Study
1.Nov. 29, 2024 (Fri) - Robotic Devices for Assisted and Autonomous Intravenous Access

Robotic Devices for Assisted and Autonomous Intravenous Access
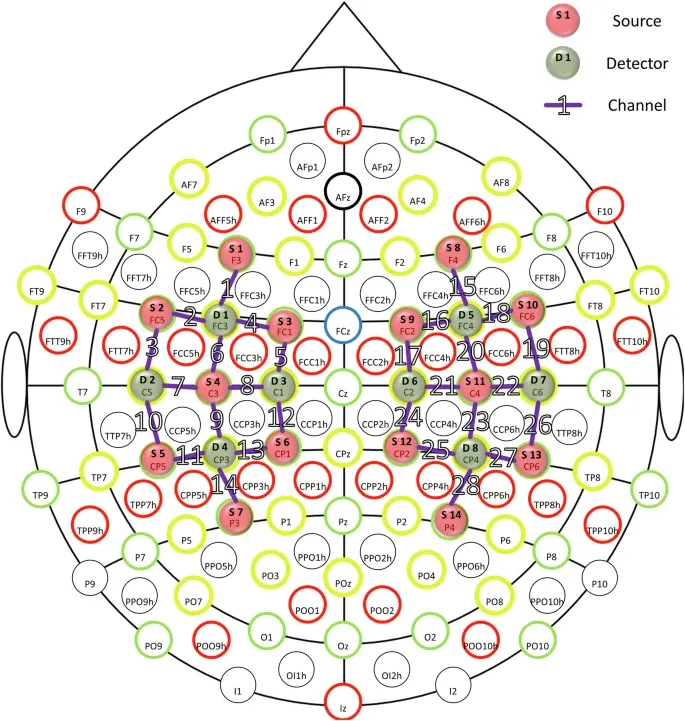
2.Dec. 1, 2024 (Sun) - fNIRS (Scientific Reports) Comparing structure-function relationships in brain networks using EEG and fNIRS
Comparing structure-function relationships in brain networks using EEG and fNIRS
3.Dec. 2, 2024 (Mon) - Robotic Sonographer: Learning Robotic Ultrasound With Sparse Expert’s Feedback
Robotic Sonographer: Learning Robotic Ultrasound With Sparse Expert’s Feedback
4.Dec. 3, 2024 (Tue) - Exploring the dynamics of prefrontal cortex in the interaction between orienteering experience and cognitive performance by fNIRS
