[논문 리뷰]Bimanual Handling of Deformable Objects With Hybrid Adhesion
Abstract
이 논문은 변형 가능한 물체를 다루기 위한 하이브리드 접착 엔드 이펙터를 사용한 양손 로봇의 조작에 중점을 둔 연구입니다. 이 시스템은 물체를 부드러운 또는 불규칙한 표면에 정렬하면서 접착력을 효율적으로 활용하기 위해 넓은 접촉 면적을 유지하고자 합니다. 이러한 접착 시스템은 일반적으로 쿨롱 마찰 또는 얇은 엔드 이펙터를 사용하여 물체를 잡는 데 의존하며, 부드러운 물체를 파지할 때 과도한 파지력을 적용하지 않아야 합니다.
I. INTRODUCTION
소프트 그립은 작동, 강성 제어, 접착 제어와 같은 세 가지 기술로 분류됩니다. 이 논문은 접착력을 사용한 파지에 중점을 두며, 이것은 물체의 형태를 고려하지 않고 부드러운 물체를 파지하는데 유용합니다.
여기서 언급된 세 가지 접착 기술은 흡입, 정전기 접착 및 건식 접착입니다. 흡입은 높은 접착력을 제공할 수 있지만 다공성 물질에서 효과적이지 않으며 거친 표면에서 성능이 좋지 않습니다. 정전기 접착은 매우 적은 전력을 사용하면서 부드러운 접촉과 접착력을 제공하지만 들어 올릴 수 있는 물체의 무게에 제한이 있습니다. 건식 접착제는 게코에서 영감을 받았으며, 반데르발스 힘에 의존하여 내부 응력이 거의 없는 높은 값의 전단 접착력을 제공합니다. 그러나 건식 접착제는 두 표면이 매우 가까울 때만 작동하며 실제 접촉 면적이 작은 표면에서는 성능이 좋지 않습니다.
이러한 제한을 극복하기 위해 전기 접착과 건식 접착을 결합하는 것이 제안됩니다. 전기 접착은 초기 접착 필름을 표면에 끌어당기는 데 유용하며, 접촉 후에는 건식 접착제의 특성을 부드럽게 사용하여 물체를 파지합니다. 그러나 이러한 두 가지 기술을 통합하는 것은 여전히 어려운 과제입니다.
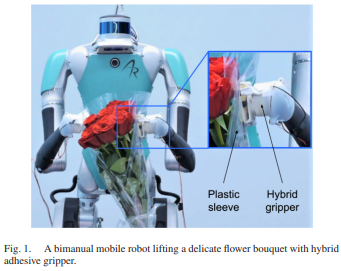
본 연구는 하이브리드 접착력을 사용하는 로봇의 양손으로 변형 가능한 물체를 다루기 위한 경량 파지 시스템을 제시합니다. 이 연구는 물체의 형태를 고려하고, 낮은 법선력으로도 물체를 파지할 수 있는 가벼운 시스템을 설계하며, 이를 통해 휴머노이드 로봇이 다양한 부드러운 물체를 안전하게 들어올릴 수 있음을 시연합니다.
II. TECHNICAL APPROACH
A. Consideration of Surface Variation
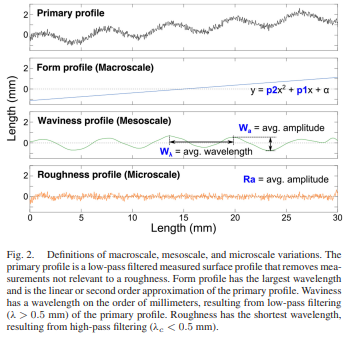
표면은 공간 파장의 범위[16]로 구성되어 있으며 다양한 대역폭으로 나눌 수 있습니다. [17], [18]을 적용하여 형태, 파형, 거칠기를 각각 거시적 규모, 중간 규모 및 미세 규모의 파장 구성 요소로 정의합니다(그림 2).
거칠기와 파형을 구분하는 차단 파장을 λc라고 합니다. 더 짧은 파장의 경우 거칠기는 일반적으로 조도곡선의 진폭을 평균하여 마이크로미터 단위의 Ra로 표시됩니다. 더 긴 파장의 경우, 현재 애플리케이션에서는 밀리미터 단위로 평균 진폭(Wa)과 파장(Wλ)이라는 두 가지 값을 사용하여 표면 파형를 정의합니다. 진폭은 평균 피크 대 피크(양진폭) 값이고 파장은 파형의 평균 길이입니다. 센티미터 단위의 스케일에서 대상 물체의 표면과 엔드 이펙터 표면 사이의 각도 오프셋을 포함하는 표면 프로파일을 근사화하기 위해 2차 다항식을 사용하여 형태를 정의합니다.
