오늘은 저번에 이어서 가제보 환경에 라이다와 IMU 센서를 플러그인 해서 ROS 데이터를 받아오는 것을 포스팅하겠습니다 !
1. LiDAR Plugin
제가 여기서 사용한 라이다 모델은 Velodyne이고, Gazebo-classic 환경입니다.
1.1 git clone
먼저 velodyne 모델이 있는 git repository를 clone 한 후 아래의 경로에 붙여넣어 줍니다.
- 경로
PX4-Autopilot/Tools/simulation/gazebo-classic/models- git clone
git clone https://github.com/osrf/gazebo_models.git1.2 model joint 연결
이후 아래 경로의 model.sdf 에서 다음과 같이 라이다를 include 해주고 joint를 넣어줘서 기존의 드론 모델과 결합을 시켜줍니다.
- 경로
PX4-Autopilot/Tools/simulation/gazebo-classic/models/iris/model.sdf - 코드
<include name="velodyne">
<uri>model://velodyne_hdl32</uri>
<pose>0 0 -0.1 0 0 0</pose> <!-- 드론 중심 기준 위치 -->
</include>
<joint name="velodyne_joint" type="fixed">
<parent>base_link</parent> <!-- 드론의 메인 링크 -->
<child>velodyne::base</child> <!-- velodyne 모델의 링크 이름 -->
</joint>1.3 sensor 플러그인
아래 센서를 사용하기 위해서는 일단 아래와 같은 패키지를 설치해야 합니다.
sudo apt install ros-humble-gazebo-ros-pkgs ros-humble-gazebo-ros2-control
sudo apt install ros-humble-velodyne-description ros-humble-velodyne-gazebo-plugins ros-humble-velodyne-simulator이후 velodyne 모델 sdf 파일에서 센서 블록안에 다음과 같이 추가를 해줍니다. 아래를 추가해줘야 시뮬레이션을 실행했을 때 ROS 메시지가 나옵니다 !
여기서의 토픽이름은 "/velodyne_points" 입니다.
<plugin name="gazebo_ros_laser_controller" filename="libgazebo_ros_velodyne_laser.so">
<ros>
<namespace>/velodyne</namespace>
<remapping>~/out:=velodyne_points</remapping>
</ros>
<frame_name>top</frame_name>
<organize_cloud>false</organize_cloud>
<min_range>0.9</min_range>
<max_range>130.0</max_range>
<gaussian_noise>0.008</gaussian_noise>
</plugin>
1.4 라이다 스캔 조정
1.3 까지 하고 라이다를 스캔을 시각화했을 때 포인트 수가 적고 시야각이 좁아서 다음과 같이 샘플 수와 시야각을 늘려 주었습니다. 다음은 라이다의 모델 sdf 파일에서 ray 블록안에 추가해주면 됩니다.
<scan>
<horizontal>
<samples>1024</samples>
<resolution>1</resolution>
<min_angle>-3.1415</min_angle>
<max_angle>3.1415</max_angle>
</horizontal>
<vertical>
<samples>128</samples>
<resolution>1</resolution>
<min_angle>-3.1415</min_angle>
<max_angle>3.1415</max_angle>
</vertical>
</scan>2. IMU Plugin
다음은 IMU Plugin 입니다. 라이다에서는 include 했지만 imu는 바로 모델 sdf 파일에 센서 플러그인을 하였습니다. 크게 다음과 같이 추가했습니다.
- mass
- pose
- plugin
- joint
mass 같은 경우에는 추가하지 않으면 드론이 제대로 날지 않았어서 추가해줬습니다. 그리고 질량이 너무 크면 드론이 천천히 날고, waypoint를 주었을 때 급하강했다가 상승하는 현상이 보이기 때문에 적당한 값을 넣어줘야 합니다.
