정렬(Sorting)
| 이름 | 평균 시간복잡도 | 최악 시간복잡도 | Stability | In-place | 활용 상황 |
|---|---|---|---|---|---|
| Bubble sort | O(n2) | O(n2) | stable | in-place | |
| Selection sort | O(n2) | O(n2) | unstable | in-place | 작은 배열에서, 쓰기(swap) 비용이 클 때 활용 |
| Insertion sort | O(n2) | O(n2) | stable | in-place | 일반적으로 작은 배열에서 활용 |
| Quick sort | O(nlgn) | O(n2) | unstable | in-place | 원시 타입 배열에서, 최악 상황을 피할 수 있을 때 활용 |
| Merge sort | O(nlgn) | O(nlgn) | stable | not in-place | 참조 타입 배열에서 활용 |
| Heap sort | O(nlgn) | O(nlgn) | unstable | in-place | 원시 타입 배열에서, 자원적 한계가 클 때 활용 |
| Counting sort | O(n+k) | O(n+k) | stable | not in-place | 원소의 종류가 한정적일 때 활용 |
| Radix sort | O(w·n) | O(w·n) | LSD: stable MSD: unstable | not in-place | 자릿수가 있는, 이진 문자열이나 정수를 정렬할 때 활용 |
Quadratic sorts
평균 O(n2)의 시간복잡도를 갖는 정렬 알고리즘들
- 최선의 상황에 O(1)의 시간복잡도를 가진다는 장점이 있음
- 구현이 간단하여 크기가 매우 작은(10~20) 배열에서는 분할 정복 정렬들보다 빠르게 작동함
Bubble sort
각 원소에 대해서, 뒤로 가야하는 만큼 Swap을 거쳐 정렬하는 알고리즘
- 일반적으로 다른 정렬 알고리즘에 비해 성능이 떨어짐
Selection sort
각 인덱스에 대해서, 뒤의 원소들 중 최소값을 골라 Swap하여 정렬하는 알고리즘
- 거리가 먼 원소들을 Swap하므로 기존 순서가 바뀔 수 있음 (unstable)
- 일반적으로 Insertion sort에 비해 성능이 떨어지나, Swap 횟수가 더 적기 때문에 쓰기 비용이 클 때 사용함
Insertion sort
각 원소에 대해서, 앞의 원소들 중 자신보다 작은 값이 나올 때까지 Swap하여 정렬하는 알고리즘
- O(n2)이지만, 구현이 간단하여 크기가 매우 작은(10~20) 배열에서는 분할 정복 정렬들보다 빠르게 작동함
- 일반적으로 Selection sort에 비해 확인해야 할 원소 수가 적으므로, 비교적 성능이 좋음
O(nlgn) sorts
평균 O(nlgn)의 시간복잡도를 갖는 정렬 알고리즘들
- 구현이 복잡하지만, 일반적인 상황에서 가장 빠름
Quick sort
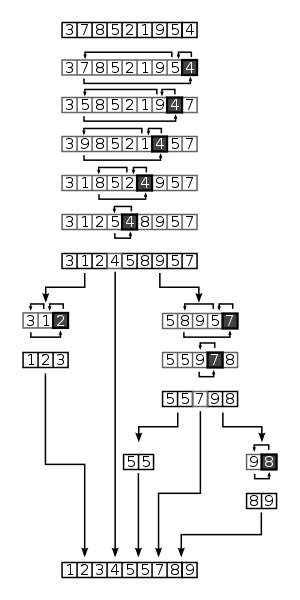
원소 중 하나를 피벗(pivot)으로 고르고, 피벗 앞에는 작은 값들이, 뒤에는 큰 값들이 오도록 하며, 피벗을 기준으로 분할하여 재귀적으로 정렬하는 알고리즘
- 거리가 먼 원소들을 Swap하므로 기존 순서가 바뀔 수 있음 (unstable)
- 추가 메모리를 적게 사용하므로, CPU 캐시 효율이 높음 (in-place)
- 배열이 이미 정렬되어 있을 때에는 O(n2)의 시간복잡도를 냄
- 이는 좋은 pivot 알고리즘을 사용함으로써 회피할 수 있음
- 단, 구현이 복잡해져 성능에 영향을 주므로, 작은 크기의 배열에는 Insertion sort를 사용하여 해결함
Merge sort