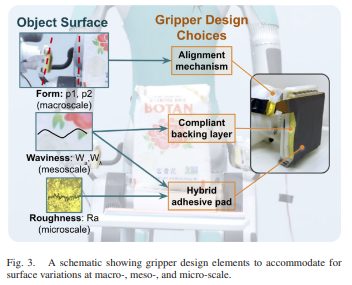
물체 형태, 표면 파형 및 거칠기의 변화를 수용하는 그리퍼의 주요 기능을 정의합니다(그림 3에 요약되어 있음).
B. Mechanism Design
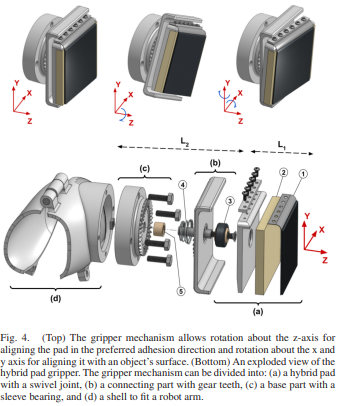
그리퍼에는 접착 패드를 (i) 선호하는 접착 방향으로 정렬하거나 (ii) 관심 대상 표면에 접하도록 정렬하는데 필요한 두 개의 독립적인 메커니즘이 있습니다.
1) Aligning Gecko Adhesive Direction:
게코 접착 패드(그림 4의 부품 (1))를 중력 방향으로 정렬하는 것입니다. [11]에서는 접착력이 직교하는 방향보다 선호되는 방향에서 1/3 더 높은 것으로 나타났습니다.
그림 4의 (c)(5) 부분에 있는 회전 조인트(PTFE 슬리브 베어링)는 (a)와 (b)가 z축을 중심으로 회전할 수 있게 해줍니다. (a)와 (b)의 질량 중심은 회전축 아래에 있습니다. 따라서, gecko wedges의 방향을 아래로 회전시켜 정렬하면 물체를 들 때 최대 전단 접착력을 활용할 수 있습니다. 이 관절은 가벼운 힘으로 물체를 쥐고 있는 동안 제자리에 고정될 수 있습니다. (b)와 (c)의 마주보는 표면에 톱니가 있습니다. 압착 동작(접착 패드를 -z 방향으로 밀기)으로 인해 클러치 기어가 맞물립니다. 이 잠금 메커니즘은 들어 올리는 동안 패드와 물체가 회전하는 것을 방지하는 데 필요합니다. 클러치 기어를 완전히 결합하는 데 필요한 힘은 원추형 스프링(부품(4))과 스프링 사이의 간격에 의해 결정됩니다. 스프링은 또한 그리퍼가 표면에 닿기 전에 기어가 맞물리는 것을 방지합니다. 섹션 IV의 Digit 로봇을 사용한 테스트에서 기어를 완전히 맞물리는 힘은 1.5N으로 측정되었습니다.
2) Aligning With Object’s Surface:
가장 앞쪽 부분(그림 4의 a)을 고정하는 회전 조인트(부품 (3))가 포함되어 있어 그리퍼가 물체의 xy 평면과 정렬할 수 있습니다. 이 조인트는 물체 표면과 접착 패드 사이의 거시적인 각도가 정렬되지 않으면 보정 합니다. 프로토타입은 y축 기준으로 ±10도 회전하고 x축 기준으로 -3~+10도 회전하도록 설계되었습니다. 물체를 들어 올릴 시 아래 방향으로 모멘트가 가해질 때 관절이 과도하게 회전하는 것을 방지하기 위해 x축 회전을 제한했습니다. 이러한 원하지 않는 회전이 발생하더라도 접착 패드는 (a)의 전면이 아닌 (a)의 윗면에 고정되어 대상물에 달라붙기 때문에 접촉 면적을 유지할 수 있습니다. 회전량은 섹션 IV의 Digit 테스트를 통해 최적화되었습니다. 로봇이 견뎌야 하는 x축에 대한 모멘트를 줄이기 위해 그림 4의 L2를 실용적인 정도로 최소화하는 것이 바람직합니다.