Exploring the dynamics of prefrontal cortex in the interaction between orienteering experience and cognitive performance by fNIRS
5.Dec. 4, 2024 (Wed) - EEG2Video: Towards Decoding Dynamic Visual Perception from EEG Signals
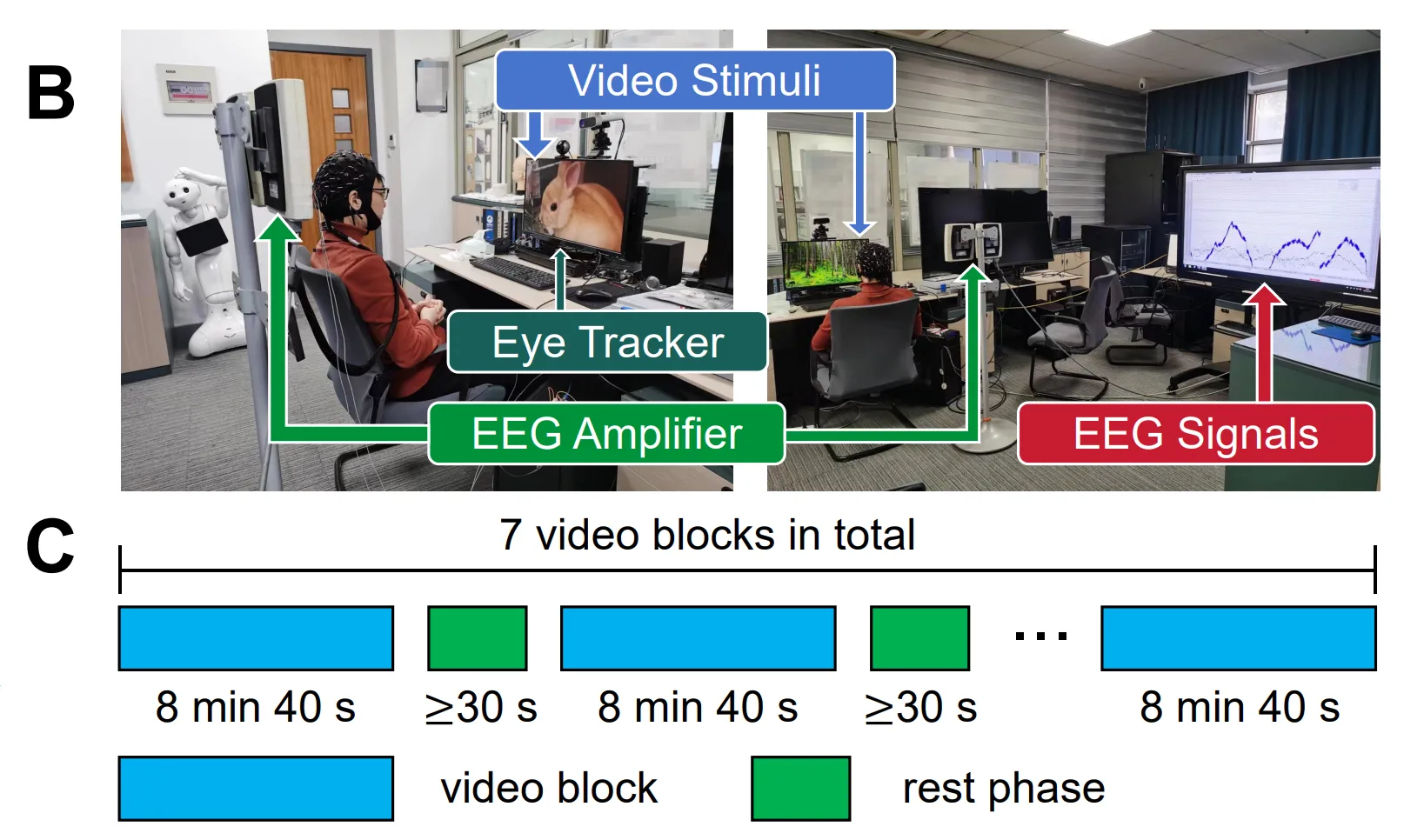
EEG2Video: Towards Decoding Dynamic Visual Perception from EEG Signals
6.Dec. 5, 2024 (Thu): Neuro-3D: Towards 3D Visual Decoding from EEG Sginals
Neuro-3D: Towards 3D Visual Decoding from EEG Sginals
7.Dec. 7, 2024 (Sat) - A Biomodal Deep Learning Architecture for EEG-fNIRS Decoding of Overt and Imagined Speech
A Biomodal Deep Learning Architecture for EEG-fNIRS Decoding of Overt and Imagined
8.Dec. 15, 2024 (Sun) - ARViS: a bleed-free multi-site automated injection robot for accurate, fast, and dense delivery of virus to mouse and marmoset cerebral cortex
