YongBeeat
1.10/24 화요일 - 출근 6일차

< Step 1 > 하이퍼 터미널> 환경설정하기\`1) .exe 실행hyperterm 실행 1-1) 원하는 이름 설정 -> ok1-2) connect to 설정참조https://m.blog.naver.com/littledream1/2220573999372
2.11/07 월요일 - 출근 16일차
Window Ardupilot 개발환경 설정 Step 1) Cygwin 설치하기\-> 리눅스 프로그램/유틸리티를 윈도우에서 사용할 수 있도록 하는 프로그램 중 하나다.\-> 밑에 주소에 들어간다.https://ardupilot.org/dev/docs/buil
3.11/21 월요일 - 출근 26일차
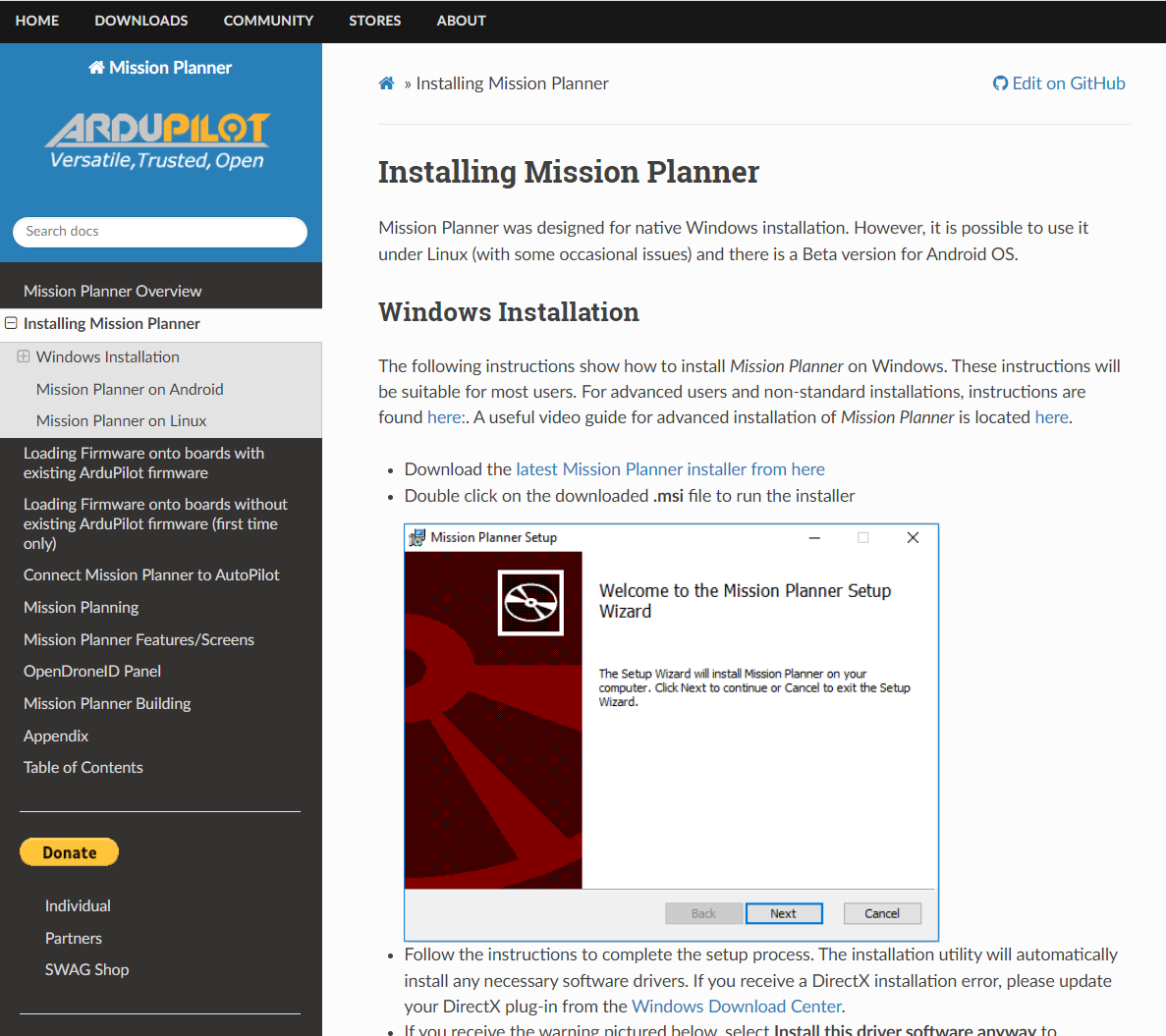
Window Ardupilot 개발환경 설정\_ver.1\_\*\*Step 1) Misson Planner 설치하기\-> 윈도우용 mission planner를 설치한다. https://ardupilot.org/planner/docs/mission-plann
4.11/22 화요일 - 출근 27일차

라즈베리파이 재설치 \_\*\*Step 1) 라즈베리파이 재설치\-> 기존에 내가 진행하였던
5.11/23 ~ 11/24
VMware 리눅스 \_\*\*Step 1) 리눅스 설치는 잘 하니깐... 패스....\_\*\*Step 2) 환경 설정vim 설치 : $ sudo apt install vim패키지 서버 변경 sudo cp /etc/apt/sources.list /etc/apt/so
6.11/25 금요일
리눅스\_v2 \_\*\*Step 1) QGC (QgroundControl) 설치=> https://docs.qgroundcontrol.com/master/ko/getting_started/download_and_install.html자동 설치 후 더블 클릭
7.11/28 월요일
아두파일럿 시뮬레이터 gazebo와 빌드 환경 연동 \_\*\*Step 1) 1) $ cd ~/catkin_ws/src2) $ git clone https://github.com/Jaeyoung-Lim/modudculab_ros.git3) $ cd ..4)
8.11/29 화요일

https://robonote.tistory.com/14Step 1) mavros 설치1) $ sudo apt-get update2) $ sudo apt-get install ros-melodic-mavros ros-melodic-mavros-extrasSte