<link name="imu_link">
<pose>0.05 0 -0.1 0 0 0</pose>
<inertial>
<mass>0.001</mass>
<inertia>
<ixx>1e-6</ixx>
<iyy>1e-6</iyy>
<izz>1e-6</izz>
<ixy>0</ixy>
<ixz>0</ixz>
<iyz>0</iyz>
</inertia>
</inertial>
<sensor name="imu_sensor" type="imu">
<pose>0 0 0 0 0 0</pose> <!-- IMU 위치 설정 -->
<always_on>true</always_on>
<update_rate>100.0</update_rate>
<visualize>true</visualize>
<plugin name="imu_plugin" filename="libgazebo_ros_imu_sensor.so">
<ros>
<namespace>/imu</namespace>
<remapping>~/out:=data</remapping>
</ros>
<topicName>imu/data</topicName>
<frameName>imu_link</frameName>
</plugin>
</sensor>
</link>
<joint name="imu_joint" type="fixed">
<parent>base_link</parent>
<child>imu_link</child>
</joint>3. 결과
센서 실행은 저번에 포스팅한 드론 실행하는 command를 사용하면 센서가 활성화가 됩니다 !
-
topic list
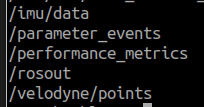
-
라이다 topic echo
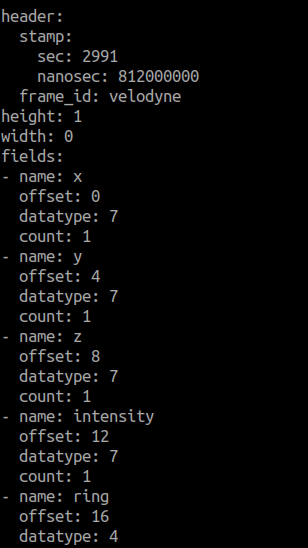
-
imu topic echo
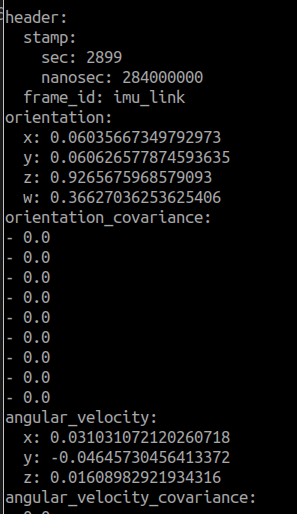
-
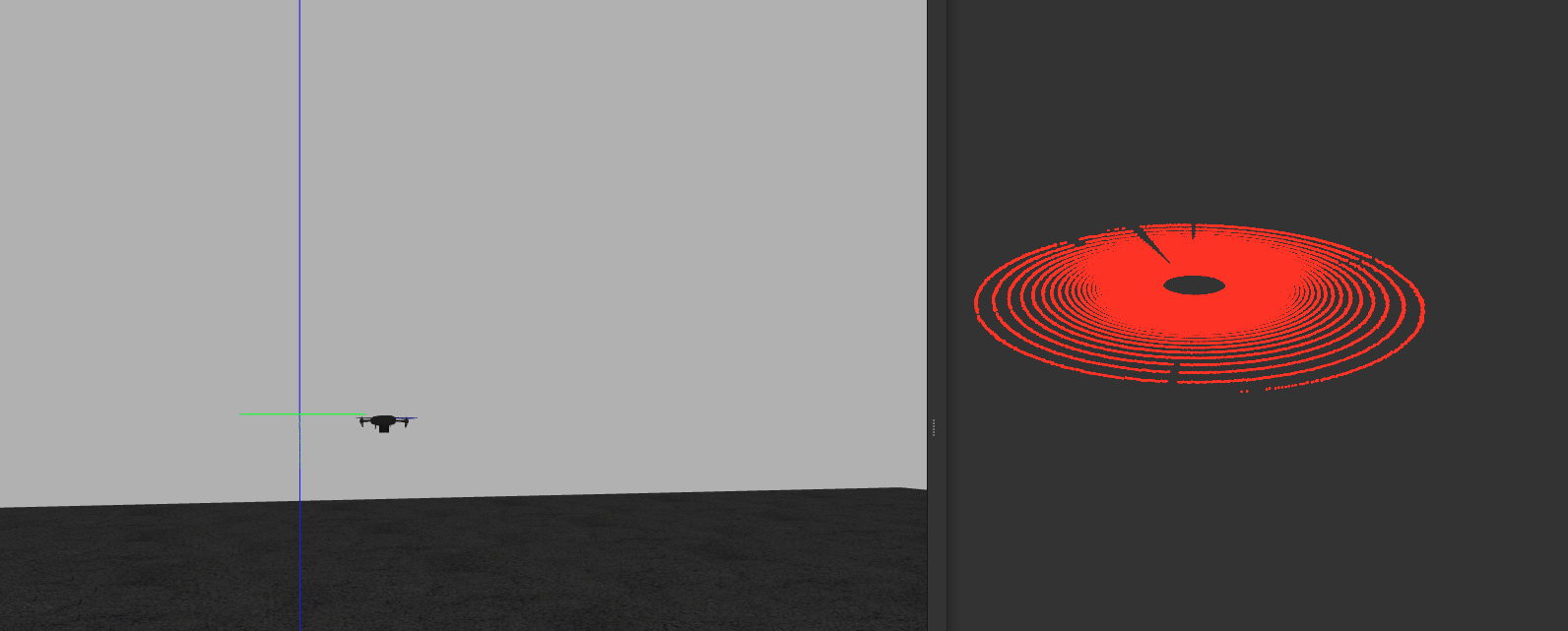
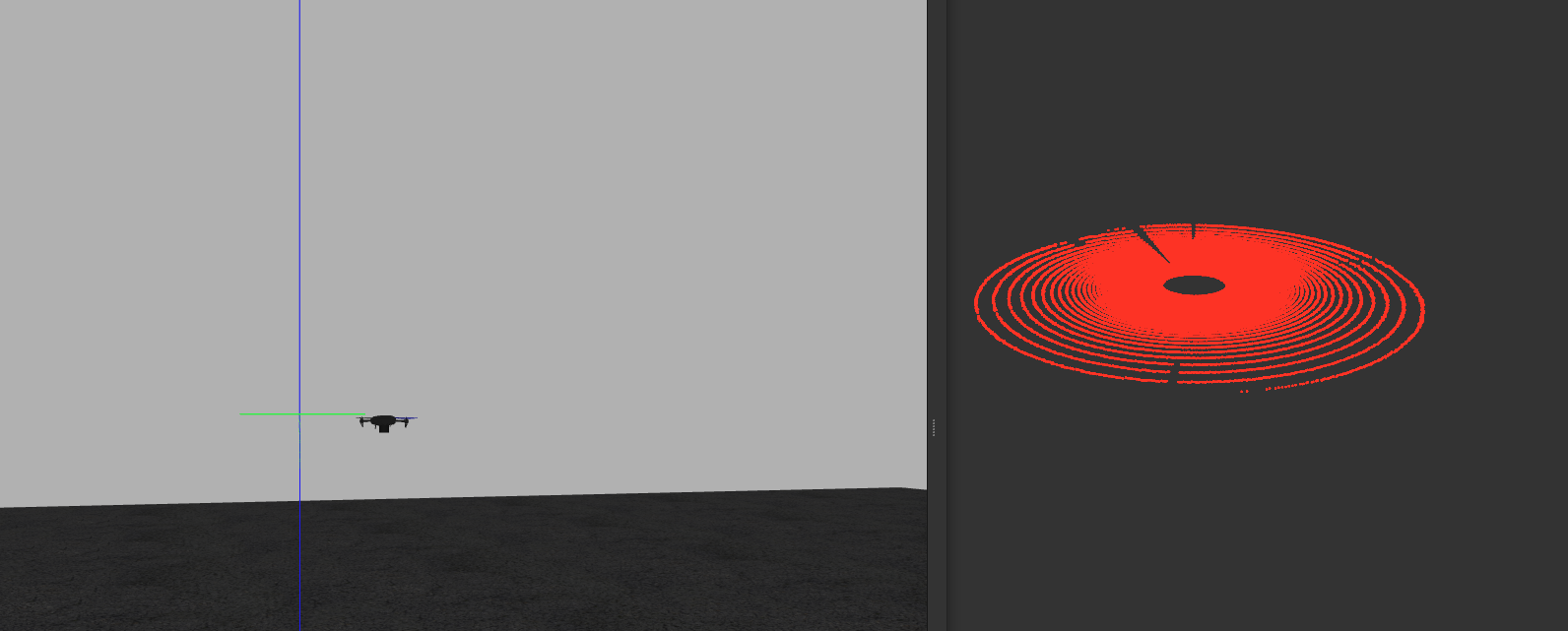
Scan 시각화
감사합니다 .
