Dec. 16, 2024 (Mon) - SlicerROS2: A Research and Development Module for Image-Guided Robotic Interventions
Study
SlicerROS2: A Research and Development Module for Image-Guided Robotic Interventions
-
인사이트: MRI or CT 3D recon 이미지 + Touch X 기기를 활용하여 Surgical Robotics Navigation 연구를 진행할 수 있을 것 같습니다.
-
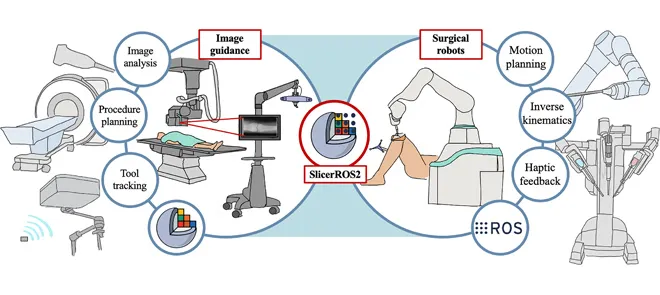
Summary: SlicerROS2 is an integrated software combining 3D Slicer and ROS. It initially used the ROS and C++ API from 3D Slicer in its first release. Now, the rewritten and redesigned module enables access to 3D Slicer’s Python API. This open-source library supports image-guided robotic interventions that involve the use of medical imaging in tandem with robotics.
-
library:
🚀 Four Applications of SlicerROS2 (with touch-based feedback)
1. Surgical Navigation: Touch X → prevent the robot from breaching specific anatomical boundaries.
2. Image-Guided Motion Planning: VRK (da Vinci Research Kit) → plan and simulate surgical paths.
3. Robot and Image Simulation: Gazebo simulator for robotic ultrasound simulation → Realistic tissue interaction
4. Custom Device Integration: MRI-guided robotic devices → accurate placement and interaction with MRI images during interventions.