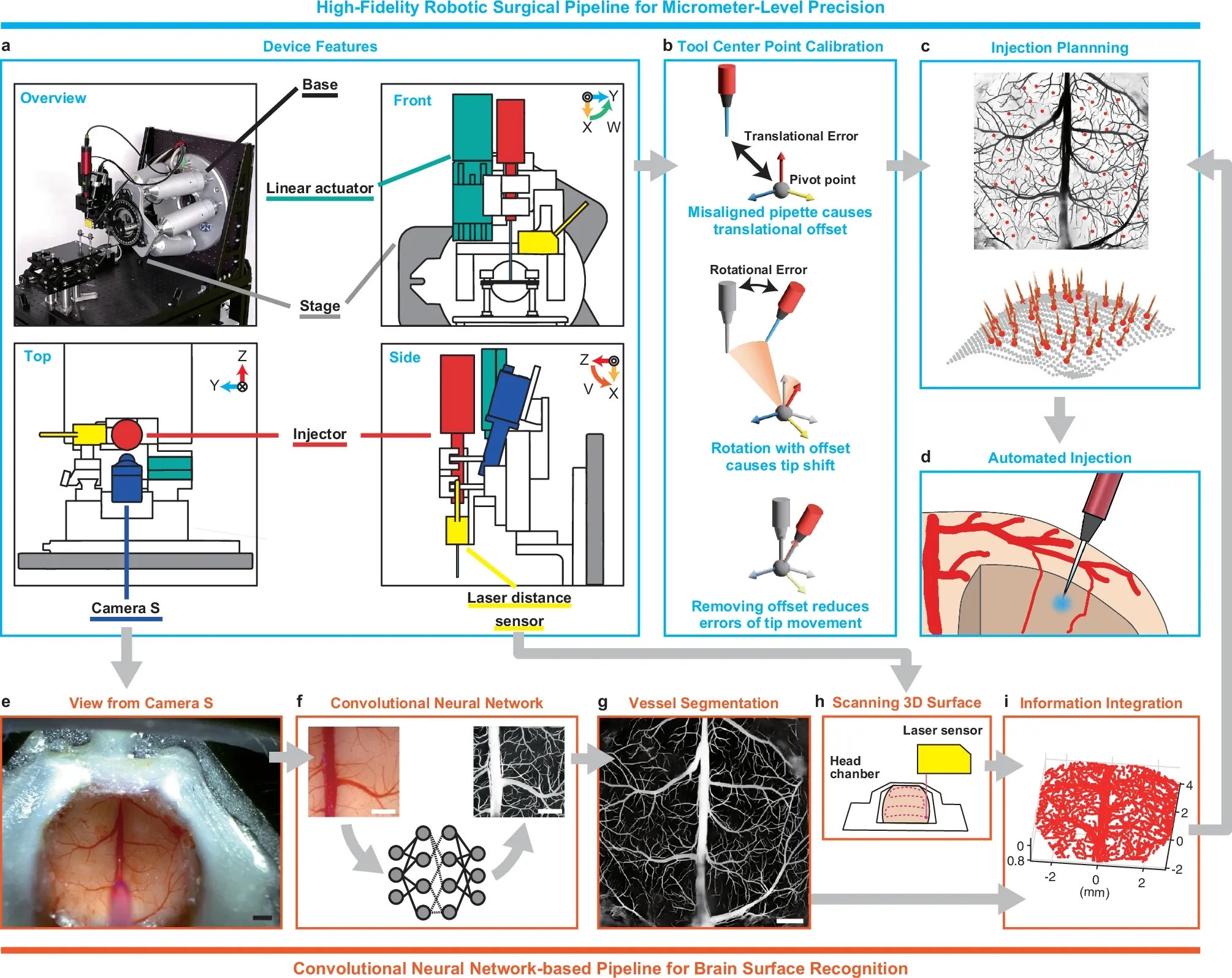
ARViS: a bleed-free multi-site automated injection robot for accurate, fast, and dense delivery of virus to mouse and marmoset cerebral cortex
9.Dec. 16, 2024 (Mon) - SlicerROS2: A Research and Development Module for Image-Guided Robotic Interventions
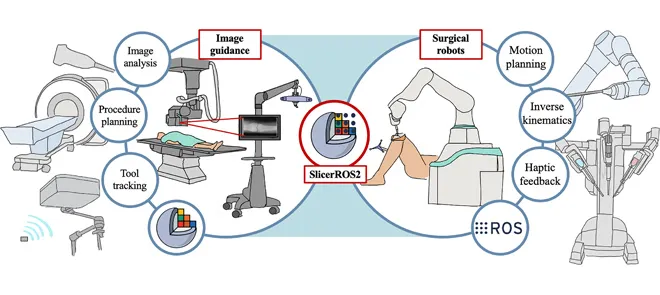
SlicerROS2: A Research and Development Module for Image-Guided Robotic Interventions
10.Dec. 18, 2024 (Wed) - Neuro-GPT: Towards A Foundation Model For EEG
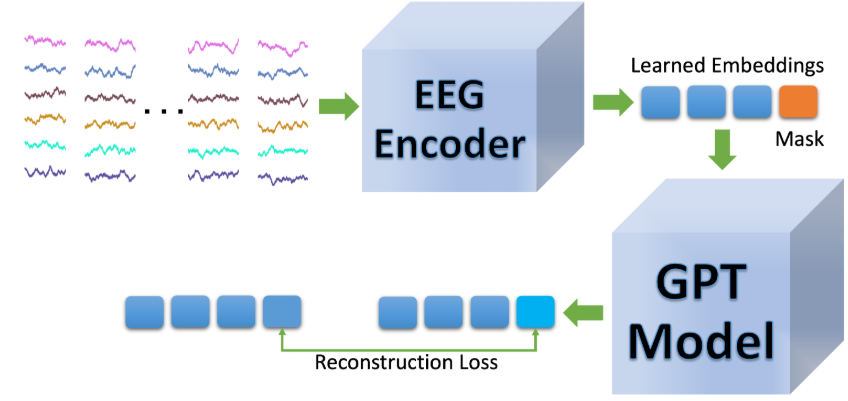
Neuro-GPT is a foundation model to handle the scarcity and heterogeneity of EEG data for BCI tasks, consisting of an EEG encoder and a GPT model.
