시계와 시간
다수의 센서를 사용하는 로봇은 시간에 따른 센서 값의 변화량과 그 센서들 간의 시간 동기화가 매우 중요하다. ROS2는 여러 노드들이 서로 통신하며 다양한 정보(센서 값, 알고리즘을 수행한 결과값 등)들을 주고받기 때문에 해당 정보들이 퍼블리시된 정확한 시간이 필수적이다.
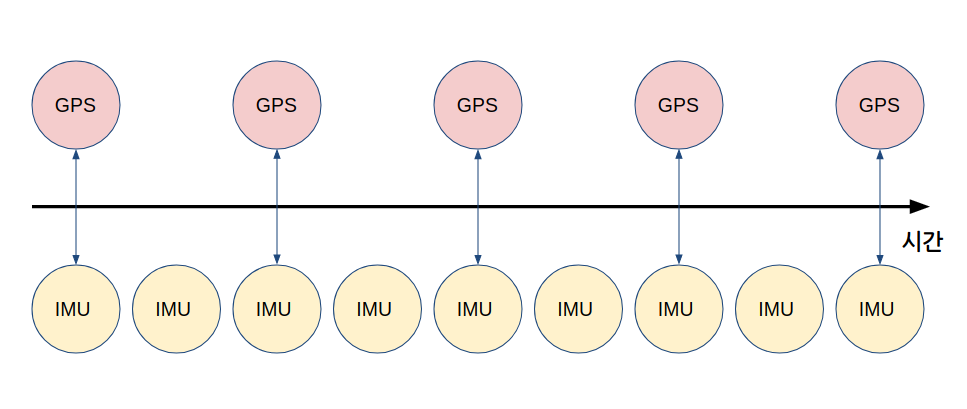
예를 들어, 로봇의 위치 추정을 위해 GPS 데이터를 발간해주는 노드와 IMU 데이터를 발간해주는 노드를 사용한다고 해보자. GPS 토픽의 경우 복수개의 인공위성으로 부터 받은 정보를 종합한 로봇의 위도, 경도, 오차 데이터를 발간하는 주기가 약 2초라고 가정하고, IMU의 로봇 자세 데이터를 발간하는 토픽의 주기가 보다 빠른 약 1초 라고 하자. 두 토픽을 구독하여 로봇의 위치를 추정하기 위해서는 보통 필터를 거치게 되는데, 이때 필터가 동작하는 주기에서 가까운 시간에 발간된 데이터를 골라 인풋으로 넣어줘야만 보다 정확한 결과를 얻을 수 있다. 만약 로봇이 동작하고 4초 후의 GPS 데이터와 3초 후의 IMU 데이터를 필터의 인풋으로 넣는다면 그 아웃풋이 4초 후의 IMU 데이터를 사용한 것보다 좋지 못할 것이다.
이 때문에 ROS2에서는 퍼블리시되는 토픽에 주요 데이터 뿐만 아니라 해당 토픽이 퍼블리시 되는 시간을 함께 포함시킬 수 있다.
stamp, frame id 를 포함하고 있는 std_msgs/msg/header 데이터 타입은 ROS 2 에서 제공하는 표준 메시지 타입 중의 하나로서 sensor_msgs, geometry_msgs, nav_msgs 등 ROS 2의 기본 메시지 타입 대부분에 포함되어 있다
# Standard metadata for higher-level stamped data types.
# This is generally used to communicate timestamped data
# in a particular coordinate frame.
# Two-integer timestamp that is expressed as seconds and nanoseconds.
builtin_interfaces/Time stamp
# Transform frame with which this data is associated.
string frame_id예를들어, 영국에 거주하는 손흥민 선수와 한국에 거주하는 박지성 前선수가 화상미팅 시간을 정하려면 어느 시계를 기준으로 잡을지 먼저 이야기해야만 할 것이다. 즉 다른 시계를 보고 시간을 이야기할 수 없기 때문에, ROS 2 에서는 그 기준이 되는 시계를 노드가 생성될 때 정해 지도록 하였다. 아래 명령어를 터미널 창에 복사하여 ROS 2의 시계와 그 시간을 확인해보자.