C. Backing Layer
하이브리드 패드는 전압을 가할 때 부드러운 수직력을 생성할 수 있지만 접착제 뒤에 호환 레이어가 추가되면 표면의 중규모 불균형(파상)을 정렬하는 데 도움이 될 수 있습니다. 지지층은 대상 표면의 몇 밀리미터 높이 변화를 수용할 수 있을 만큼 부드러워야 합니다. 폼((2) 부분)은 하이브리드 패드의 상단을 클램핑하는 (a)의 단단한 부분보다 1.35mm 더 두꺼워서 하이브리드 패드가 그리퍼의 단단한 어떤 부분도 방해하지 않고 표면에 잘 맞도록 도와줄 수 있습니다. 목표 파지 압력이 1kPa 이하인 경우 평평한 물체를 가정하여 단단한 부분까지 완전히 압축했을 때 1.2kPa의 상압을 제공하도록 폼 두께를 선택했습니다.
대상 물체의 범위와 필요한 정상적인 파지력의 양을 고려하여 폼의 두께와 강성을 선택하는 것이 중요합니다. 선택한 폼이 너무 얇거나 너무 부드러우면 단단한 부품으로 인해 패드 상단 영역에 원치 않는 집중 수직력이 생성됩니다. 더 부드러운 폼이 필요한 경우 하이브리드 패드에 보다 균일한 압력 분포를 생성하기 위해 두께 보상이 필요합니다(압력 ≤ 1kPa의 경우). 반대로 그림 4의 L1을 최소화하여 접착 패드의 박리 모멘트를 줄여야 하므로 폼이 너무 두꺼워서는 안 됩니다.
D. Hybrid Pad
하이브리드 정전기 접착 패드(부품 (1))은 정전기 접착과 반데르발스 접착을 결합하여 최대 60kPa의 전단 접착력을 제공합니다. 거친 표면의 접착 성능 저하와 Digit 로봇의 페이로드 제한(섹션 IV에서 소개)을 고려하여 패드 크기는 50mm x 50mm로 선택되었습니다. 이상적인 설정(우수한 접촉 조건 및 무제한 페이로드)에서 이 패드 크기는 부드럽고 평평한 표면에 150N의 전단 접착력을 제공할 수 있으며, 이는 두 개의 패드를 사용하여 30kg의 유효 탑재량에 해당합니다.
패드는 필름이 대부분 전단력으로 당겨지는 방식으로 상단에 고정되어(그림 4) 벗겨지는 것을 방지합니다. 필름이 수축되지 않도록 필름 뒷면을 폼에 부착하는 것을 피하고 보다 효과적인 형태를 가능하게 하여 하이브리드 패드가 전기접착의 도움으로 물체를 감싸도록 합니다. 이는 또한 부품 (a)와 대상물 사이에 정렬이 잘못되었을 때 벗겨질 위험을 줄여줍니다.
하이브리드 정전기 게코 접착 패드는 표준 건식 접착 시트를 구성하는 마이크로웨지 층으로 구성됩니다(그림 5(a) 참조). 웨지는 얇은 폴리머 필름 위에 주조됩니다. 피착체 표면과 처음 접촉할 때 변형되지 않은 웨지는 접촉 면적이 거의 없으며 끈적거리지 않습니다. 웨지가 전단 하중을 받을 때 건식 접착력이 작용하여 표면과의 실제 접촉 면적이 극적으로 증가합니다. 마이크로웨지에 대한 자세한 내용과 Van der Waals 힘을 활용하는 방법은 [15], [19]에 나와 있습니다.
V. CONCLUSIONS AND FUTURE WORK
양손 이동 로봇을 위한 새로운 하이브리드 접착 그리핑 시스템을 제시합니다. Digit 로봇을 사용한 테스트에서는 엔드 이펙터가 물체 형태, 표면 파형 및 거칠기의 변화를 수용할 수 있고 가벼운 일반 내부 파지력으로 넓은 접촉 영역을 달성할 수 있음이 나타났습니다. Digit의 원래 엔드 이펙터에 비해 힘을 10배 이상 줄일 수 있습니다. 이를 통해 로봇은 1.5N 미만의 파지력으로 최대 2.3kg의 변형 가능하거나 깨지기 쉬운 물체를 다룰 수 있습니다.
출처