배열을 반씩 재귀적으로 나누고, 가장 작은 단위부터 차례대로 병합하여 정렬하는 알고리즘
- 원소를 하나씩 병합하므로 기존 순서가 바뀌지 않음 (stable)
- 분할로 인해 추가 메모리를 많이 사용하므로, CPU 캐시 효율이 낮음 (not in-place)
Heap sort

힙 자료 구조에 원소를 넣고 빼는 개념을 활용하여 정렬하는 알고리즘
- 추가 메모리를 덜 사용하는 in-place 알고리즘이므로, CPU 캐시 효율이 높음
- 최악의 경우에도 O(nlgn)의 시간복잡도를 내므로 Quick sort에 비해 안전하나, CPU 캐시 효율이 비교적 낮음
- 병렬 처리가 어려움
Non-comparative sorts
원소 간 비교 없이, O(n)의 시간복잡도를 갖는 정렬 알고리즘들
- 추가 메모리를 사용해야 하므로
Counting sort
원소의 종류마다 세어서 개수 순으로 정렬하는 알고리즘
- 뒤에서부터 정렬함으로써 기존 순서를 지킴 (stable)
- 원소의 종류가 많을 수록 비효율적임
Radix sort
원소의 각 자릿수 기준 정렬을 반복하여 정렬하는 알고리즘
- LSD(Least significant digit): 낮은 자릿수부터 확인함
- 자릿수 차이가 큰 경우, 보는 자릿수가 높아질 수록 봐야할 원소 수가 줄어드므로 비교적 빠름
- MSD(Most significant digit): 높은 자릿수부터 확인함
- 자릿수가 정해진 경우, 단번에 많은 원소를 정렬하므로 비교적 빠름
분할 정복(Divide-and-conquer)
문제를 작은 문제들로 재귀적으로 분할함으로써 간단히하여 해결하는 알고리즘 설계 전략
- 하위 문제의 최적해를 결합하여 해결
- 예시: Merge sort, Quick sort
Dynamic programming
수학적 최적화와 컴퓨터 프로그래밍을 통한 알고리즘 설계 전략
- 하위 문제의 최적해로 상위 문제의 최적해를 결정
- Memoization: 각 연산에 대한 결과를 저장하여 나중에 활용함 (중복 계산 방지)
- 접근법:
- Top-down: 상위 문제를 해결하기 위해 하위 문제에 대해 재귀 호출
- Bottom-up: 하위 문제부터 풀어가면서 상위 문제까지 최적해를 쌓아감
- 예시: 피보나치 수열, 0-1 Knapsack problem, Floyd-warshall algorithm
Greedy algorithm
각 단계마다 순간적으로 최적인 선택을 이어가는 알고리즘
- 일반적으로 최종적인 최적해를 내지는 않고, 합리적인 시간 내에 근사적인 최적해를 내기 위해 활용함
- 예시: Prim's algorithm, Kruskal's algorithm
Prim's algorithm

가장 가까운 노드를 선택해가면서 최소 스패닝 트리를 구하는 알고리즘
- Dijkstra's algorithm을 통해 가까운 노드 순으로 선택함
- 모든 노드를 살펴보므로, 간선이 더 많은 밀집 그래프에 적합함
- 시간복잡도 O(V2)
- 바이너리 힙과 인접 리스트를 활용하면 O(ElgV)
- Dijkstra's algorithm과 시간복잡도가 같음
Kruskal's algorithm

