오늘은 px4 설치하고 가제보 환경에서 제어하는 것을 포스팅 하려고 합니다.
이후에는 ROS를 사용해서 드론을 제어하고 라이다와 IMU를 플러그인해서 센서 데이터까지 받아오는 것을 포스트하겠습니다.
📌px4 설치
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
cd /ros2_ws/src/PX4-Autopilot📌빌드 및 가제보 실행
cd /ros2_ws/src/PX4-Autopilot
make px4_sitl gazebo-classic
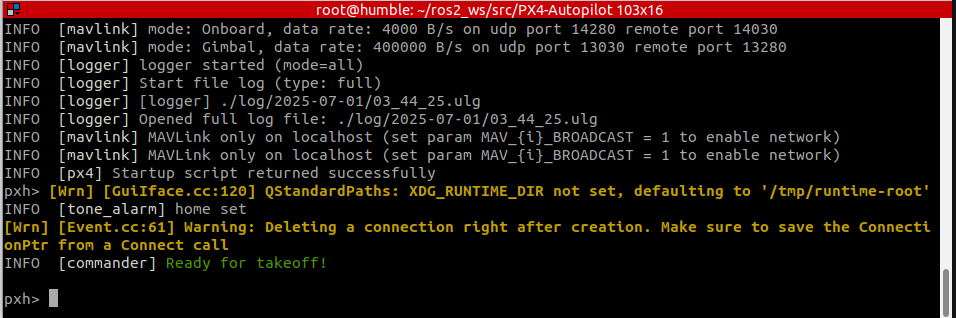
make px4_sitl gazebo-classic_iris__warehouse (가제보 환경 있는 버전)다음과 같이 시뮬레이션 환경이 열리면 'Ready for takeoff'가 뜨는데, 이게 뜨면 pxh> 에다가 원하는 명령어를 입력하면 됩니다.
📌제어
commander takeoff
commander land📌GCS 설치
처음에는 GCS가 있어야 Takeoff가 가능했는데 지금은 없어도 가능하네요 ..? 아무튼 네
아래 링크에서 다운 받으면 됩니당
Qgroundcontrol
도커를 사용하는 경우에는 root에서 실행을 못하고, user에서 실행할 수 있습니다.
그렇기 때문에 일반 사용자 권한 허용을 해준후 user모드로 들어가서 해야됩니다.
//권한 허용
usermod -a -G dialout $user
//user mode
su - $user📌결과
아래 사진과 같이 commander takeoff를 했을 때 드론이 이륙하는것을 볼 수 있습니다.

빨리 다음편 주세요~