Installation
# Install 3rd-party dependencies
sudo apt-get update
sudo apt-get install libusb-dev libusb-1.0-0-dev -y
sudo apt-get install libglfw3 libglfw3-dev -y
sudo apt-get install freeglut3 freeglut3-dev -y
# Debian package installation
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo apt-get update
sudo apt-get install librscalibrationtool -y
# Checking package installation
sudo dpkg -L librscalibrationtool- 실행결과
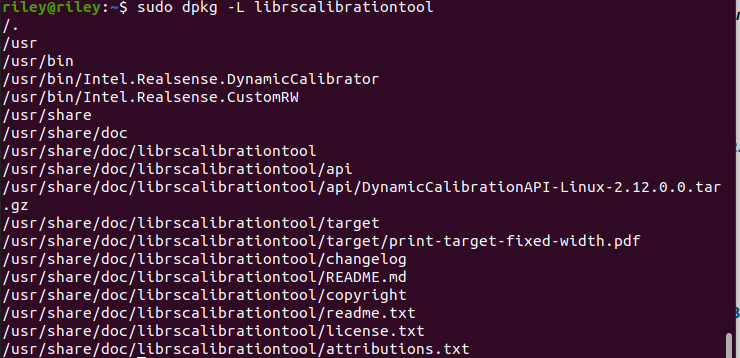
실행
/usr/bin/Intel.Realsense.DynamicCalibrator- 실행결과
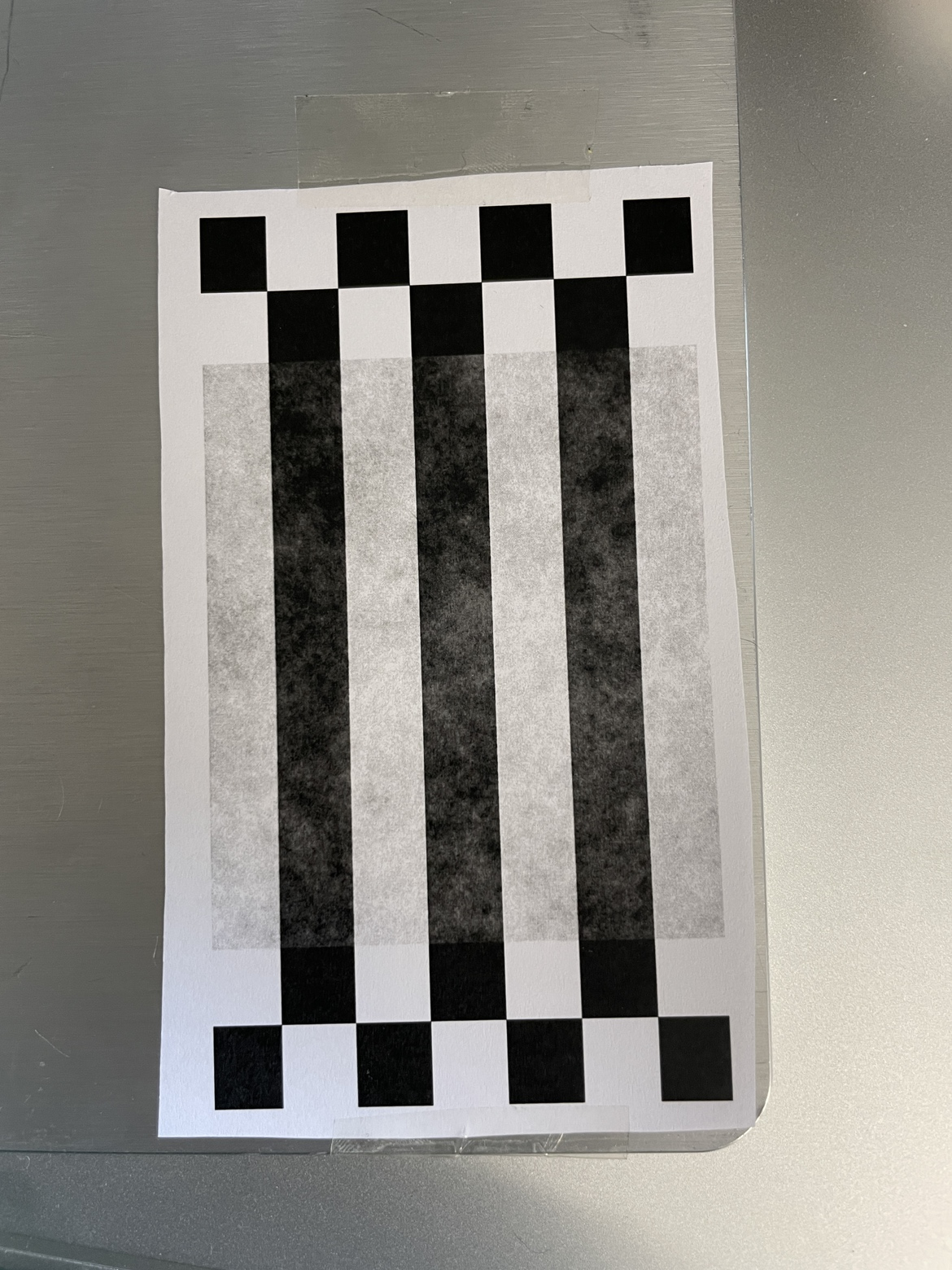
캘리브레이션를 위한 target 준비
