SLAM에서 사용할 수 있는 센서의 종류
Proprioceptive sensor (자기 자신의)
IMU
선형가속도를 측정하는 Linear accelerator와 각속도를 측정하는 Angular gyroscope 센서가 혼한된 센서이다. Sping-damper system의 원리를 이용한 것이다.
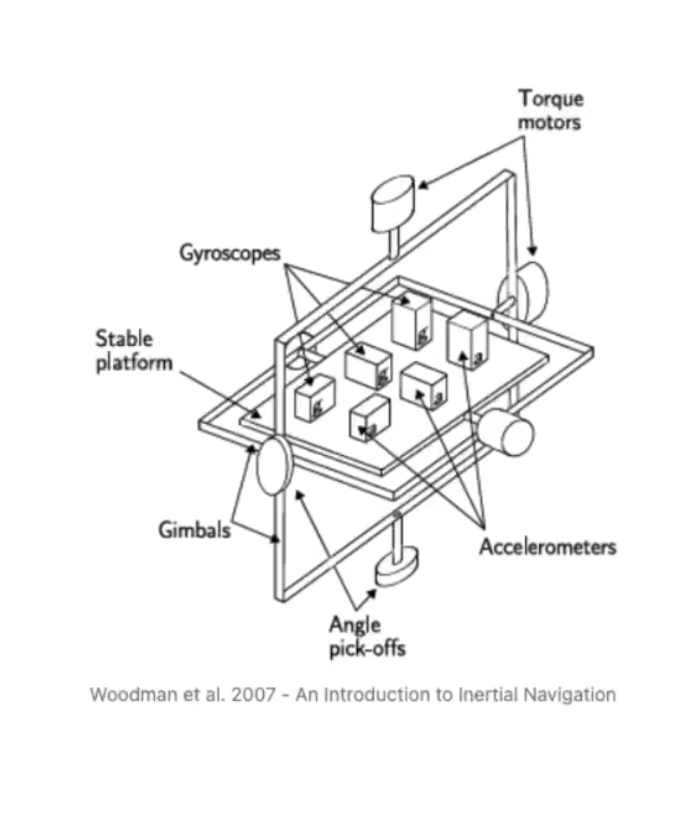
차동차의 경우 빛을 이용하는 Optical system IMU를 사용한다. 때문에 날씨나 온도 변화에도 안정적으로 데이터 수집이 가능하다.
- 장점
Consumer grade 제품은 저렴하다.
높은 sensitivity를 갖는다.
높은 FPS(100Hz-4000hZ)를 갖는다. - 단점
엄청나게 빠른 Drift 누적된다.
보정을 위해 Camera / LiDAR / GNSS와 함께 사용되어야 한다.
Wheel encoder
바퀴의 회전량(RPM)과 이동량(바퀴의 회전량 * 바퀴의 둘레)을 측정하는 센서로 Brush, Optical, Magnetic, Inductive, Capacitive 등의 다양한 종류가 존재한다.
- 장점
모든 자동차에 기본적으로 탑재되어 있다. - 단점
Odometry를 할 경우 Drift에 취약하다.
바퀴의 둘레가 주행 중 자주 바뀐다. (탑승자의 무게, 코너링, 타이어의 공기압 등)
Exteroceptive sensor (외부의)
GNSS(Global Navigation Satelite System)
삼각 측량 방법을 통해 localization을 수행한다.
- 장점
비용이 저렴하고 사용이 비교적 쉽다. - 단점
10~20m 정도의 오차를 갖는다.
지상에 설치된 중계기를 이용하는 RTK-GPS, DGPS를 사용하는 경우 오차는 cm단위 이지만 억대의 가격을 갖는다.
고층 빌딩 사이에서는 multi-path 문제를 갖는다.
실내에서 사용하기 어렵다.
LiDAR(Light detection and ranging sensor)
적외선 레이저를 쏘고 반사 시간을 측정하여 거리를 추정하는 센서이다. 주변 환경을 3D point cloud 형태로 바로 알 수 있다.
레이저 방식의 경우 ToF(Time of Flight), Phaes shift, Frequency modulation 등의 다양한 종류가 있다. 스캐닝 방식의 경우 센서가 회전하는 Mechanical scanner, 회전하지 않고 고정된 Solid state scanner, Flash LiDAR 등이 있다.
- 장점
Exteroceptive 센서 중 가장 저렴하다.
자율주행용 라이다는 ~100m 유효거리를 갖는다.
빛의 파장이 일어나지 않기 때문에 밝기 변화에 영향을 받지 않는다. - 단점
동일한 Device에 대해서 간섭 현상이 나타날 수 있다.
가격이 비싸다. 16채널의 경우 500~600만원, 128채널의 경우 수천만원 가량한다.
날씨에 영향을 받는다.
Multi-path 문제가 나타난다.
RADAR(Radio detection and ranging sensor)
반사되어 돌아오는 전파를 측정하여 radial 거리를 재는 센서이다. Doppler 효과를 이용해서 이동중인 물체의 속도 추정이 가능하다. 또한 전파의 종류를 바꿈으로서 near-range와 far-range 선택이 가능하다.
- 장점
날씨에 영향을 받지 않는다.
속도값을 바로 추정할 수 있다. - 단점
싼 센서의 경우 움직이지 않는 물체를 인지할 수 없다.
작은 물체는 인지할 수 없다.
LiDAR 보다 낮은 해상돌르 갖는다.
