linux dev
1.linux 개발 라이브러리 정리

이미지 로딩 라이브러리https://github.com/GNOME/gdk-pixbuf콜백빼는 예시 https://docs.gtk.org/gdk-pixbuf/텍스트 rendering 라이브러리https://github.com/GNOME/pang
2.linux 오프라인 패키지 설치
상황특정 패키지(mysql-server) 를 rocky8 머신에 설치해야 하는데, 사내 인트라넷에 있는 머신이라필요한 repository 에 접근이 불가하다인터넷 접근되는 머신에서 관련 rpm 패키지들을 받아서, 파일전송 후 설치하는 방식을 사용아래 명령은 rpm 패키
3.dev 헤더 확인
개발중 dev 헤더가 없어서 빌드가 안되는 경우가 있다.이 경우 필요한 dev 헤더를 구글링하는 방법도 있으나,apt 명령을 사용해서, 어떤 패키지가 제공해주는지 확인할수도 있다.https://askubuntu.com/a/1443970/1694351
4.소스코드에 debian patch 적용
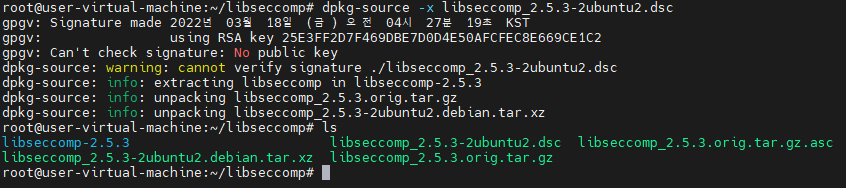
libseccomp 소스코드가 필요한 상황인데, launchpad 사이트에 접속해보면여러파일들이 존재한다.debian 계열의 경우, upstream (mainline) 소스코드와 patch 가 함께 제공된다.구조는 다음과 같다.https://wiki.debia
5.systemd gdb 세션 종료
systemd 서비스를 디버깅을 위해 gdb 를 붙인후 세션을 종료 (CTRL+C) 하려고 하면,모든 ssh 세션이 종료되는 문제가 있다다음 스탭을 진행한다. (from chatgpt)
6.소스코드에 rocky patch 적용
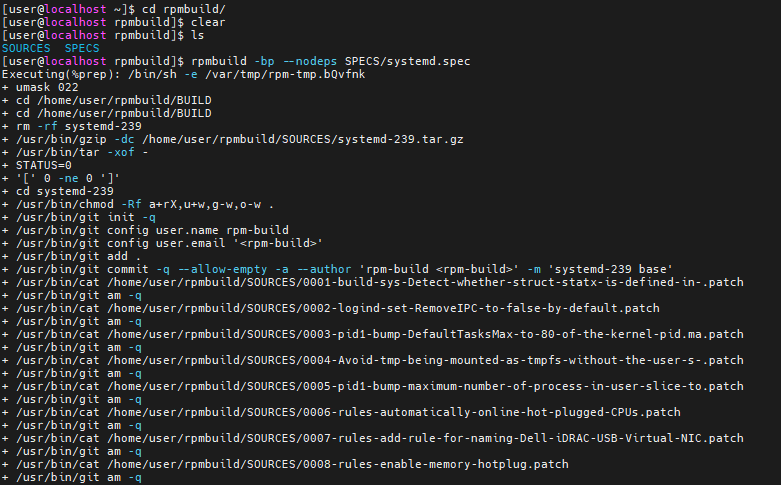
systemd 서비스 분석을 위해 소스코드 획득이 필요하다기본적으로 redhat 계열 코드들은 source rpm 이라는 특수한 rpm 을 획득한 후,rpmbuild 라는 명령을 통해 생성가능하다1) source rpm 다운로드 후 설치, 현재 유저 디렉토리에 rpmb
7.pkg-config pc 파일을 찾으며 정리한 생각
opencv 어플리케이션을 빌드가 필요한 상황이고,빌드 스크립트 내에선 pkg-config 를 사용하고 있다.opencv 라이브러리가 설치되어 있지 않으므로 빌드가 실패한다.ENVIRONMENT VARIABLES PKG_CONFIG_PATH
8.rpi 5 gstreamer tcp 스트리밍
imx219@10 에서 지원하는 caps 확인 libcamera-hello 를 사용, 카메라모듈 양품임을 확인 gst-launch-1.0 libcamerasrc camera-name="/base/axi/pcie\@120000/rp1/i2c\@80000/imx219\
9.vscode 환경구성
