Motivation
- 기존의 optimal transport for unsupervised DA 방법론들은 label을 제외한 source sample X만을 transport 시키고 있음
- 이러한 방법론들은 다음의 conditional distribution에 대한 성질이 성립함을 함축적으로 가정함. 즉,
- 는 OT mapping of sample
- <- 기존의 OT 방법이 성립하려면 이 가정을 따라야만 합리적임. - 다만, 기존의 OT mapping 에서는 이 가정이 굳이 성립해야 할 특별한 이유는 없음
- Proposal : Source와 Target의 결합분포를 Transport 시킨다:
ㄴ 이렇게 하면 위의 문제점이 해결 되는가???
ㄴ Target의 label 정보를 우리가 모르기 때문에 문제가 되고, 해결방안을 제시하고 있음.
JDOT
Kantorovich formulation을 응용하면, 제안하는 방식은 다음과 같은 식으로 나타내어진다.
where
위 식의 해(최적의 )는 가 lower-semi continuous 일 때 존재함이 알려져 있다. (Supp. A 참고) 이 상황은 가 norm이고 이 일반적 loss일때 만족된다.
문제는, target data의 label은 우리가 알 수 없다는 점인데,
우리의 목적은 target data에 대하여 잘 동작하는 classifier f를 찾는 것이라는 것을 상기하자. 이를 이용하여, target의 label 로 근사시키자.(아마 f는 sample 분포에서 학습된 classifier일 것이다).
그리고 근사된 joint distribution 로 적도록 하자.
위의 문제를 empirical distribution과 에 대하여 다시 쓰면
.
현실에서는, f의 overfitting 방지를 위해 f에 추가적인 제약조건이 걸리기도 한다.
Comparison with other OT based DA methods
- JDOT에서는 굳이 barycentric mapping을 찾을 필요가 없음
ㄴ 직접 f를 구하려고 시도하기 때문.
ㄴ barycentric mapping은 두 분포 사이에 wasserstein distance를 근사적으로 줄일 뿐이므로, 이론적 배경이 JDOT에 비해 부족함
A bound on the target error
JDOT를 통해 구해진 f에 대한 이론적 성질을 보인다.
Notation
: hypothesis in hypothesis space
Assumption
은 Bounded, symmetric, k-lipschitz이며 triagular ineq.을 만족함을 가정
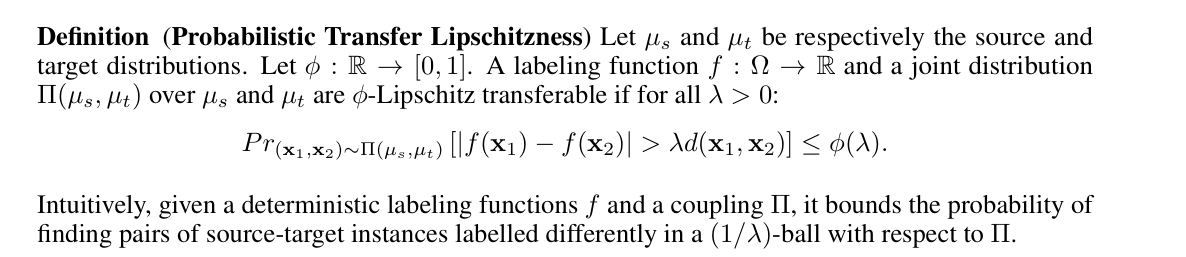
또한, 기존 lipschitz 조건의 확장인 probabilistic lipschitz라는 개념을 도입한다.
f가 prob.libschitzness를 만족한다는 것은, 가까운 두 객체가 비슷한 함수값을 높은 확률로 가진다는 것을 모델링 할 수 있다.
Main theorem
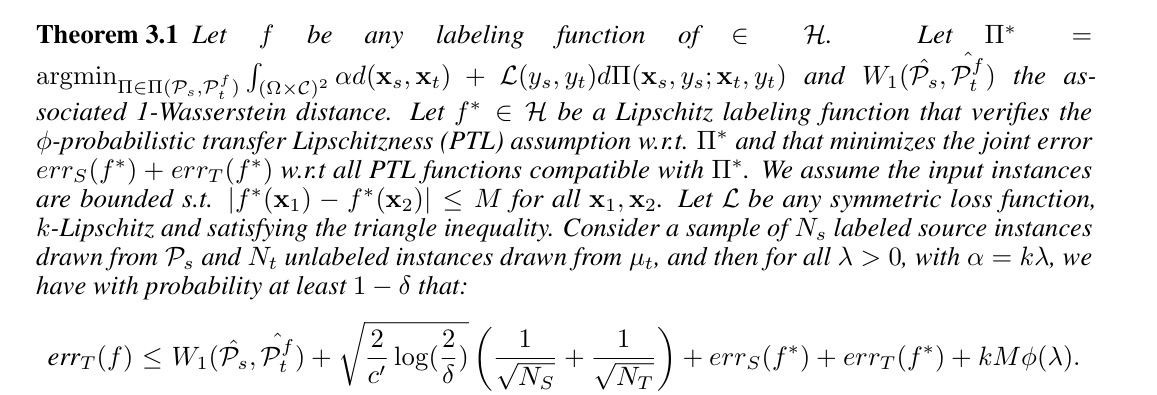
(증명은 supp.B에 적어둔다)
의미를 해석해보자.
- 는 임의의 labeling function.
- 는 사이의 optimal coupling.
- 는 다음 조건 만족
ㄴ Lipschitz labeling function
ㄴ 에 대해 probabilistic transfer lipschitzness 만족
ㄴ 위 조건 만족시키는 f 중 를 최소화시킴
ㄴ for some - : symmetric, k-lipschitz, satifies triangle ineq.
즉, 를 최소화함으로서, 가 작아진다는 의미이다.
Learning with JDOT
다음과 같은 setting을 고려한다
- 는 RKHS or Parameterized 될 수 있는 함수들의 집합이다.
ㄴ 이러한 함수 클래스는 linear model, NN, kernel methods 등을 포함함. - regularization term
ㄴ 주로 squared norm 에 대한 비감소 함수. - 추가적으로 에 대한 regularization도 생각할 수 있다
ㄴ entropic / group-lasso... - 은 continuous / differentiable
풀어야 하는 최적화 문제는 다음과 같다.
Optimization procedure
-
와 에 대해서 따로따로 최소화시키는 것이 가장 일반적인 방법이다
ㄴ Block Coordinate Descent(BCD) or Gauss-Seidel Method -
가 고정되어 있는 경우, 이는 classical OT문제가 되며
ㄴ network simplex algorithm / regularized OT / stochastic OT.. 등으로 풀 수 있다. -
가 고정되어 있는 경우,
와 같은 식을 최적화 하는 문제
ㄴ 개의 항을 가지므로 computationally expensive
ㄴ Loss를 잘 고르면 complexity 줄일 수 있다.(추후 설명)
ㄴ 가 RKHS일 때, represeneter theorem에 의하면, 위와 같은 최적화 문제의 해는 의 형태로 표현되고, 즉 개의 parameter을 최적화시키는 문제가 된다.
ㄴ 2-block Gauss-Seidel method로 최적화 가능하다고 한다.
Supplementary materials
A. optimal 의 존재성
B. Proof of the main theorem
(업데이트 예정)