$ ros2 run time_rclcpp_example time_example --ros-args -p use_sim_time:=False
[INFO]: sec 1611792893.524822 nsec 1611792893524821381
[INFO]: sec 1611792894.525022 nsec 1611792894525021996
[INFO]: sec 1611792895.524994 nsec 1611792895524993945
[INFO]: sec 1611792896.524888 nsec 1611792896524888265
[INFO]: sec 1611792897.524969 nsec 1611792897524969178
[INFO]: sec 1611792898.524978 nsec 1611792898524977661
[INFO]: Over 5 seconds!
[INFO]: sec 1611792899.525013 nsec 1611792899525012802
[INFO]: sec 1611792900.525024 nsec 1611792900525024424
[INFO]: sec 1611792901.524993 nsec 1611792901524993305
[INFO]: sec 1611792902.525016 nsec 1611792902525015881
[INFO]: sec 1611792903.524888 nsec 1611792903524887863
[INFO]: sec 1611792904.524991 nsec 1611792904524990989
[INFO]: Over 5 seconds!ROS2 에서 사용하는 기본 시계는 System Clock 이며 rclcpp 에서는 std::chrono 라이브러리를 rclpy는 time 모듈을 캡슐화하여 사용하고 있다.
시간 추상화(Time Abstractions)
ROS2에서 사용하는 기본 시계와 그 시간을 확인해보았다. 이와 더불어 ROS2에서는 기본 시계외에도 타임머신처럼 동작하는 시계도 사용이 가능하다. 타임머신 처럼 동작하는 시계는 과거 어느시점으로 시간을 돌려줄 수도 있고, 시간을 좀 더 빠르게 흘러가게 할 수도 있으며 또 시간을 멈출수 있는 기능을 갖고있다.
이 시계는 과거에 기록한 데이터를 다룰때(ros2bag)나 로봇 시뮬레이션(gazebo, ignition)에서 사용할 수 있고, 이를 통해 사용자는 개발된 알고리즘을 보다 효율적으로 디버깅할 수 있다.
enum rcl_time_source_type_t
{
RCL_TIME_SOURCE_UNINITIALIZED = 0,
RCL_ROS_TIME,
RCL_SYSTEM_TIME,
RCL_STEADY_TIME
};System Time
System Clock을 사용한 시간을 말한다. 이는 단조 증가하지만 타임서버와의 동기화 를 통해 시간이 거꾸로 가는 경우도 있다. 예를 들면 server pc와 remote pc 간의 데이터 통신을 원활히 하기 위해서는 시간을 동기화 시켜야만 하는데, 아래 명령어를 각 pc에 입력하여 특정 서버의 시간으로 동기화 할 수 있다.
$ sudo ntpdate ntp.ubuntu.com
28 Jan 09:51:50 ntpdate[3424]: adjust time server 91.189.91.157 offset 0.043664 secROS Time
보통 시뮬레이션 환경에서 시간을 조절하기 위해 많이 사용한다. 노드가 생성되기 전에 노드가 기본으로 가지고 있는 파라미터 중의 하나인 use_sim_time을 통해 사용할 수 있으며, use_sim_time := True 이면 설정된 노드는 /clock 토픽을 서브스크라이브 할때까지 시간을 0으로 초기화한다.
$ ros2 run time_rclcpp_example time_example --ros-args -p use_sim_time:=True
[INFO]: sec 0.000000 nsec 0
[INFO]: sec 0.000000 nsec 0
[INFO]: sec 0.000000 nsec 0
[INFO]: sec 0.000000 nsec 0
[INFO]: sec 0.000000 nsec 0
[INFO]: sec 0.000000 nsec 0
[INFO]: sec 0.000000 nsec 0Time API
ROS2 에서 제공하는 시간과 관련된 API는 크게 time, duration, rate가 있다. 다음 코드(rclcpp, rclpy)를 보면서 사용법을 알아보자.