11.Dec. 20, 2024 (Fri) - Enhanced control of a brain–computer interface by tetraplegic participants via neural-network-mediated feature extraction
Enhanced control of a brain–computer interface by tetraplegic participants via neural-network-mediated feature extraction
12.Dec. 21, 2024 (Sat) - A multiple session dataset of NIRS recordings from stroke patients controlling brain–computer interface
A multiple session dataset of NIRS recordings from stroke patients controlling brain–computer interface
13.Dec. 23, 2024 (Tue) - Design and Evaluation of Augmented Reality-Enhanced Robotics System for Epidural Interventions
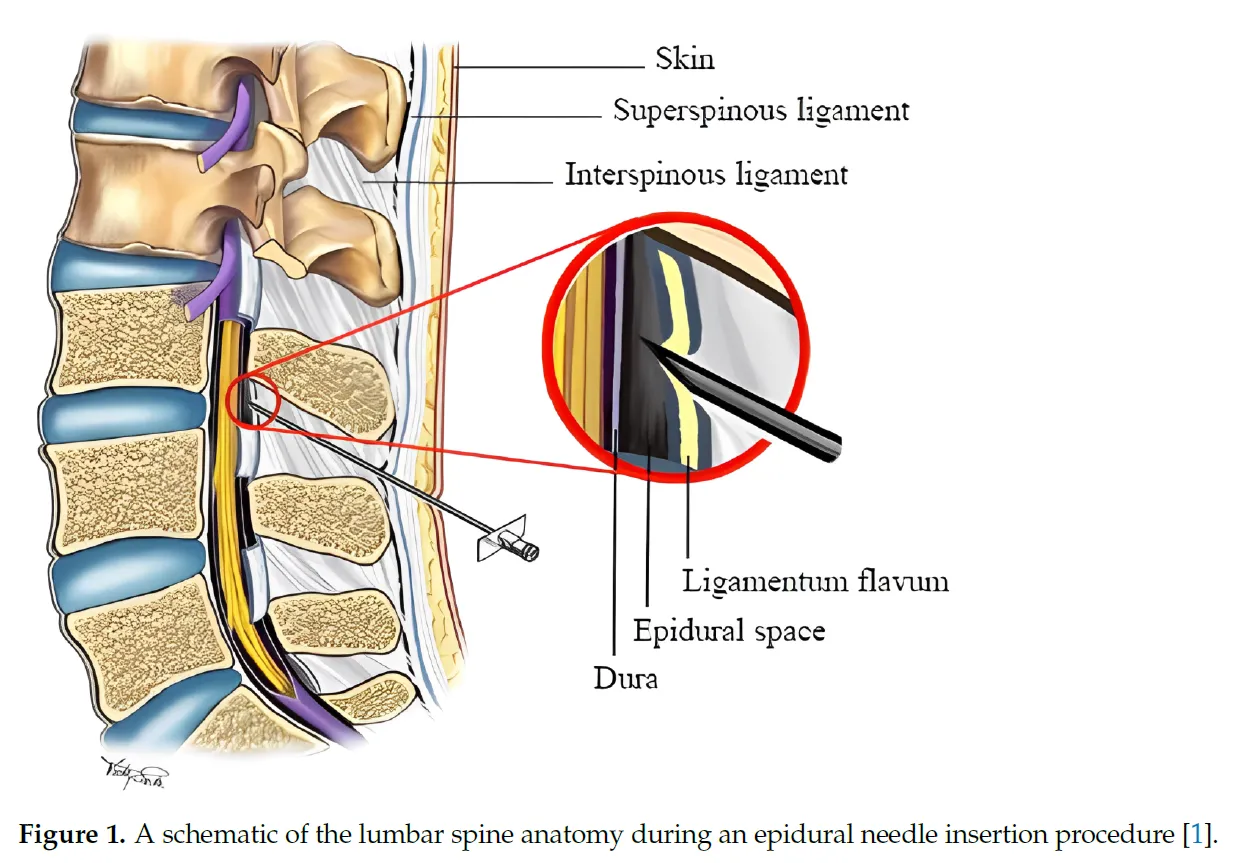
Design and Evaluation of Augmented Reality-Enhanced Robotic System for Epidural Interventions
14.Dec. 24, 2024 (Tue) - Bridging spinal cord injuries wirelessly
Bridging spinal cord injuries wirelessly
