01. 분류의 개요
-
지도학습: 레이블(Label), 즉 명시적인 정답이 있는 데이터가 주어진 상태에서 학습하는 머신러닝 방식
-
지도학습의 대표 유형인 '분류(Classification)'
- 학습 데이터로 주어진 데이터의 피처와 레이블값(결정 값, 클래스 값)을 머신러닝 알고리즘으로 학습해 모델 생성
→ 이렇게 생성된 모델에 새로운 데이터 값이 주어졌을 때 미지의 레이블 값을 예측
→ 기존 데이터가 어떤 레이블에 속하는지 패턴을 알고리즘으로 인지한 뒤 새로운 데이터가 어떤 레이블에 속하는지 판별하는 것
- 학습 데이터로 주어진 데이터의 피처와 레이블값(결정 값, 클래스 값)을 머신러닝 알고리즘으로 학습해 모델 생성
-
분류는 다양한 머신러닝 알고리즘으로 구현 가능하다.
e.g. 나이브 베이즈, 로지스틱 회귀, 결정 트리, 서포트 벡터 머신, 신경망, 앙상블 등 -
앙상블 (Ensemble): 서로 다른/같은 알고리즘을 단순히 결합한 형태도 존재, 일반적으로는 배깅(Bagging)과 부스팅(Boosting) 방식으로 나뉜다.
- 배깅: 랜덤 포레스트(Random Forest)가 대표적
- 부스팅: 그래디언트 부스팅(Gradient Boosting), XgBoost, LightGBM
- 앙상블의 기본 알고리즘으로는 일반적으로 '결정 트리'가 사용된다.
02. 결정 트리 (Decision Tree)
: 데이터에 있는 규칙을 학습을 통해 자동으로 찾아내 트리 기반의 분류 규칙을 만드는 것
-
데이터의 어떤 기준을 바탕으로 규칙을 만들어야 가장 효율적인 분류가 될 것인가가 알고리즘의 성능을 크게 좌우한다.
-
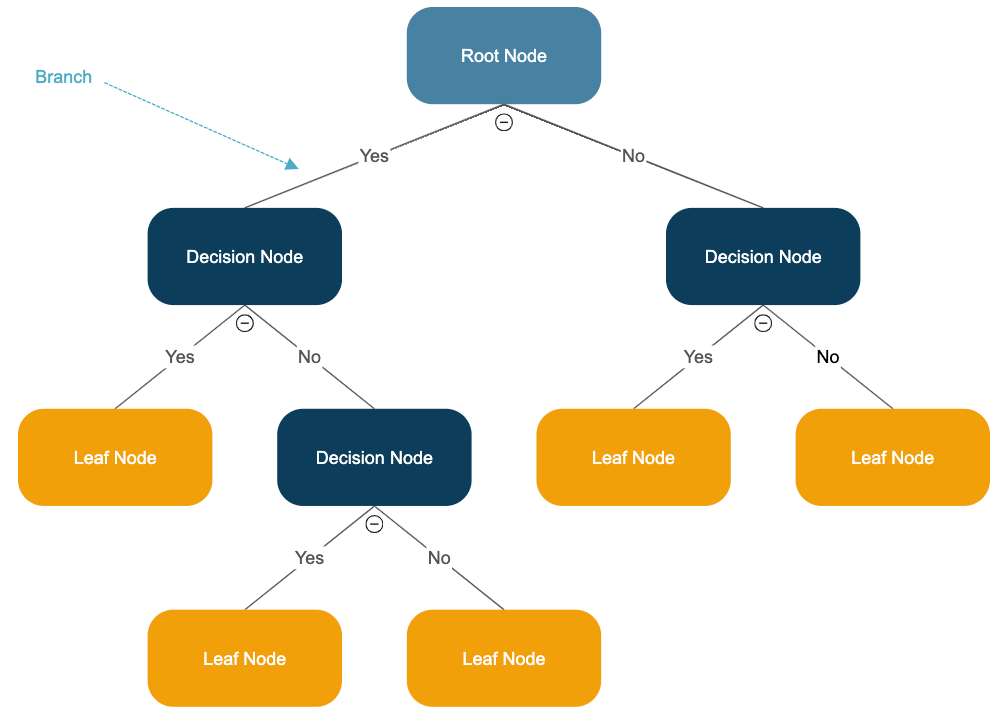
Decision node = 규칙 조건, Leaf node = 결정된 클래스 값
❗많은 규칙이 있다 → 분류를 결정하는 방식이 복잡해진다 → 과적합으로 이어지기 쉽다
❗트리의 깊이가 깊어질수록 결정 트리의 예측 성능이 저하될 가능성 ↑
→ 데이터를 분류할 때 최대한 많은 데이터 세트가 해당 분류에 속할 수 있도록 Decision node의 규칙이 정해져야 한다
→ 균일한 데이터 세트를 구성할 수 있도록 분할하는 것이 필요
❓균일한 데이터 세트란?
