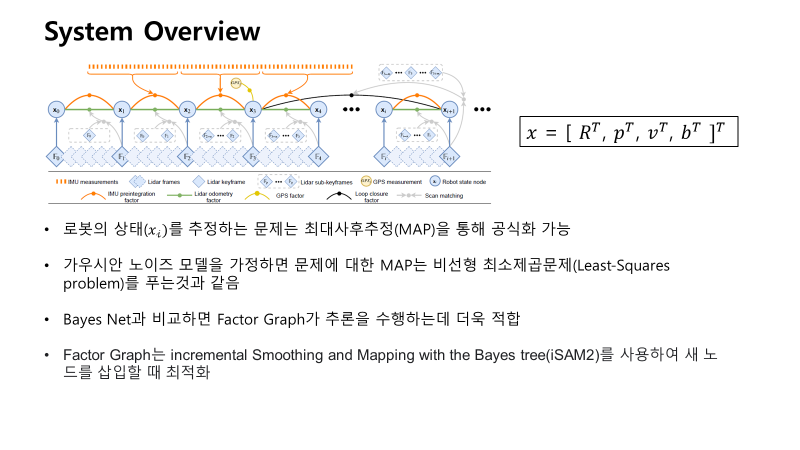
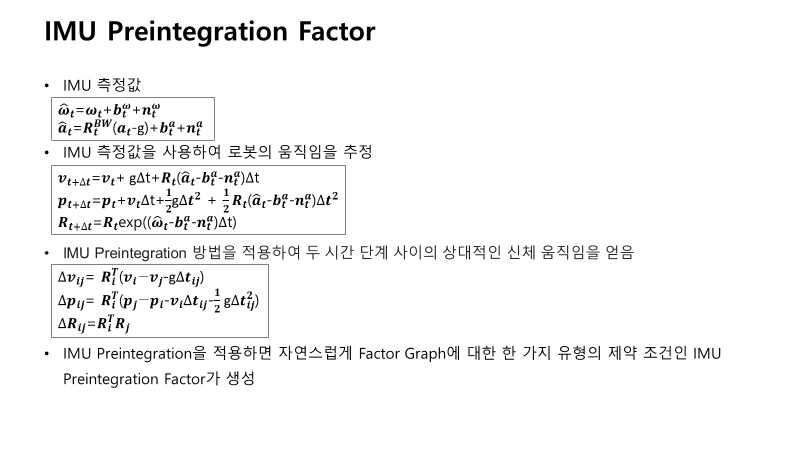
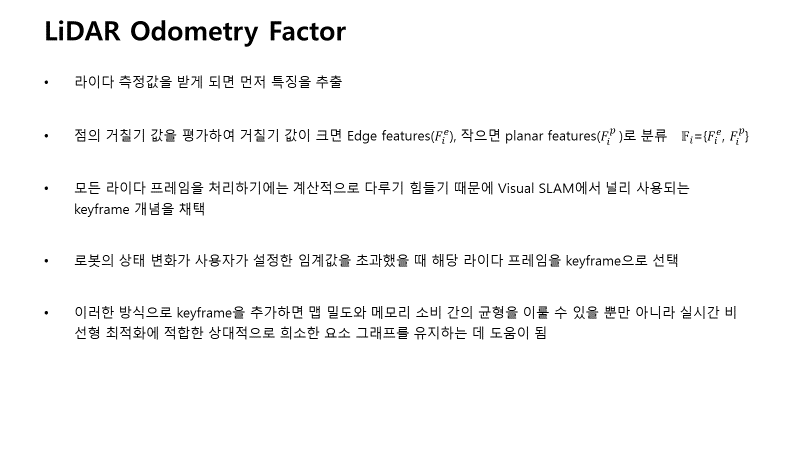
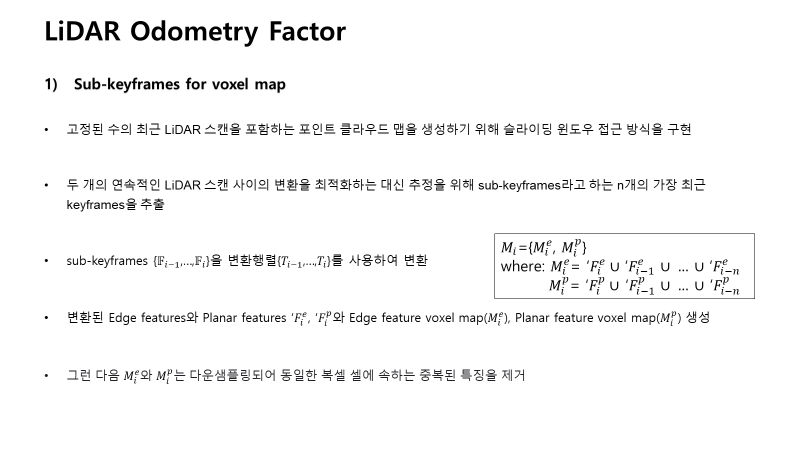
[논문리뷰]LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
Github을 통한 사용
https://github.com/TixiaoShan/LIO-SAM
의존성 설치
sudo apt-get install -y ros-noetic-navigation
sudo apt-get install -y ros-noetic-robot-localization
sudo apt-get install -y ros-noetic-robot-state-publishergtsam 라이브러리 설치
sudo add-apt-repository ppa:borglab/gtsam-release-4.0
sudo apt install libgtsam-dev libgtsam-unstable-dev설치
cd ~/catkin_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd ..
catkin_make
source ~/catkin_ws/devel/setup.bashcatkin_make 이전에 버전(noetic)에 맞게 코드들을 수정 해줘야한다.
-
Configure the utility.h to use #include <opencv2/opencv.hpp> instead of #include <opencv/cv.h>
-
Configure CMakeLists.txt to use set(CMAKE_CXX_FLAGS "-std=c++14") instead of set(CMAKE_CXX_FLAGS "-std=c++11")
-
Move #include <opencv2/opencv.hpp> after the pcl headers
lio-sam 실행
roslaunch lio_sam run.launch
rosbag play your-bag.bag -r 3위 사이트에서 제공한 데이터를 넣고 실행 할 수 있다.
1. walking_dataset 사용
rosbag play walking_dataset.bag -r 3
2. Park_dataset 사용
rosbag play park_dataset.bag -r 3

공부하고 있어요!