15.Jan. 3, 2025 (Fri) - Transcranial focused ultrasound-mediated neurochemical and functional connectivity changes in deep cortical regions in humans
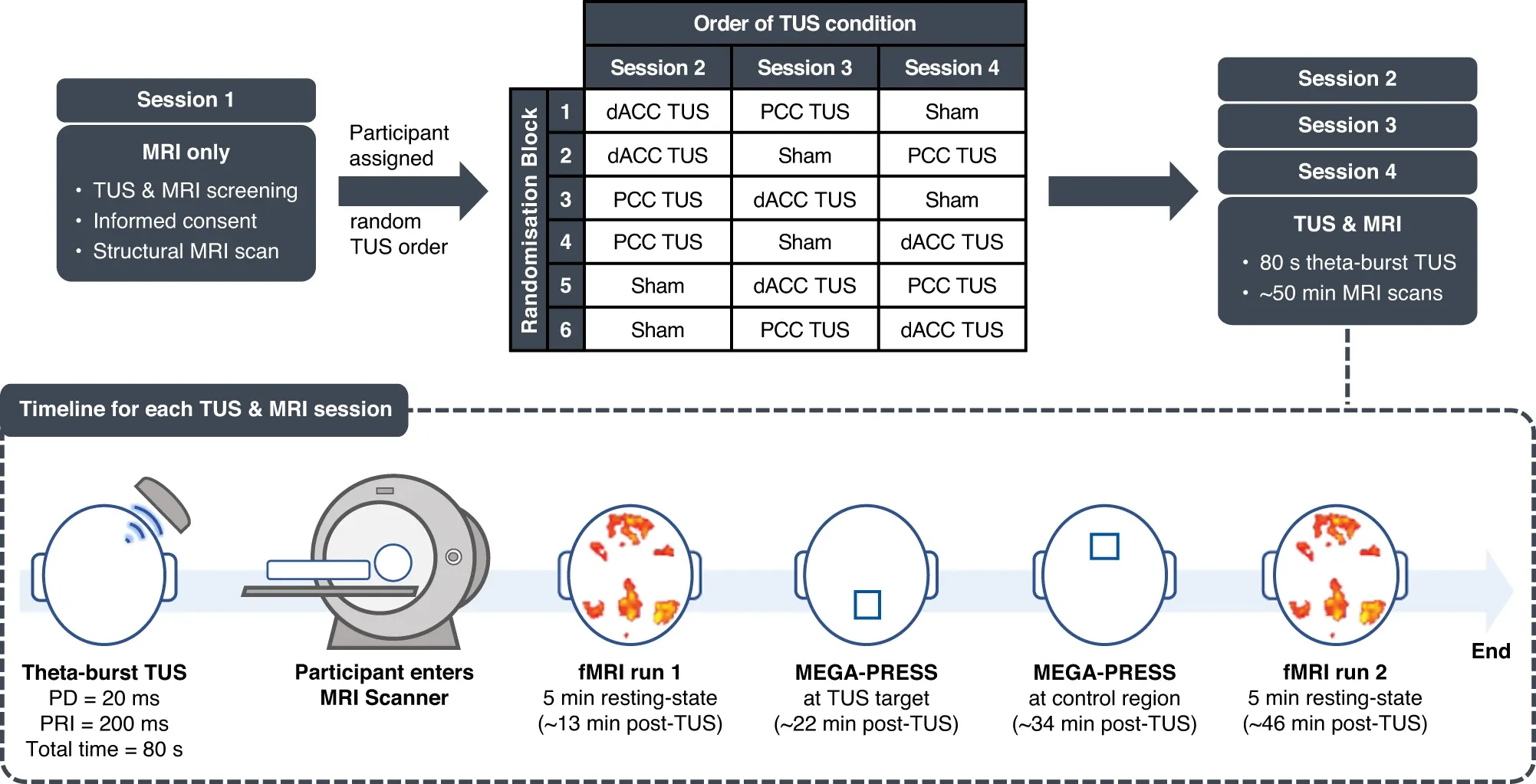
Transcranial focused ultrasound-mediated neurochemical and functional connectivity changes in deep cortical regions in humans
16.Jan. 5, 2025 (Sun) - An fMRI study on the generalization of motor learning after brain actuated supernumerary robot training
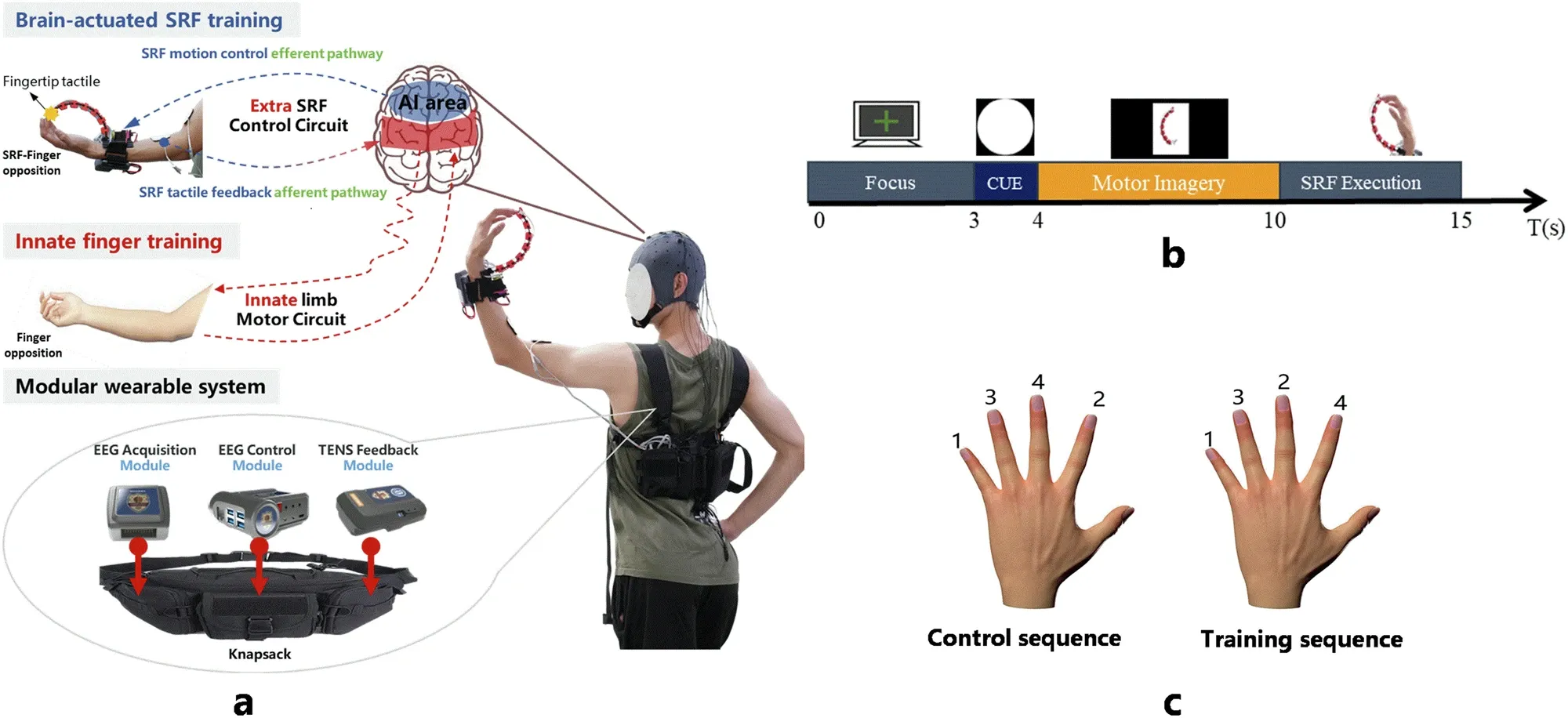