- 데이터를 판단하는 데 있어 상대적으로 더 적은 정보가 필요한, 쉽게 예측할 수 있도록 된 데이터 세트 (e.g. 모두 검은 공)
- 정보 이득(Information Gain) 지수, 지니 계수로 균일도 측정
- 정보 이득 지수가 높거나, 지니 계수가 낮은 조건을 찾아 데이터 세트 분할
1) 결정 트리 모델의 특징
- 장점
1. 균일도를 기반으로 하고 있어 알고리즘이 쉽고 직관적이다.
2. 피처의 스케일링과 정규화 같은 전처리 작업이 필요 없다.
- 단점
1. 과적합으로 정확도가 떨어진다.
(트리 깊이가 계속 커지고 결과적으로 복잡한 학습 모델이 됨 → 트리 크기를 사전에 제한하는 것이 도움이 됨)
2) 결정 트리 파라미터
-
DecisionTreeClassifier: 결정 트리 알고리즘을 구현한, 분류(Classification)를 위한 클래스-
min_samples_split: 노드를 분할하기 위한 최소한의 샘플 데이터 수, 과적합 제어 시 사용됨 (작게 설정 → 분할되는 노드 ↑ → 과적합 가능성 ↑) -
min_samples_leaf: 분할될 경우 왼쪽과 오른쪽 브랜치 노드에서 가져야 할 최소한의 샘플 데이터 수 -
max_features: 최적의 분할을 위해 고려할 최대 피처 개수 -
max_depth: 트리의 최대 깊이 -
max_leaf_nodes: 말단 노드의 최대 개수
-
3) 결정 트리 모델의 시각화
- Graphviz 설치 후 이용
- 브랜치(Branch) 노드: 자식 노드가 있는 노드, 자식 노드를 만들기 위한 분할 규칙 조건을 가지고 있다
- 리프(Leaf) 노드: 자식 노드가 없는 노드, 최종 클래스(레이블)값이 결정된 노드
from sklearn.tree import export_graphviz