time_rclcpp_example/src/main.cpp
#include <memory>
#include <utility>
#include "rclcpp/rclcpp.hpp"
#include "rclcpp/time_source.hpp"
#include "std_msgs/msg/header.hpp"
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("time_example_node");
auto time_publisher = node->create_publisher<std_msgs::msg::Header>("time", 10);
std_msgs::msg::Header msg;
rclcpp::WallRate loop_rate(1.0);
rclcpp::Duration duration(1, 0);
while (rclcpp::ok()) {
static rclcpp::Time past = node->now();
rclcpp::Time now = node->now();
RCLCPP_INFO(node->get_logger(), "sec %lf nsec %ld", now.seconds(), now.nanoseconds());
if ((now - past).nanoseconds() * 1e-9 > 5) {
RCLCPP_INFO(node->get_logger(), "Over 5 seconds!");
past = node->now();
}
msg.stamp = now + duration;
time_publisher->publish(msg);
rclcpp::spin_some(node);
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}time_rclpy_example/time_example/main.py
import rclpy
from rclpy.duration import Duration
from std_msgs.msg import Header
def main(args=None):
rclpy.init(args=args)
node = rclpy.create_node('time_example_node')
time_publisher = node.create_publisher(Header, 'time', 10)
msg = Header()
rate = node.create_rate(1.0)
duration = Duration(seconds=1, nanoseconds=0)
past = node.get_clock().now()
try:
while rclpy.ok():
now = node.get_clock().now()
seconds, nanoseconds = now.seconds_nanoseconds()
node.get_logger().info('sec {0} nsec {1}'.format(seconds, nanoseconds))
if ((now - past).nanoseconds * 1e-9) > 5:
node.get_logger().info('Over 5 seconds!')
past = node.get_clock().now()
msg.stamp = (now + duration).to_msg()
time_publisher.publish(msg)
rclpy.spin_once(node)
rate.sleep()
except KeyboardInterrupt:
node.get_logger().info('Keyboard Interrupt (SIGINT)')
finally:
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()Time
Time 클래스는 시간을 다룰 수 있는 오퍼레이터를 제공하며 그 결과를 seconds 혹은 nanoseconds 단위로 반환해준다. seconds는 double형이고, nanoseconds는 unsigned int의 64비트형을 가지며 nanoseconds가 seconds보다 더 정확한 시간을 반환한다.
if ((now - past).nanoseconds() * 1e-9 > 5) {
RCLCPP_INFO(node->get_logger(), "Over 5 seconds!");
past = node->now();
}ROS2 노드에서는 now 멤버 함수를 통해 노드시간을 확인할 수 있다.
rclcpp::Time now = node->now();Duration
Duration 클래스는 순간의 시간(timestamp, 5시 30분 29초)이 아닌 기간(3시간 후, 1시간 전)을 다룰수 있는 오퍼레이터를 제공하며 그 결과를 seconds 혹은 nanoseconds 단위로 반환해준다. Duration은 이전 시간을 이야기할 수 있고, 음수로 표기된다.
Duration은 Time과의 연산이 가능하여 보다 직관적으로 시간을 다룰 수 있도록 한다. 예를 들면 다음 예제 코드와 같이 실제 시간보다 1초 느린 값을 간단히 계산할 수 있다.
rclcpp::Duration duration(1, 0);
msg.stamp = now + duration;
time_publisher->publish(msg);Rate
Rate 클래스는 반복문에서 특정 주기를 유지시켜주는 API를 제공한다. 다음 예시를 보면 WallRate 클래스의 생성자에 헤르츠 단위로 주기를 설정한 후 반복문 가장 아래 줄에 sleep 함수로 주기를 맞춰 주는 것을 확인 할 수 있다. 하지만 ROS2에서는 콜백 함수를 사용하는 Timer API를 제공하고 있기에 이를 사용하는것을 추천한다.
rclcpp::WallRate loop_rate(1);
while (rclcpp::ok()) {
// 코드 중략
loop_rate.sleep();
}실행 결과
rclcpp로 개발된 노드를 실행시켜보자. 먼저 use_sim_time 파라미터를 False 로 세팅하여 System Time을 사용한 로그를 확인해보면, UTC 형식으로 1초마다 로그가 나오는 것을 확인할 수 있고, 5초가 지날 때마다 로그가 나오는것을 확인할 수 있다.
