[ 리눅스_v1 ]
_**Step 1) 리눅스 설치는 잘 하니깐... 패스.
.
.
.
_**Step 2) 환경 설정
- vim 설치 : $ sudo apt install vim
- 패키지 서버 변경 sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
. - $ sudo vi /etc/apt/sources.list
1) :%s/us.archive.ubuntu.com/mirror.kakao.com/g
2) :%s/security.ubuntu.com/mirror.kakao.com/g
3) $ sudo apt update
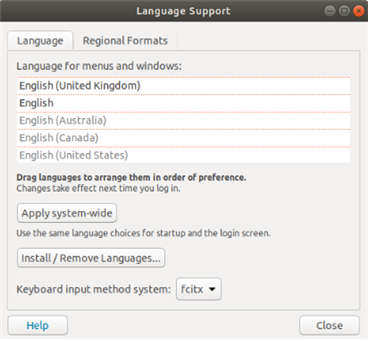
_**Step 3) 한글 설정
- 첫번째 방법
- 두번째 방법 (ficitx)
1) $ sudo apt-get update
2) $ sudo apt-get install fcitx-hangul
3) $ sudo reboot
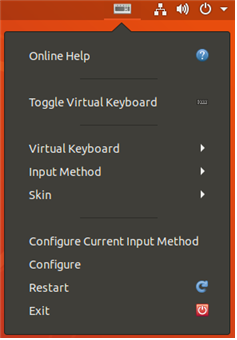
4) 재부팅 후 우측 상단에 키보드 아이콘이 생긴것을 알 수 있다.
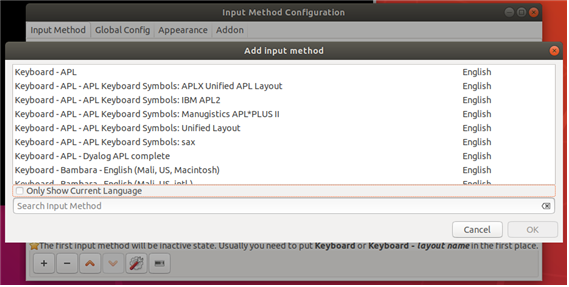
5) +를 누르고 "Only Show Current Language” 체크박스에 해제 후 ‘hangul’를 추가
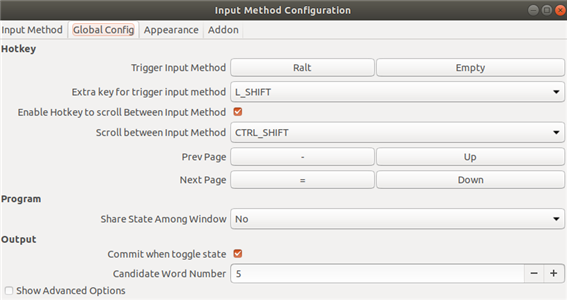
6) Global Config 탭으로 이동하고 Trigger Imput Method에 첫 번째 칸을 눌러 원하는 키 선택
_**Step 4) 크롬 설치
1) $ wget -q -O - https://dl-ssl.google.com/linux/linux_signing_key.pub | sudo apt-key add -
2) $ sudo sh -c 'echo "deb [arch=amd64] http://dl.google.com/linux/chrome/deb/ stable main" >> /etc/apt/sources.list.d/google.list’
3) $ sudo apt-get update
4) $ sudo apt-get install google-chrome-stable
5) $ sudo rm –rf /etc/apt/sources.list.d/google.list
6) $ sudo apt-get clean
7) $ sudo apt-get update
_**Step 5) ROS 설치
1) $ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list’
2) $ sudo apt install curl
3) $ sudo apt update
● key가 없다고, 유효하지 않다고 뜬다. 그러면 에러 메시지에 떳던 키를 복사후
4) $sudo apt-key adv --keyserver keyserver.ubuntu.com —recv-keys xxxxxxxxxxxxxxx
-> 그러면
5) $ sudo apt install ros-melodic-desktop-full
6) $ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
7) $ source ~/.bashrc
8) $ source /opt/ros.melodic/setup.bash
9) $ sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
10) $ sudo apt install python-rosdep
11) $ sudo rosdep init
12) $ rosdep update
_**Step 5-1) 작업 폴더 생성 및 초기화
1) $ mkdir -p ~/catkin_ws/src
2) $ cd ~/catkin_ws/
3) $ catkin_make
-
bash 저장
1) $ source devel/setup.bash -
정상 설치 확인
1) roscore
_**Step 5-2) bashrc 파일 편집
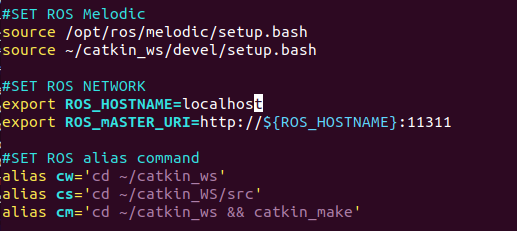
1) $ sudo vi ~/.bashrc
#SET ROS Melodic
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash
#SET ROS NETWORK
export ROS_HOSTNAME=localhost
export ROS_mASTER_URI=http://${ROS_HOSTNAME}:11311
#SET ROS alias command
alias cw='cd ~/catkin_ws'
alias cs='cd ~/catkin_WS/src'
alias cm='cd ~/catkin_ws && catkin_make’
위 내용을 추가 해주면 된다.