vim 이외의 개발환경을 제공해야 하는 상황이다.vscode 를 설치하고 빌드/실행하는 방법을 확인한다.아래 링크에서 apt 방식으로 설치https://code.visualstudio.com/docs/setup/linuxvscode 에서 File -- Open
10.pcl armv8 porting
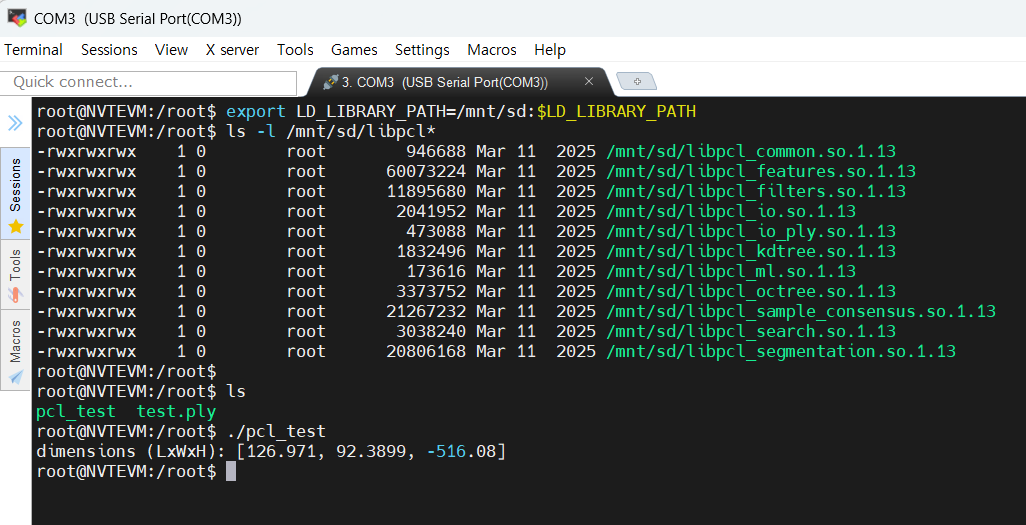
ubuntu24 qt 에서 돌리던 체적 알고리즘을 NT98692 (armv8) 보드에서 돌릴수 있는지 확인이 필요하다.체적 알고리즘은 pcl 라이브러리가 필요하므로, armv8 보드에서 사용할수 있는 방법이 필요하다.armv8 보드용으로 pcl 라이브러리를 크로스 컴파
11.python 에서 sdk 를 배포할때
arducam 에서는 Arducam_tof_camera 에서 ToF 카메라 제어를 위한 python 예제코드를 제공하고 있다. https://www.amazon.com/Arducam-Rolling-Shutter-Raspberry-Solution/dp/B0BRB
12.opencv armv8 porting
체적 알고리즘 동작이 잘 되는지 궁금할 때가 있다.보통 imshow() 로 동작을 확인하는데, NT98692(armv8) 보드 sdk 에서 제공하는 opencv 는 gtk support 가 disable 되어 있다.체적 알고리즘이 사용하고 있는 opencv 를, gtk
13.C++ 라이브러리 호환성 지원
상황 정형체적 알고리즘에선 opencv 라이브러리를 사용하고 있다. opencv 라이브러리는 ubuntu22 에서, aarch64-linux-gnu-g++ 로 빌드하였는데 라이브러리에는 GLIBCXX_3.4.30 심볼이 들어가 있다 ZNSt18conditionvari
14.C++ 라이브러리 호환성 지원 2
비정형 체적 알고리즘에서는 pcl 라이브러리를 사용하고 있다.C++ 라이브러리 호환성 문제는 pcl 라이브러리에도 있을것으로 예상되므로, 크로스 컴파일러를 사용해서 재 빌드해야 하는 상황이다.pcl 라이브러리 빌드를 위한 환경을 구성한다ubuntu18노바텍 크로스 컴파
15.이더넷 송수신 프로그램 작성
상황 리눅스 보드에서 계산된 체적값을 윈도우 PC 로 전송하는 프로그램이 필요하다 체적값은 이더넷 케이블을 통해 전달되고, PC 에서는 이 데이터가 넘어오는것을 START/STOP 할수 있는 버튼이 필요하다. 확인한 내용 전략 linux 의 경우 BSD socke
16.VideoCapture UART 서버 작성
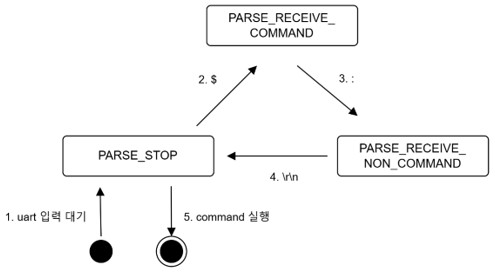
3D reconstruction 을 위해, 드론에서 4K 이미지 촬영이 필요하다.4K 이미지 촬영을 위해 RGB 카메라와 carrier 보드를 드론에 부착하고, 드론에서는 UART 로 carrier 보드를 제어하는 구조가 필요하다.RGB 카메라 : e-CAM121_CU