export_graphviz(dt_clf, out_file="tree.dot", class_names=iris_data.target_names,
feature_names=iris_data.feature_names, impurity=True, filled=True)
import graphviz
with open("tree.dot") as f:
dot_graph = f.read()
graph = graphviz.Source(dot_graph)
graph
# 이미지로 저장
# graph.render(filename='test_img', directory='C:/Users/splen/Desktop', format='png')
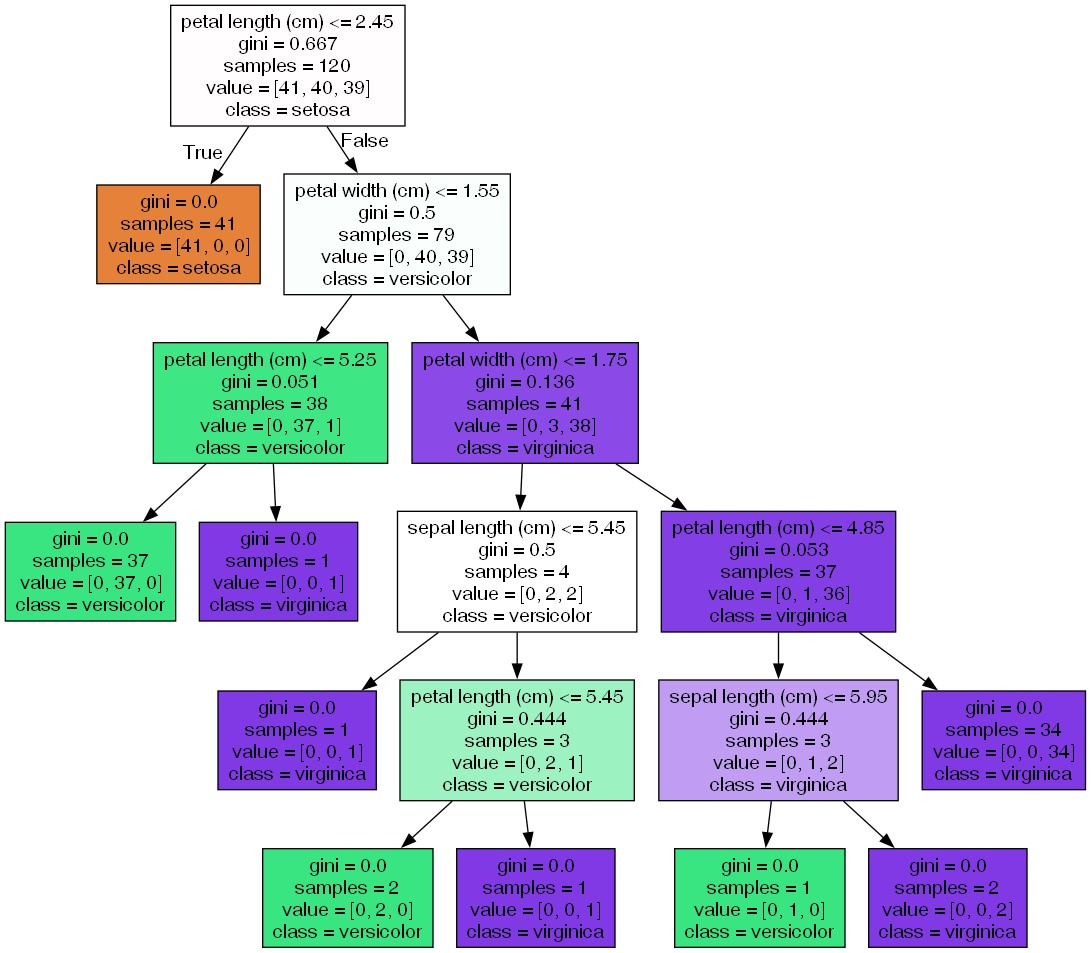
[결과 및 설명]
-
petal length(cm) <= 2.45와 같은 피처의 조건: 자식 노드를 만들기 위한 규칙 조건, 이런 조건이 없으면 리프 노드 -
value = [ ]는 클래스 값 기반의 데이터 건수, 위의 경우에 label 0/1/2 클래스에 대한 각각의 데이터 개수를 의미 -
gini:value = [ ]에서 주어진 데이터 분포에서의 지니 계수 (낮으면 좋음) -
samples: 현 규칙에 해당하는 데이터 건수 -
class: 현 데이터에서 가장 많은 건수의 데이터가 속한 클래스, 예측 클래스
-
각 노드의 색깔은 데이터의 레이블 값 의미
-
색깔이 짙을수록 지니 계수 ↓, 해당 레이블에 속하는 샘플 데이터 ↑
-
완벽하게 클래스 값을 구별하기 위해 트리 노드를 계속해서 만들어 나감 → 모델이 쉽게 과적합되는 문제
-
따라서 결정 트리 알고리즘을 제어하는 대부분의 하이퍼 파라미터는 복잡한 트리가 생성되는 것을 막기 위한 용도이다.