_**Step 5-3) IDE 설치
1) $ sudo apt-get install curl
2) $ sudo sh -c 'curl https://packages.microsoft.com/keys/microsoft.asc | gpg --dearmor > /etc/apt/trusted.gpg.d/microsoft.gpg’
3) $ sudo sh -c 'echo "deb [arch=amd64] https://packages.microsoft.com/repos/vscode stable
main" > /etc/apt/sources.list.d/vscode.list’
4) $ sudo apt-get update
5) $ sudo apt-get install code
6) $ sudo rm /etc/apt/sources.list.d/vscode.list
• 한글폰트 설치
7) $ sudo apt-get install fonts-nanum*
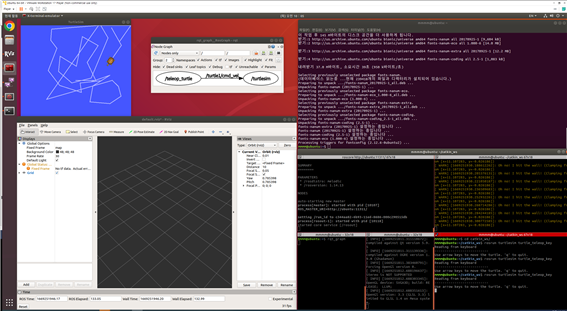
_**Step 5-3) ROS Test
(Terminator에서 각각 다른 터미널에서 한 개씩 명령)
.
- 동작
1) $ roscore
2) $ rosrun turtlesim surtlesim_node
3) $ rosrun turtlesim turtle_teleop_key
- 모니터링
1) $ rqt_graph
2) $ rviz
==> 
_**Step 6) Gazebo
1) $ sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable lsb_release -cs main" > /etc/apt/sources.list.d/gazebo-stable.list’
2) $ wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
3) $ sudo apt-get update
4) $ sudo apt-get install gazebo9
5) $ sudo apt-get install libgazebo9-dev
6) $ gazebo
- 한번에 설치시
1) $ curl -ssL http://get.gazebosim.org | sh
● 만일 Gazebo를 실행했을 때 이런 Error 메시지가 나오면 ignition-math 버전이 낮아서 발생하는 경우..
그러면
1) $ sudo apt upgrade libignition-math2
2) $ gazebo
-> 결과로는
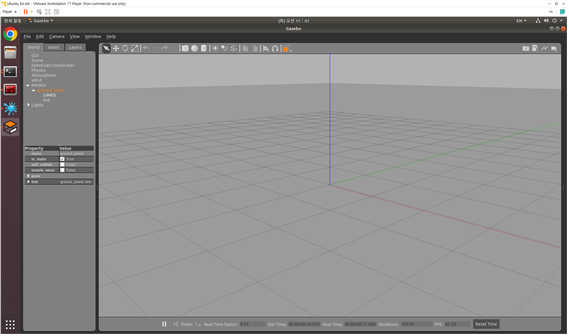
= 아무렇지 않게 Errror 없이 Gazebo가 실행되는 것을 알 수 있다.