Multi-path 문제가 나타난다.
Ultrasound
초음파를 이용한 센서로 RADAR와 작동 방식은 유사하다.
- 장점
저렴하다.
Near-range에서 잘 작동한다. - 단점
물체의 형태를 잘 추정하지 못한다.
노이즈가 심하다.
Camera
광센서를 이용해서 빛 신호를 받고, debayering 프로세스를 통해 RGB를 재구성하는 센서이다.
- 장점
저렴하다.
Dense data, Texture, Color, High-FPS 등의 좋은 성능을 보여준다.
렌즈 교환을 통해 시야각을 수정할 수 있다.
사람이 보는 시야와 가장 유사한 정보를 수집한다. - 단점
깊이 정보가 소실된다.
빛에 영향을 많이 받는다.
Microphone
공기의 진동을 transducer 센서를 통해 전기 신호로 변환하는 센서이다. 여러개의 마이크를 통해 소리의 근원에 대한 위치를 계산할 수 있다.
- 장점
유일하게 소리를 이용한 센서이다.
가격이 저렴하다. - 단점
Geometry가 부정확하다.
잡음이 심하다.
SLAM의 종류
사용하는 센서의 종류에 따라 SLAM의 종류가 달라진다.
Visual-SLAM
카메라 센서를 이용한 SLAM이다.
- 장점
비교적 센서의 가격이 저렴하다.
렌즈, 초점, 노출 시간 등 센서의 성능을 조절하기 쉽다.
센서의 속도(30~60FPS)가 빠르다.
딥러닝 알고리즘 적용이 가능하다. - 단점
갑작스러운 빛 변화에 대응이 불가능하다.
시야가 가려지거나 어두운 곳에서 사용이 불가능하다.
Monocular Visual-SLAM
하나의 카메라를 이용하는 Monocular VSLAM의 경우 여러대의 카메라를 이용하는 SLAM 보다 비용(센서 가격, 전력 소비량, 데이터 송수신 대역폭 등)이 저렴하다. 하지만 3D 공간을 실제 스케일(up-to-scale로만 추정 가능)로 추정할 수 없는 단점이 있다. 때문에 Metric scale을 갖는 proprioceptive sensor가 필요하다. 최근에는 딥러닝을 이용한 monocular depth estimation에 관해 연구가 수행되고 있다.
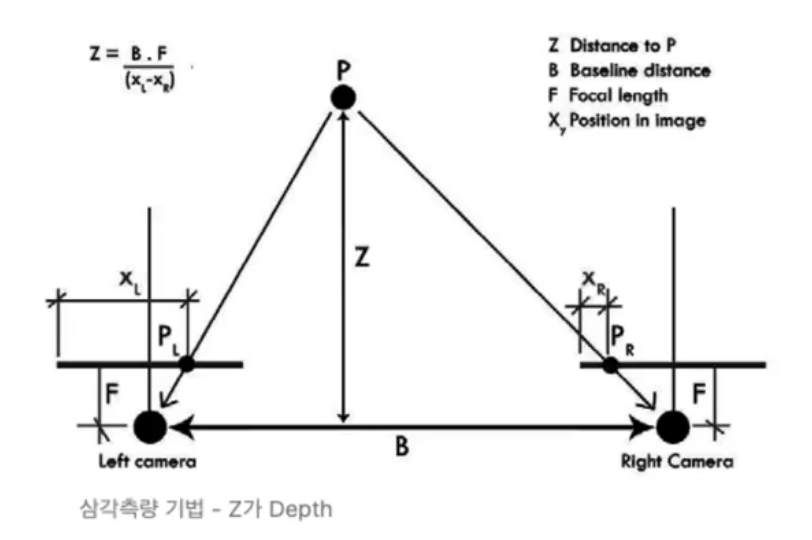
Stereo Visual-SLAM

두 개를 이용하는 Stereo, 다수의 카메라를 이용하는 Multi camera 방식이 있다. 다수의 카메라를 이용하는 경우 인접한 카메라들 간의 거리를 Metric scale로 알아야한다.
- 장점
두 이미지간의 disparity 정보를 이용해서 픽셀마다 depth를 추정할 수 있다.
metric scale의 3D 공간을 복원할 수 있다. - 단점
카메라 설정 및 보정이 어렵다.
모든 카메라는 동시에 데이터를 수집해야 한다(synchronized camera).
Baseline이 충분히 길어야 먼 거리의 3D 공간을 정확하게 측량할 수 있다.
카메라들마다 Intrinsic / Extrinsic calibration을 정확하게 해야한다. 이 과정은 불가능할 수도 있다.
모든 픽셀마다 disparty 정보를 계산하여 depth를 게산하기 때문에 많은 계산량이 요구되며, GPU나 FPGA가 요구되기도 한다.
RGB-D Visual-SLAM

깊이 정보를 포함하는 RGB-D Camera를 이용한 SLAM 방법이다.구조광(Structured light) 또는 Time-of-Flight(ToF) 센서를 이용한 카메라를 사용한다. 센서가 Depth 정보를 직접 수집하기 때문에 깊이 정보를 얻기위한 계산이 필요하지 않다. Dense mapping에 주로 사용된다.
- 장점
Depth 데이터를 통해 3D 공간을 Metric scale로 실시간 복원이 가능하다. - 단점
~10m 정도에서만 depth 데이터가 정확하다.
Field of view가 작다.
적외선을 이용하기 때문에 실외에서는 사용하기 어렵다.