결정트리는 어떠한 속성을 규칙 조건으로 선택하느냐가 중요한 요건이다.
-
feature_importances_로 ndarray 형태로 피처 순서대로 중요도 값을 리턴
4) 결정 트리 과적합 (Overfitting)
- Sklearn에서 제공하는
make_classification()함수: 분류를 위한 테스트용 데이터 쉽게 생성 가능, 호출 시 반환되는 객체는 피처 데이터 세트 & 클래스 레이블 데이터 세트
from sklearn.datasets import make_classification
import matplotlib.pyplot as plt
%matplotlib inline
plt.title("3 Class values with 2 features sample data creation")
# 피처 2개, 클래스 3가지 유형의 분류 샘플 데이터 생성
X_features, y_labels = make_classification(n_features=2, n_redundant=0, n_informative=2, n_classes=3,
n_clusters_per_class=1, random_state=0)
# 2개의 피처로 2차원 좌표 시각화, 각 클래스 값은 다른 색깔로 표시
plt.scatter(X_features[:, 0], X_features[:, 1], marker='o', c=y_labels, s=25, edgecolor='k')[output]
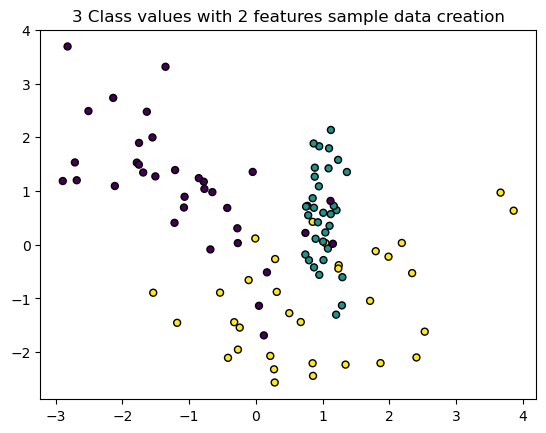
- 각 피처가 X, Y축으로 나열된 2차원 그래프
- 3개의 클래스 값 구분은 색깔로 한다.
- X_features와 y_labels 데이터 세트를 기반으로 결정트리를 학습시킨다.
[트리 생성 제약 없는 경우]
from sklearn.tree import DecisionTreeClassifier
dt_clf = DecisionTreeClassifier(random_state=156).fit(X_features, y_labels)
visualize_boundary(dt_clf, X_features, y_labels)[트리 생성 조건 제약한 경우]
# min_samples_leaf=6 으로 트리 생성 조건을 제약한 결정 경계 시각화
dt_clf = DecisionTreeClassifier(min_samples_leaf=6, random_state=156).fit(X_features, y_labels)
visualize_boundary(dt_clf, X_features, y_labels)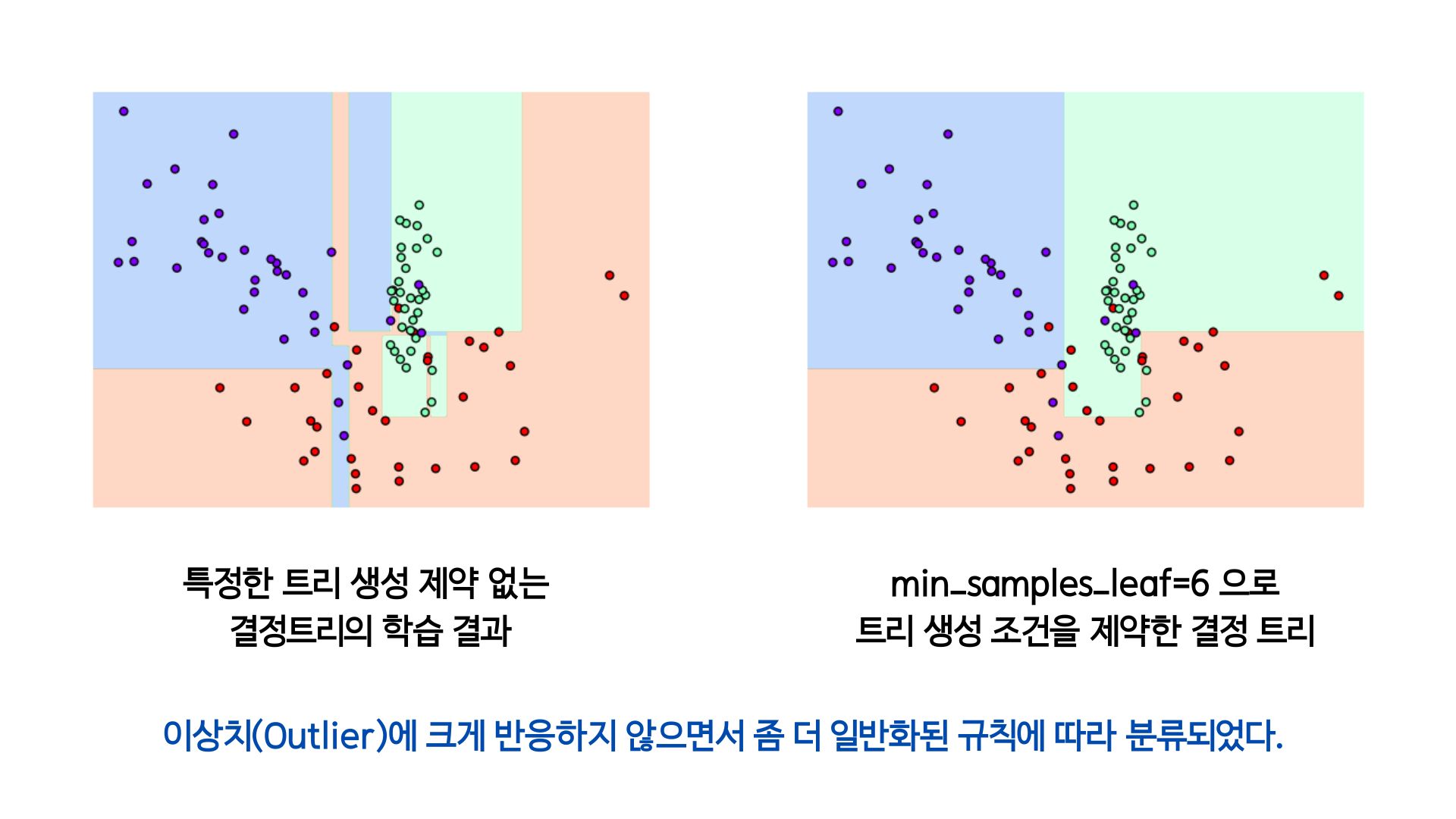
❗이상치(Outlier)란, 보통 관측된 데이터의 범위에서 많이 벗어난 아주 작은 값이나 큰 값을 말한다.