가장 짧은 간선을 선택해가면서 최소 스패닝 트리를 구하는 알고리즘
- Disjoint-set 자료 구조를 통해 사이클을 검사함
- 모든 간선을 살펴보므로, 노드가 더 많은 희소 그래프에 적합함
- 시간복잡도 O(ElgE)
- 이는 O(VlgV)와 O(V2lgV)의 사이임 (∵ V-1 ≤ E ≤ V(V-1)/2)
Backtracking
function backtrack(c):
if reject(P, c) then return
if accept(P, c) then output(P, c)
s := first(P, c)
while s ≠ NULL do
backtrack(s)
s ← next(P, s)조건을 만족하는 해들을 구하기 위해, 유망한 후보들을 점진적으로 검사하는 알고리즘
- 후보가 유망한지 알 수 있는 문제에 적합함
- Brute-force search에 비해 후보 수를 크게 줄이므로 효율적임
- 상태 공간을 DFS로 살펴봄으로써 해결함
- 예시: Eight queens puzzle, Crosswords
Branch and bound
하나의 최적해를 구하기 위해, 제한 범위 내의 후보들을 점진적으로 검사하는 알고리즘
- 상태에 대한 하한(lower bound) 혹은 상한(upper bound)을 결정할 수 있는 문제에 적합함
- 상태 공간을 BFS 혹은 Best-first search로 살펴봄으로써 해결함
- 예시: Dijkstria's algorithm
Shortest path problem
노드 간 최단 거리를 구하는 알고리즘
Dijkstra's algorithm

음의 가중치가 없는 그래프에서, 한 노드에서 다른 모든 노드로의 최단 비용(SSP)을 구하는 알고리즘
- 시간복잡도 O(V2)
- 바이너리 힙과 인접 리스트를 사용하면 O(ElgV)
function Dijkstra(Graph, source):
dist[source] ← 0 // 출발 정점에 대해 초기화
create vertex priority queue Q // 거리에 대한 Min-heap
for each vertex v in Graph:
if v ≠ source
dist[v] := INF
Q.add(v, dist[v])
while Q is not empty:
(u, cost) := Q.extract_min() // 다음으로 가장 빠른 정점
if dist[u] > cost // 갱신되었다면 무시함
continue
for each neighbor v of u:
alt := dist[u] + length(u, v)
if alt < dist[v]
dist[v] := alt // 이미 큐에 있는 v들은 앞으로 무시될 것임
Q.add(v, alt)
return distBellman-ford algorithm

음수 사이클이 없는 그래프에서, 한 노드에서 다른 모든 노드로의 최단 비용(SSP)을 구하는 알고리즘
- 시간복잡도 O(VE)
- 음의 가중치가 있는 그래프에서 활용할 수 있음
function BellmanFord(list vertices, list edges, vertex source):
dist := list of size n
// Step 1: 초기화
for each vertex v in vertices:
dist[v] := INF
dist[source] := 0 // 출발 정점에 대해 초기화
// Step 2: 완화(Relaxation)
repeat |V|−1 times:
for each edge (u, v) with weight w in edges:
if dist[u] + w < dist[v]
dist[v] := dist[u] + w
// Step 3: 음수 사이클 확인을 위해 같은 내용 한 번 더 실행
for each edge (u, v) with weight w in edges:
if dist[u] + w < dist[v]
error "Graph contains a negative-weight cycle"
return distFloyd-warshall algorithm
각 노드에서 다른 모든 노드로의 최단 비용(ASP)을 구하는 알고리즘
- 시간복잡도 O(V3)
- 음수 사이클이 없는 그래프에서만 활용할 수 있음
let dist be a |V| × |V| array of minimum distances initialized to INF
for each edge (u, v):
dist[u][v] := w(u, v) // u에서 v로 가는 정점의 가중치
for each vertex v:
dist[v][v] := 0
for k from 1 to |V|:
for i from 1 to |V|:
for j from 1 to |V|:
if dist[i][j] > dist[i][k] + dist[k][j]
dist[i][j] := dist[i][k] + dist[k][j]