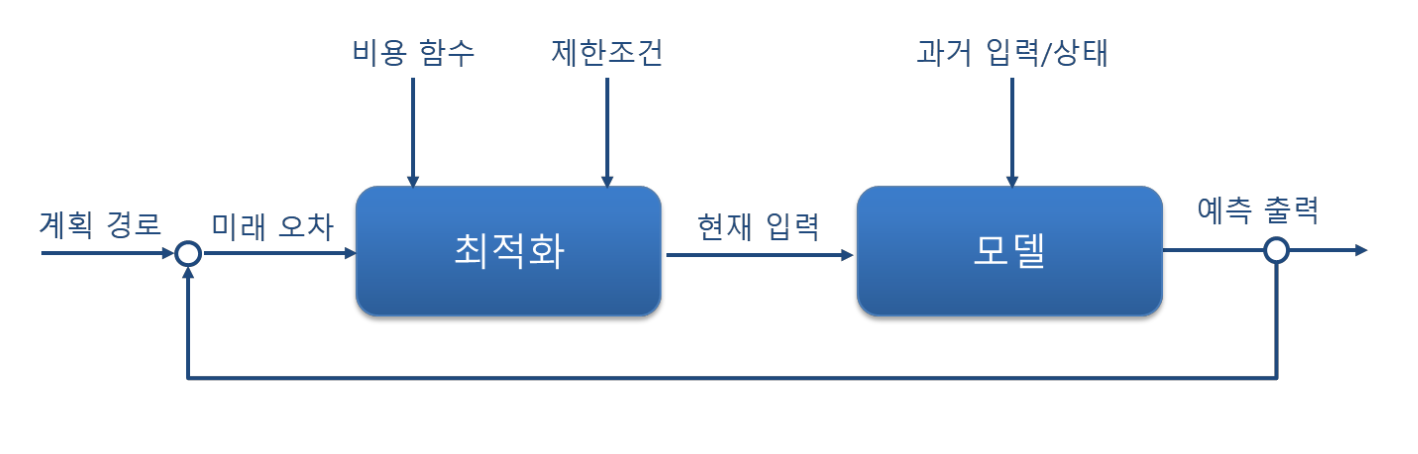
모델링 기반의 제어 방법자율주행 자동차의 경로 추종에서의 비용 함수계획된 경로와의 오차를 반영급격한 조향 명령 방지$\\upsilon$ : 조향 입력 값$\\delta x$ : 계획된 경로의 지점과 예상 지점 사이의 오차미래 결과를 예측하기 위해 모델을 사용비례(Pro