- target 프린트하기 target 파일 다운로드 링크 [2]
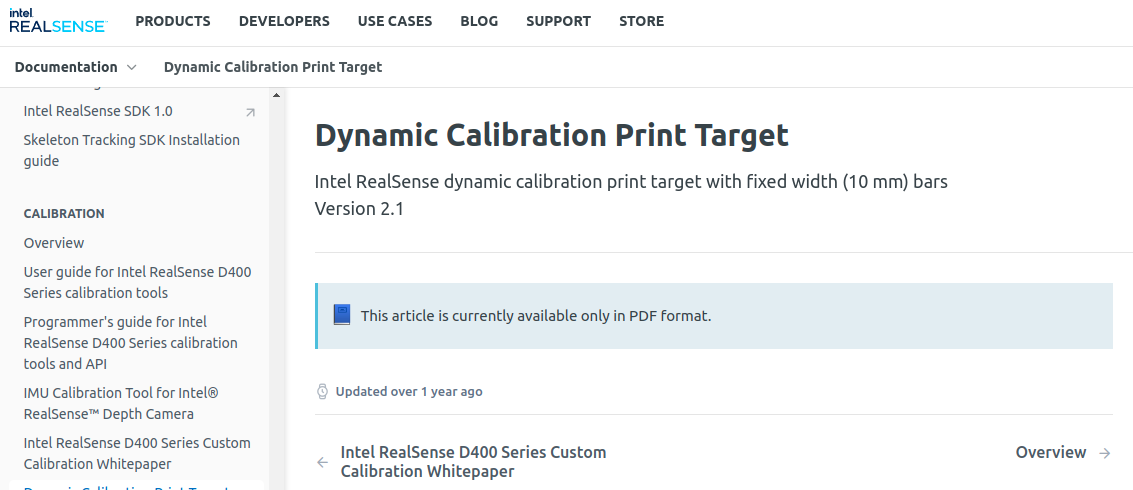
- 파란 박스 내 PDF format 글씨 클릭
- 프린트 시 실제 사이즈로 설정하여 프린트 - 휘어지지 않는 평평한 물체에 부착
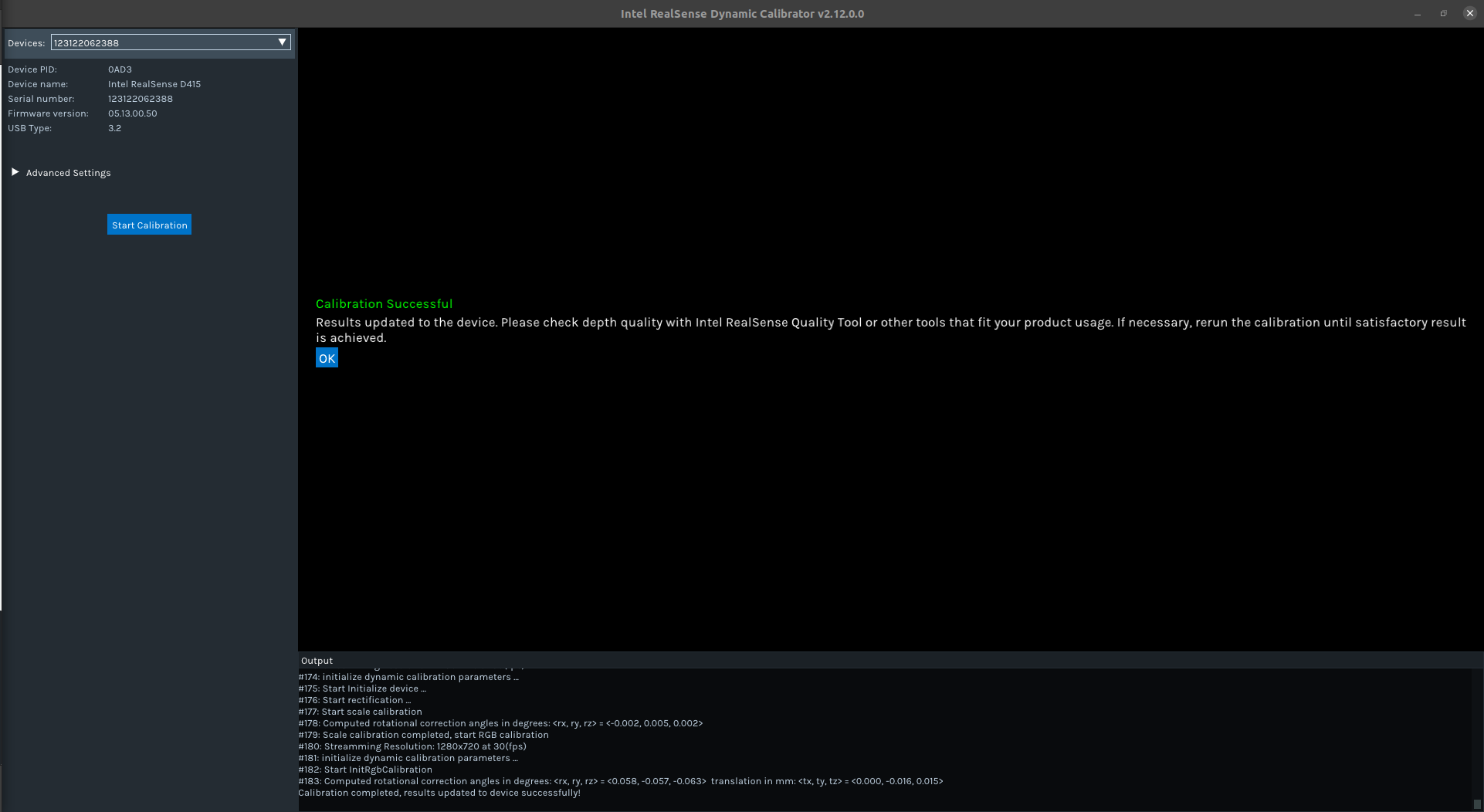
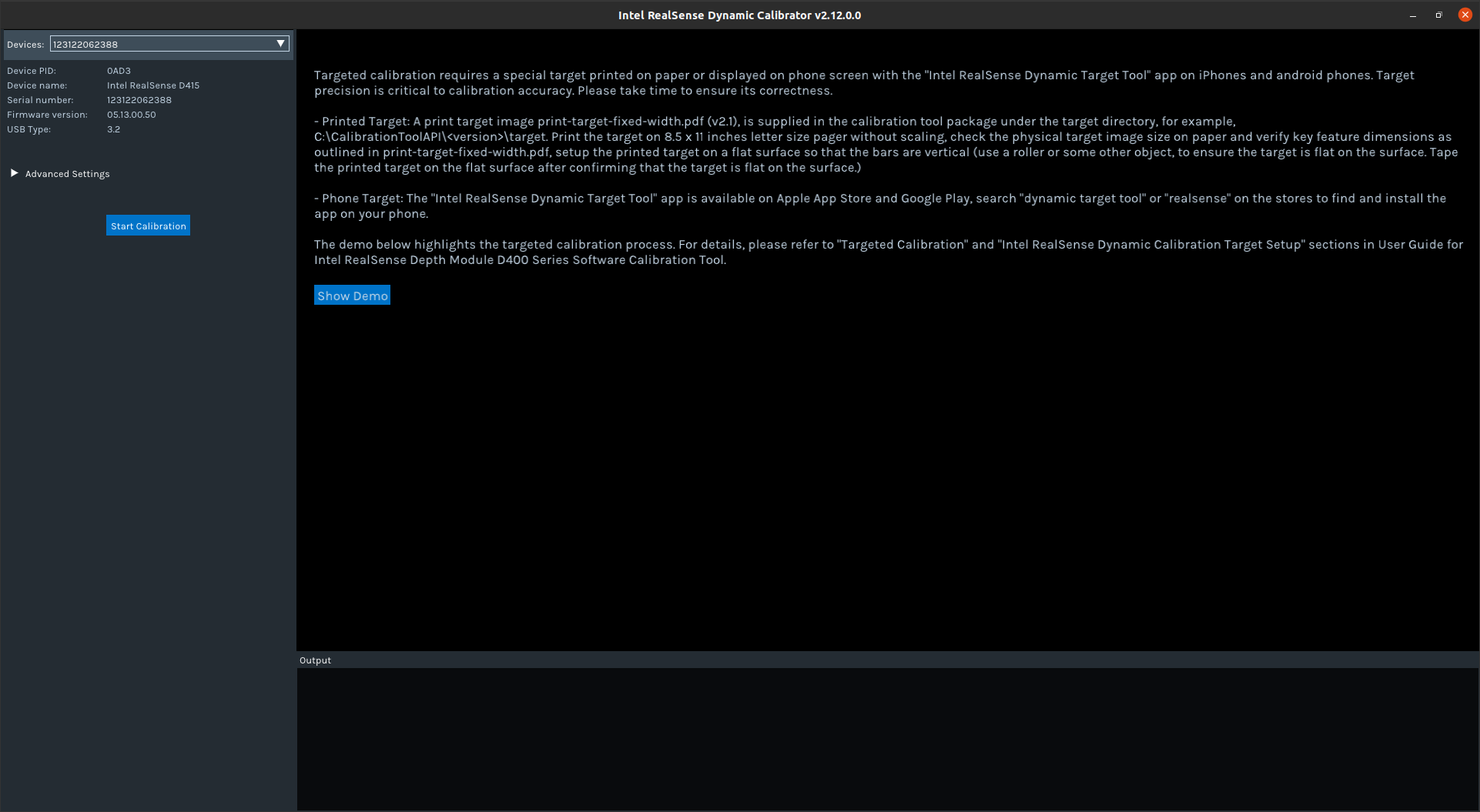