An fMRI study on the generalization of motor learning after brain-actuated supernumerary robot training
17.[생체계측공학] Lecture 1, 세포 항상성 및 생리학 개론
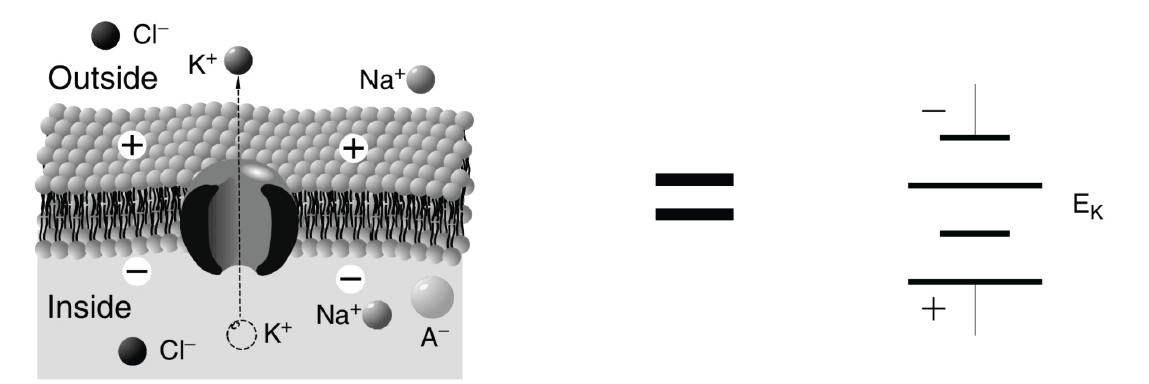
Lecture #1. Cellular Homeostasis and Biophysical Concepts
18.[생체계측공학] Lecture 2, Cellular Communication
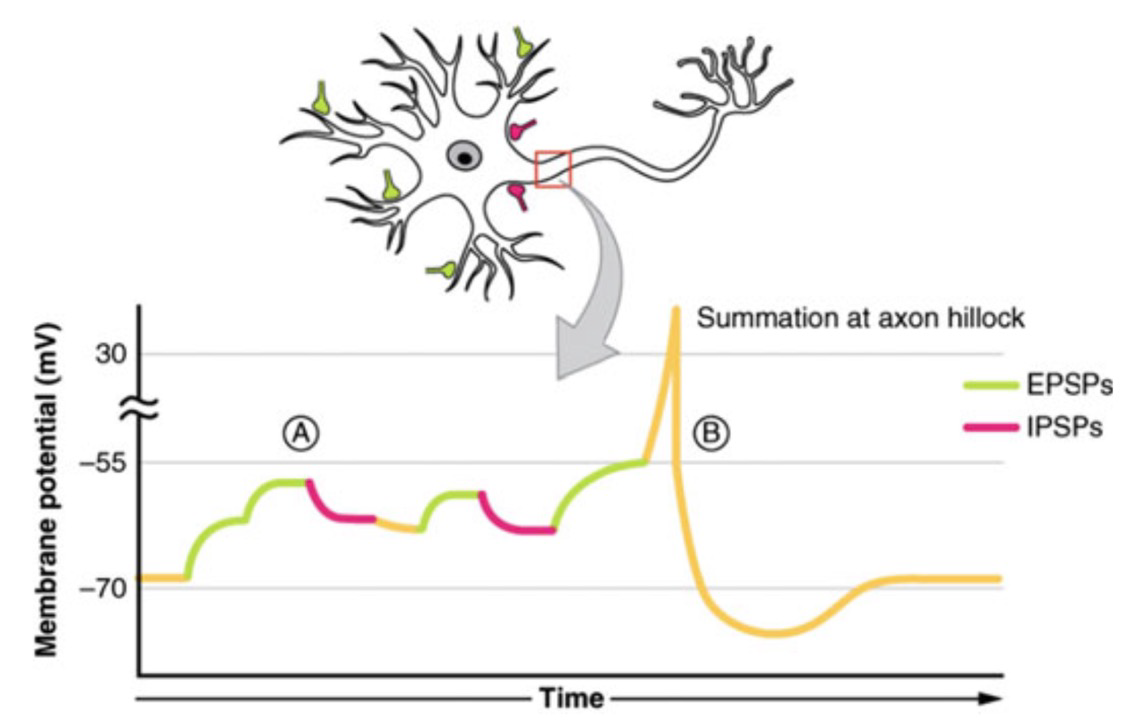
Lecture 2, Cellular Communication: AP Propagation & Nervous System
19.Vision Language Models (VLM)의 수학적 기초
