영상처리
1.Camera model과 Intrinsic 그리고 distortion
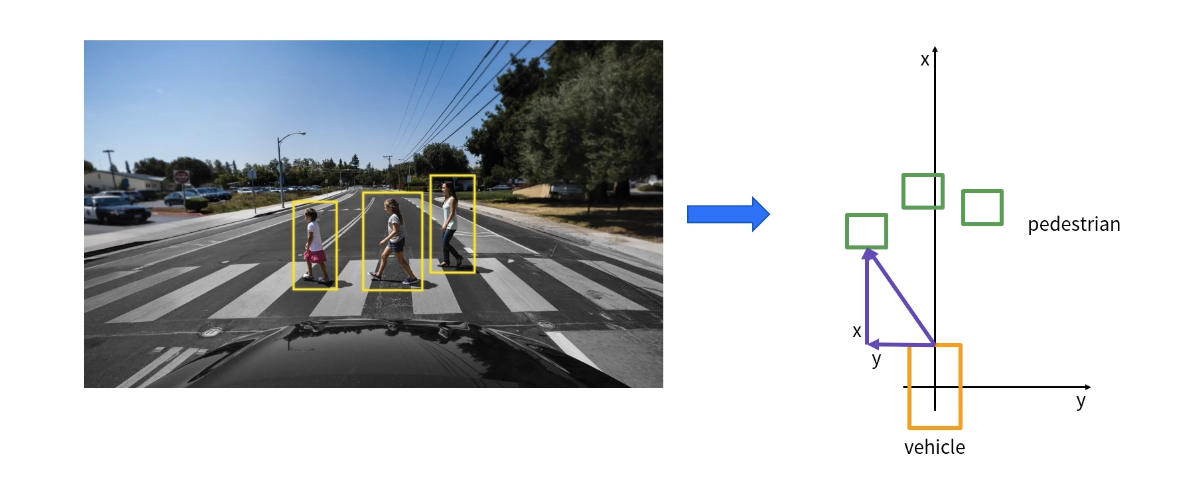
perception은 주행 환경을 인지하는 과정으로 유의미한 정보를 생성하는 단계가 필요하다. 영상 데이터의 경우 이미지 영역에서 객체를 인식하는 것이 아닌 객체와 차량의 관계를 파악하는 것이 중요하다.위와 같이 영상에 존재하는 객체의 위치를 카메라로부터 어디에 위치하
2023년 6월 10일
2.Extrinsic calibration
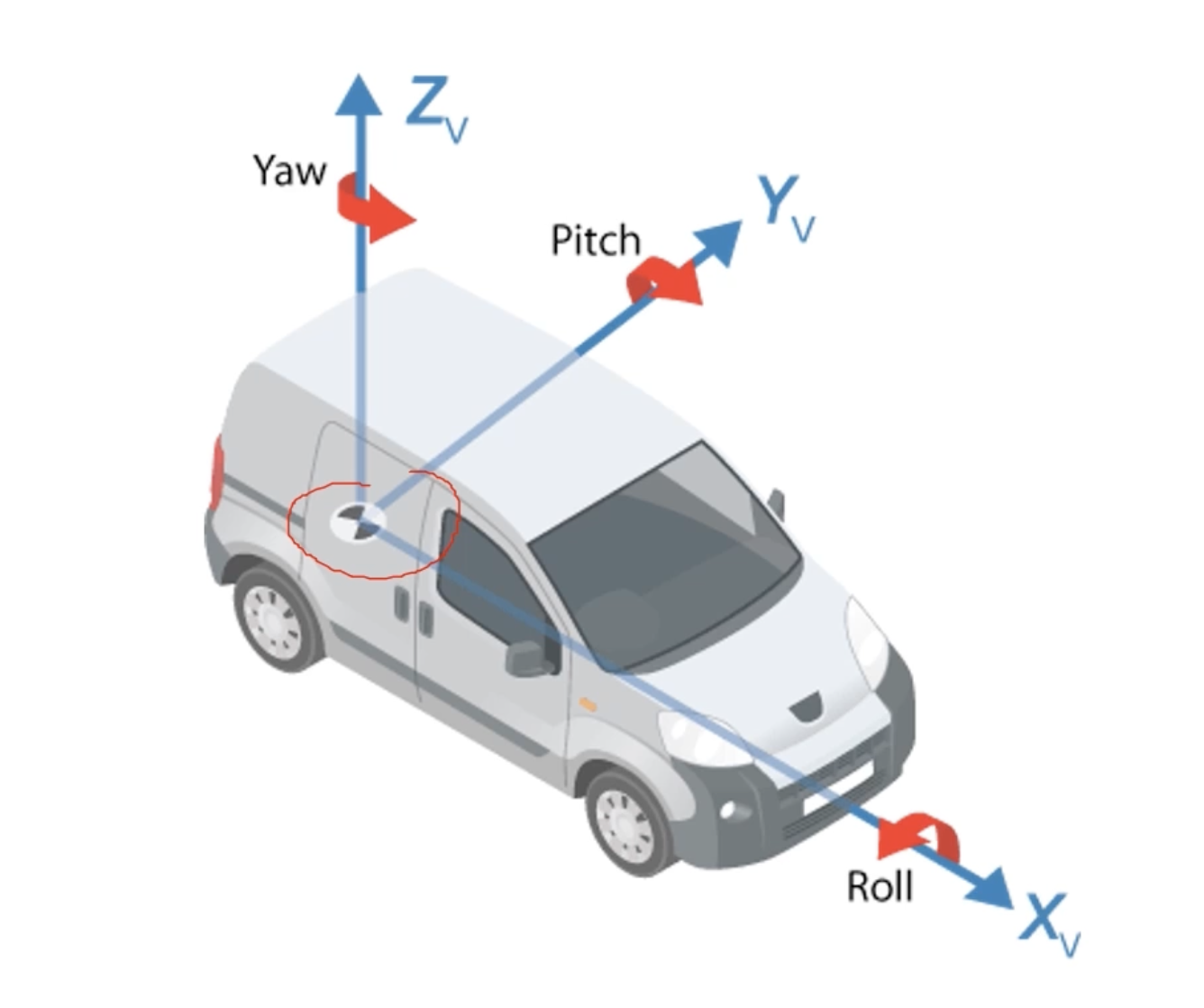
Extrinsic calibration은 world coordinate와 Camera coordinate 혹은 그 반대의 경우를 수행하는 과정을 이해하는 방법이다. Computer vision을 활용한 자율주행 분야에서 Extrinsic calibration은 1\.
2023년 6월 17일