캘리브레이션
-
Start Calibration 버튼
-
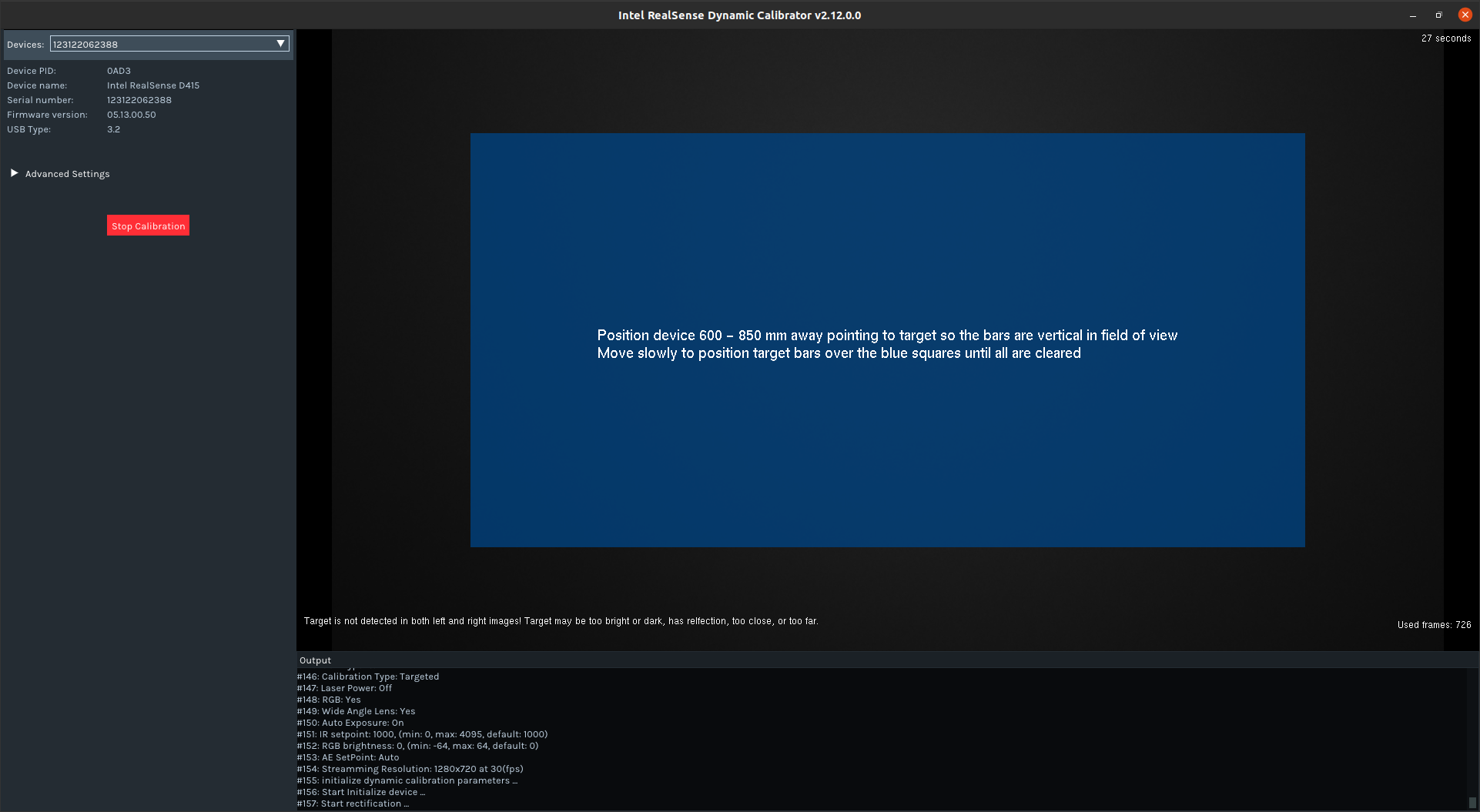
카메라와의 거리가 600-850mm인 곳에 아래의 target 사진과 같이 수직이 되도록 배치
- 배치한 target이 캘리브레이션 툴에서 보이는 파란 박스 내에 위치해야 함 -