[실습] 사용자 행동 인식 데이터 세트
- 사용자 행동 인식 데이터 세트
- UCI 머신러닝 리포지토리(Machine Learning Repository) 제공
- 30명에게 스마트폰 센서를 장착시킨 뒤 사람의 동작과 관련된 여러 가지 피처를 수집한 데이터❗파라미터 vs. 하이퍼파라미터
➡️ 파라미터는 학습의 대상으로, 학습 알고리즘을 통해 자동적으로 학습하게 된다. 하이퍼파라미터는 경험, 데이터의 특성 등에 근거해 사용자가 설정하는 값이다. - Sklearn의
GridSearchCV- 하이퍼 파라미터 튜닝에 사용
- 하이퍼 파라미터 튜닝: 여러 실험을 통해 하이퍼파라미터 세트를 선택하고 모델을 통해 실행하는 것
- 머신러닝 알고리즘에 사용되는 하이퍼 파라미터를 입력해 학습을 하고 측정을 하면서 가장 좋은 하이퍼 파라미터를 알려주는 역할
from sklearn.model_selection import GridSearchCV
# 최대 깊이 6, 8, ... 로 변화시키면서 예측 성능 확인
params = {
'max_depth' : [6, 8, 10, 12, 16, 20, 24],
'min_samples_split' : [16] # 고정값
}
grid_cv = GridSearchCV(dt_clf, param_grid=params, scoring='accuracy', cv=5, verbose=1)
grid_cv.fit(X_train, y_train)
print('GridSearchCV 최고 평균 정확도 수치: {0:.4f}'.format(grid_cv.best_score_))
print('GridSearchCV 최적 하이퍼 파라미터:', grid_cv.best_params_)max_depth가 8일 때 5개 폴드 세트의 최고 평균 정확도 결과가 약 85.49%인 것으로 나타난다.
Fitting 5 folds for each of 7 candidates, totalling 35 fits
GridSearchCV 최고 평균 정확도 수치: 0.8549
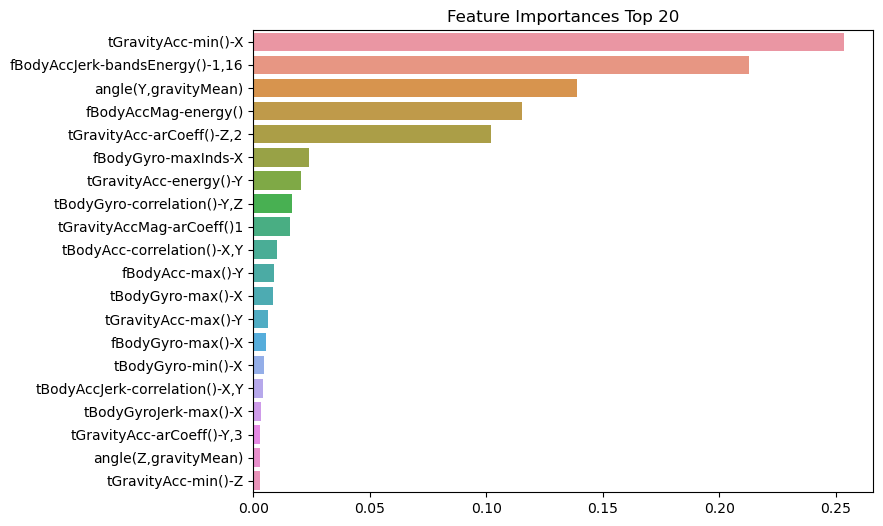
GridSearchCV 최적 하이퍼 파라미터: {'max_depth': 8, 'min_samples_split': 16}feature_importances_이용하여 피처 중요도 확인 & 그래프로 나타내기
→ 중요도가 높은 피처들이 결정 트리의 규칙 생성에 중요한 영향을 미친다.
03. 앙상블 학습 (Ensemble Learning)
: 여러 개의 분류기(Classifier)르 생성하고 그 예측을 결합함으로써 보다 정확한 최종 예측을 도출하는 기법
- 이미지, 영상, 음성 등의 비정형 데이터의 분류는 딥러닝이 뛰어난 성능을 보이지만, 대부분의 정형 데이터 분류에서 뛰어난 성능을 보인다.
