9일차: 강화학습
9일차 요약
- 오전: 강화학습 이론 및 back-propagation 실습
- 오후: 강화학습 실습
- MDP Grid World 실습
Backpropagation 실습
import math
import torch
from torch.autograd import Variable
x = Variable(
torch.tensor(1., dtype=torch.float32),
requires_grad=True)
y = Variable(
torch.tensor(1., dtype=torch.float32),
requires_grad=True)
optimizer = torch.optim.Adam(params=[x,y], lr=0.01)
EPOCHS = 100
for epoch in range(EPOCHS):
f = 2*(x**2) + (y**2) + (math.exp(4*x*y))
optimizer.zero_grad()
f.backward()
optimizer.step()
print(x, y)
print(f)
MDP 실습: GIRD WORLD
- Grid world가 다음과 같이 주어졌을 때 정답 길 찾기!
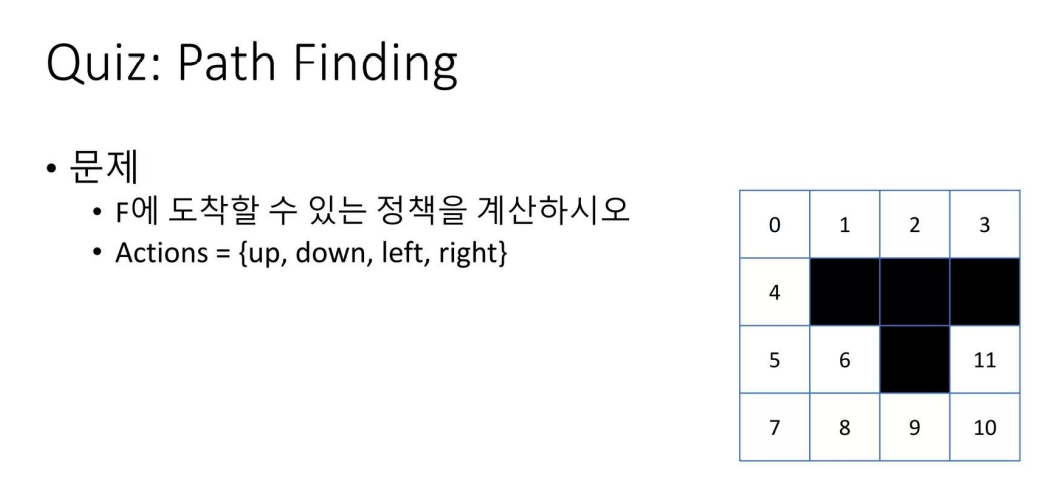
- 직접 state transition matrix, reward matrix 만들어 봄
matrix p 생성
- 행은 현재 내 상태, 열은 이동 가능한 확률을 의미함
- #up은 행 i번에서 위로 올라갈 수 있는지
- 위에가 막혀있을 경우 자기 자신 스스로이기 때문에 자기 자신한테 1이라고 표현- 따라서 4번 인덱스로 위로 올라갈 경우 1번 인덱스에 도달하기 때문에 4,1에 1이라고 작성
- #down, #right, #left도 동일
import numpy as np
P = np.array([
# up
# 0 1 2 3 4 5 6 7 8 9 10 11
[ [1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0],
[1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1]],
# down
[ [0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1]],
# left
[ [1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1]],
# right
[ [0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0],
[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1]]], dtype='float32')
P.shape
P = P.transpose(1, 0, 2)Reward matrix
- 위로 갈 때 finish index에 도달할 경우 1, 도달하지 못할 경우 0, 자기 자신일 경우 1
- 따라서 해당 문제에서는 10번 인덱스에서 위로 올라가야지만 finish index에 도달할 수 있기 때문에 첫번째 행에서 10번 열만 1이 됨
R = np.array([
[-1, -1, -1, -1, -1, -1, -1, -1, -1, -1, 1, 0], # up
[-1, -1, -1, -1, 1, 1, 1, -1, -1, -1, -1, 0], # down
[-1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, 0], # left
[-1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, 0]], #right
dtype='float32')
R = R.transpose()MDP
pi = np.ones((12, 4), dtype='float32') * 0.25
def policy_eval(P, R, pi, maxiter=30):
V = np.zeros((maxiter, 12), dtype='float32')
for i in range(maxiter-1):
V[i+1] = np.squeeze(
np.matmul(
np.expand_dims( pi, 1 ),
np.expand_dims( R + 0.6 * np.dot(P, V[i]), 2 )))
return V[maxiter-1]
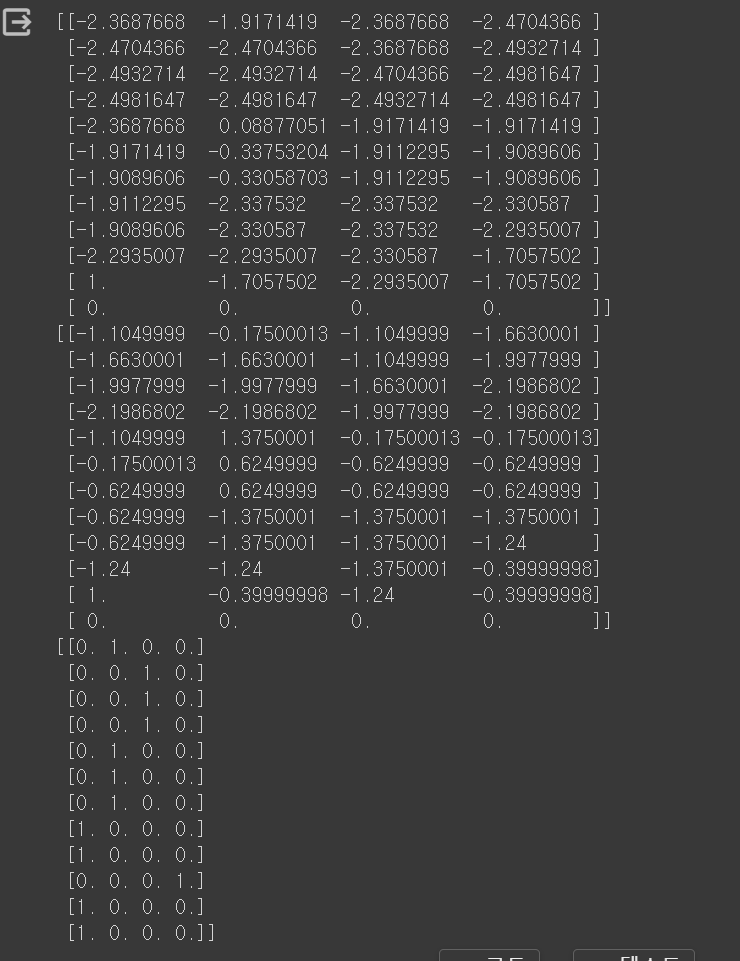
def policy_upd(P, R, v):
print(np.squeeze(np.expand_dims( R + 0.6 * np.dot(P, v), 2 )))
a_idx = np.argmax(np.squeeze(np.expand_dims( R + 0.6 * np.dot(P, v), 2 )), axis=1)
pi = np.zeros((12, 4), dtype='float32')
pi[range(12), a_idx] = 1.
return pi
pi_old = None
pi = np.ones((12, 4), dtype='float32') * 0.25
while not np.all(np.equal(pi_old, pi)):
pi_old = pi.copy()
v = policy_eval(P, R, pi)
pi = policy_upd(P, R, v)
print(pi)
결과값