캘리브레이션 툴 내 파란 박스가 투명한 영역으로 바뀔때까지 target을 좌우, 상하로 움직이기
-
파란 박스가 모두 투명해진 뒤, 아래 나타나는 초록색 progress bar를 보며 target 좌우 상하로 움직이기 * 두번 반복
-
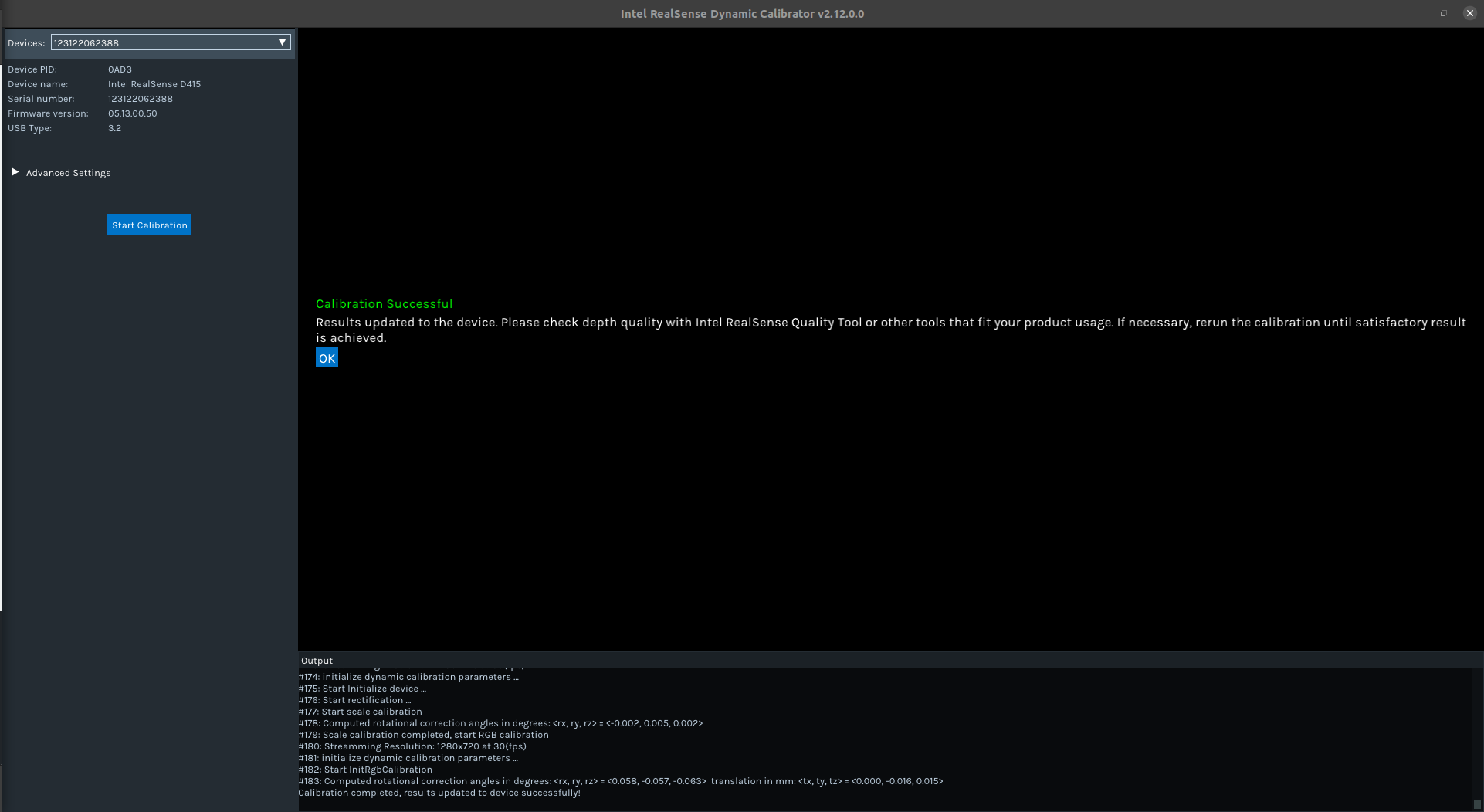
캘리브레이션 완료
Reference

이 도비는 이제 공짜가 아닙니다