- 앙상블 학습의 유형
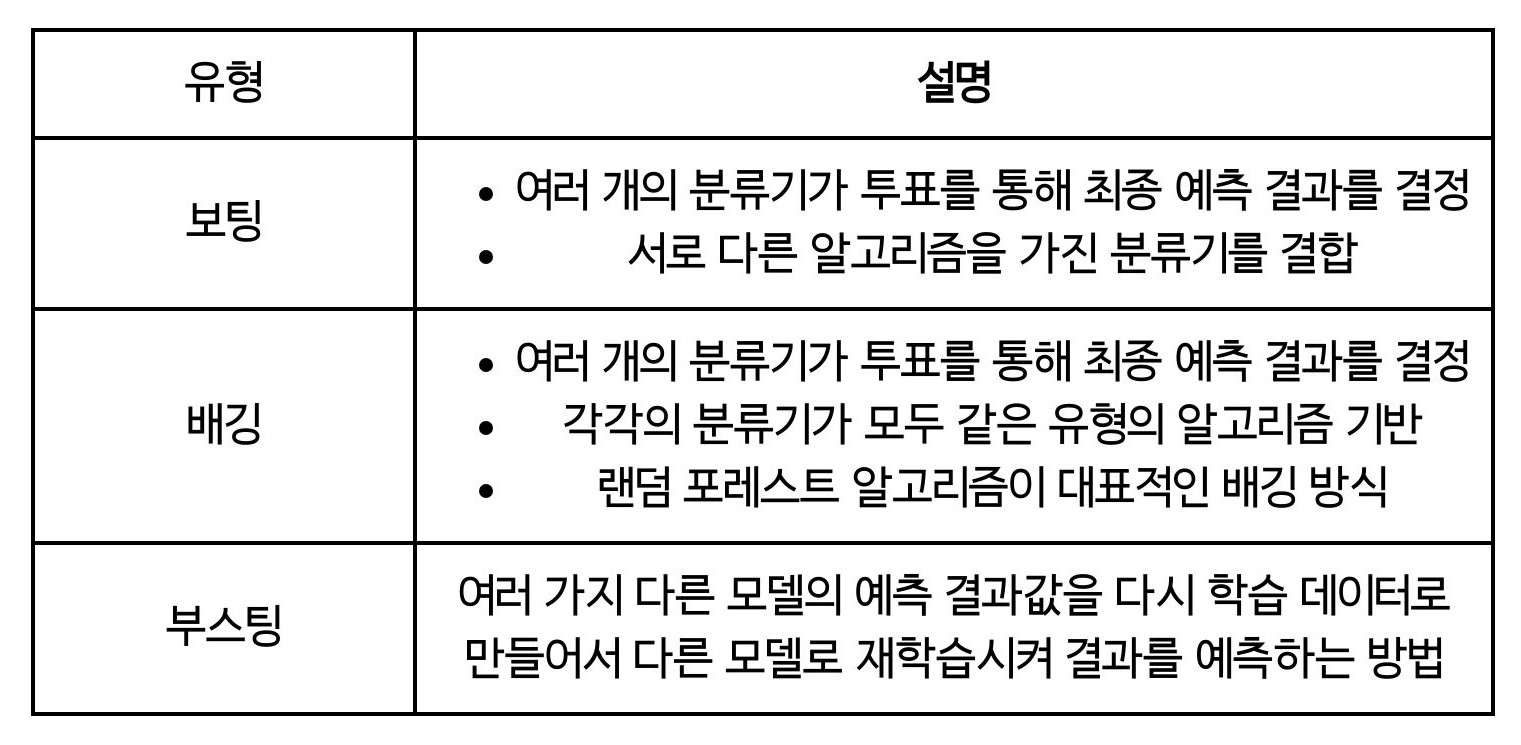
- 하드 보팅: 다수의 분류기 간 다수결로 최종 클래스 결정
- 소프트 보팅: 분류기들의 레이블 값 결정 확률을 모두 더하고 이를 평균해서 이들 중 확률이 가장 높은 레이블 값을 최종 보팅 결과값으로 선정
(일반적인 보팅 방법)
- 보팅 분류기 (Voting Classifier)
- Sklearn에서 보팅 방식의 앙상블을 구현한
VotingClassifier클래스 제공
- Sklearn에서 보팅 방식의 앙상블을 구현한
lr_clf = LogisticRegression(solver='liblinear')
knn_clf = KNeighborsClassifier(n_neighbors=8)
vo_clf = VotingClassifier(estimators=[('LR', lr_clf), ('KNN', knn_clf)], voting='soft')
X_train, X_test, y_train, y_test = train_test_split(cancer.data, cancer.target, test_size=0.2, random_state=156)
# VotingClassifier 학습, 예측, 평가
vo_clf.fit(X_train, y_train)
pred = vo_clf.predict(X_test)
print('Voting 분류기 정확도: {0:.4f}'.format(accuracy_score(y_test, pred)))
# 개별 모델 학습, 예측, 평가
classifiers = [lr_clf, knn_clf]