$ ros2 run time_rclcpp_example time_example --ros-args -p use_sim_time:=False
[INFO]: sec 1611808317.044796 nsec 1611808317044796531
[INFO]: sec 1611808318.044951 nsec 1611808318044951274
[INFO]: sec 1611808319.044939 nsec 1611808319044938670
[INFO]: sec 1611808320.044937 nsec 1611808320044936942
[INFO]: sec 1611808321.044966 nsec 1611808321044965935
[INFO]: sec 1611808322.044962 nsec 1611808322044962073
[INFO]: Over 5 seconds!
[INFO]: sec 1611808323.044957 nsec 1611808323044957461
[INFO]: sec 1611808324.044966 nsec 1611808324044966062
[INFO]: sec 1611808325.044970 nsec 1611808325044969462
[INFO]: sec 1611808326.044998 nsec 1611808326044997735
[INFO]: sec 1611808327.045034 nsec 1611808327045034118
[INFO]: sec 1611808328.044970 nsec 1611808328044969859
[INFO]: Over 5 seconds!
[INFO]: sec 1611808330.585464 nsec 1611808330585463561
[INFO]: sec 1611808331.585448 nsec 1611808331585448206
[INFO]: sec 1611808332.585462 nsec 1611808332585461648
[INFO]: sec 1611808333.585369 nsec 1611808333585369322
[INFO]: Over 5 seconds!
[INFO]: sec 1611808334.585364 nsec 1611808334585364035
[INFO]: sec 1611808335.585377 nsec 1611808335585377352
[INFO]: sec 1611808336.585368 nsec 1611808336585367969
[INFO]: sec 1611808337.585372 nsec 1611808337585372004
[INFO]: sec 1611808338.585397 nsec 1611808338585397207
[INFO]: sec 1611808339.585366 nsec 1611808339585365766
[INFO]: Over 5 seconds!use_sim_time 파라미터를 True로 세팅하여 ROS Time을 사용한 노드의 로그를 확인해 보자. /clock 토픽이 없기 때문에 시간은 항상 0으로 초기화된다. /time 토픽을 확인해보면 Duration을 이용한 시간 수정으로 인해 stamp가 1초 느리게 나오는 것을 확인할 수 있다.
$ ros2 run time_rclcpp_example time_example --ros-args -p use_sim_time:=True
[INFO]: sec 0.000000 nsec 0
[INFO]: sec 0.000000 nsec 0
[INFO]: sec 0.000000 nsec 0
$ ros2 topic echo /time
stamp:
sec: 1
nanosec: 0
frame_id: ''
---
stamp:
sec: 1
nanosec: 0
frame_id: ''
---
stamp:
sec: 1
nanosec: 0
frame_id: ''
---rclpy로 개발된 노드를 실행시켰을때 결과도 동일하다.
$ ros2 run time_rclpy_example time_example --ros-args -p use_sim_time:=False
[INFO]: sec 1611845885 nsec 1185392
[INFO]: sec 1611845886 nsec 1596232
[INFO]: sec 1611845887 nsec 1656253
[INFO]: sec 1611845888 nsec 1605086
[INFO]: sec 1611845889 nsec 1518249
[INFO]: sec 1611845890 nsec 1772286
[INFO]: Over 5 seconds!
[INFO]: sec 1611845891 nsec 1571463
[INFO]: sec 1611845892 nsec 1440453
[INFO]: sec 1611845893 nsec 1595560
[INFO]: sec 1611845894 nsec 1582543
[INFO]: sec 1611845895 nsec 1552400
[INFO]: sec 1611845896 nsec 1604775
[INFO]: Over 5 seconds!
[INFO]: sec 1611845897 nsec 1605453이번시간에는 ROS에서의 시계와 시간에 대해 알아보았다. ROS 2 에서는 여러 노드가 결합하여 동작하기 때문에 각 노드에서 사용하는 시계와 그 시간을 동기화 시키는 것이 매우 중요하다는 것을 다시한번 강조하고 싶다.