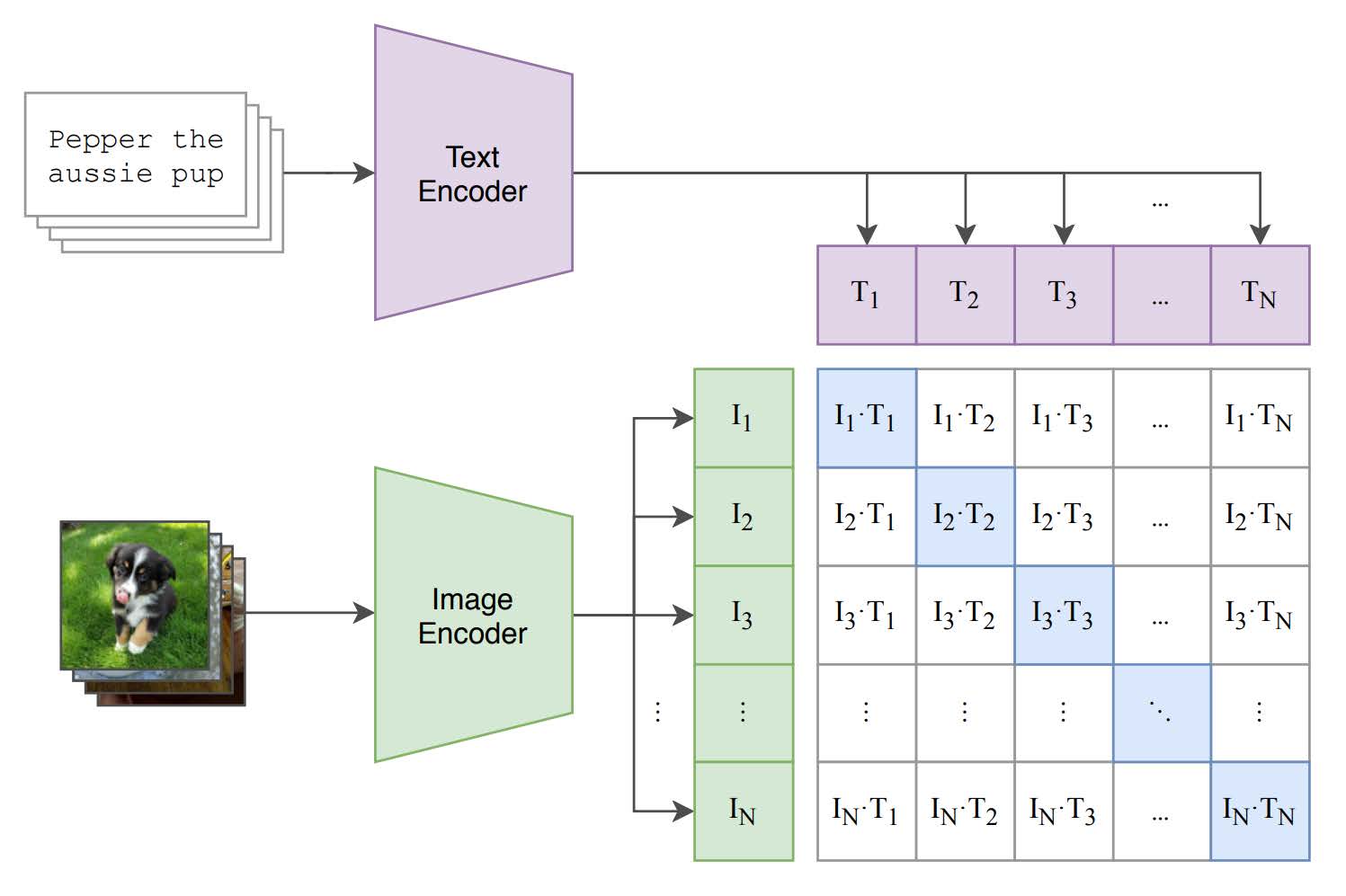
Vision-Language Models (VLM)의 기초: CLIP 모델의 수학적 기반
20. Reinforcement Learning - #1. Markov Decision Process (MDP, 마르코프 결정 과정), Bellman Optimality Equation (벨만 최적 방정식)
Reinforcement Learning - #1. Markov Decision Process (MDP, 마르코프 결정 과정), Bellman Optimality Equation (벨만 최적 방정식)
21.[생체계측공학] Lecture 3, Electrochemical Principles & Electrode Reactions
Lecture 3. Electrochemical Principles and Electrode Reactions