for classifier in classifiers:
classifier.fit(X_train, y_train)
pred = classifier.predict(X_test)
class_name = classifier.__class__.__name__
print('{0} 정확도: {1:.4f}'.format(class_name, accuracy_score(y_test, pred)))04. 랜덤 포레스트
-
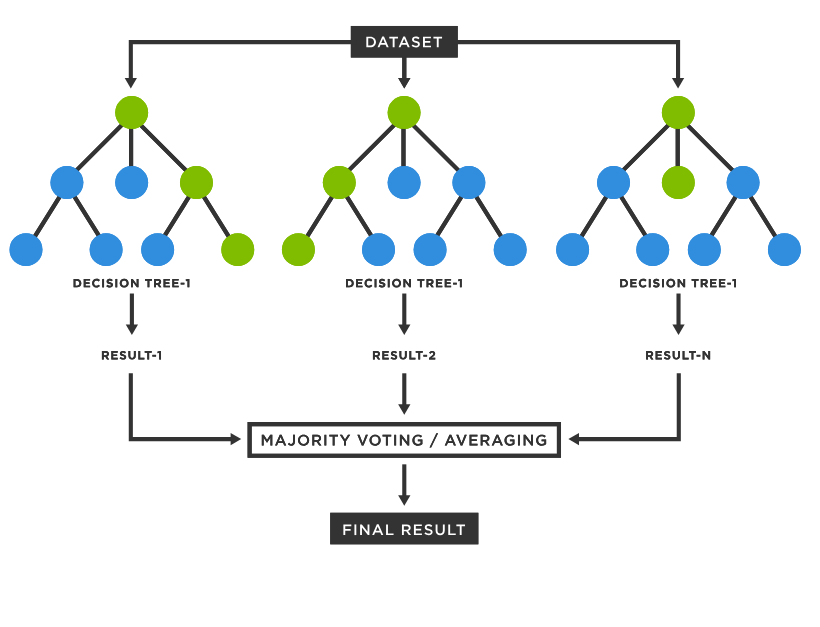
배깅의 대표적인 알고리즘
-
여러 개의 결정 트리 분류기가 전체 데이터에서 배깅 방식으로 각자의 데이터를 샘플링해 개별적으로 학습을 수행한 뒤, 최종적으로 모든 분류기가 보팅을 통해 예측 결정을 하게 된다.
-
부트스트래핑(Bootstraping) 분할 방식: 개별 트리가 학습하는 데이터 세트는 전체 데이터에서 일부가 중첩되게 샘플링된 데이터 세트이다.
-
Sklearn에서
RandomForestClassifier제공
랜덤 포레스트 하이퍼 파라미터 튜닝
-
트리 기반 앙상블 알고리즘의 단점 중 하나는 하이퍼 파라미터가 너무 낳고 그로 인해 튜닝을 위한 시간이 많이 소모된다는 것이다.
-
랜덤 포레스트 하이퍼 파라미터
n_estimators: 결정 트리 개수max_features,max_depth,min_samples_leaf,min_samples_split와 같은 결정 트리 파라미터와 똑같이 적용
-
GridSearchCV로 랜덤 포레스트의 하이퍼 파라미터 튜닝을 할 수 있다.
