산업공학특론 논문 패널 리뷰
- 본 내용은 A Machine Learning Classifier for Detection of Performance Issues in Industrial Closed-Loop PID Controllers 논문을 읽고 정리한 내용입니다.
- 논문 원본은 해당 링크에서 다운받으실 수 있습니다.
Introduction
- 공정 산업에서 자동화 시스템의 사용이 증가함에 따라 제어기 성능 평가의 중요성도 커지고 있음
- 다양한 제어 시스템 중에서도, PID controller가 여전히 널리 사용되고 있음
- 많은 산업체에서 제어 시스템 유지를 위해 제어 엔지니어를 고용하지만, 한 엔지니어가 평균 약 450개의 제어 루프를 담당함
- 각 제어 루프를 수동으로 검사하는 데 1~2시간이 소요되므로, 전체 책임 영역을 검사하는 데 최소 450시간이 필요함
- 이러한 노력에도 불구하고 제어 시스템의 문제를 감지하는 것은 여러 이유로 매우 어려움
- 다행히 제어 성능 모니터링(CPM, Control Performance Monitoring) 분야는 오랫동안 광범위하게 발전해 왔으며 풍부한 연구 문헌을 보유하고 있음
- CPM은 제어 성능을 평가하는 것에서 시작하며, 특히 [4]–[6]의 연구 덕분에 최소 분산 제어(MVC, Minimum Variance Control)가 산업 표준이 되었음
- 다음 단계는 성능이 좋지 않은 제어기를 진단하는 것으로, 진동(과도한 튜닝, 제어 밸브 문제, 제어기 간 상호작용) [7]–[11], 둔감하게 튜닝된 제어 루프 [12], [13], 그리고 제어 루프의 스틱션(stiction) [14]–[17]과 같은 일반적인 문제들이 연구되었음
- 이러한 방법들은 setpoint(설정값, 공정이 원하는 상태), process value(공정 값, 센서 측정), control output(제어 출력, 제어기에 의해 계산된 제어 이동)을 포함하는 closed-loop control data에서 feature을 도출하여 성능 문제를 식별하는 것을 목표로 함
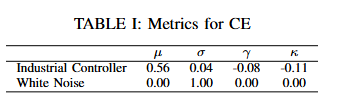
- basic statistic metrics: control error(제어 오차, 설정값과 프로세스 값의 차이)의 평균, 표준 편차, 왜도(skewness), 첨도(kurtosis) 등이 성능 문제를 나타내는 데 사용됨 [18].
- auto-correlation funcion(ACF): 폐루프 데이터의 ACF는 MVC 대비 성능 평가 [19], 진동 감지 [8], [9], 제어기의 튜닝 성능 평가 [20], [21] 등에 활용
- Impulse response(IR): IR 특성을 사용하여 튜닝 성능을 향상시킬 수 있음을 입증 [22], [23].
- 최근 머신러닝의 인기가 높아지면서 신경망 [24], PCA [25], SVM [26], 다양한 분류기 [27] 등 제어 성능 평가 및 진단에 머신러닝을 활용하는 연구가 증가했음
- 기존 CPM 방식은 방법 개발 및 튜닝, 지표 계산 등이 수고롭지만, 머신러닝은 평가와 진단을 동시에 수행할 수 있는 단일 도구를 제공
- 하지만 이러한 머신러닝 방법들은 대규모 산업 환경에 적용하는 데 세 가지 주요 한계가 있었음
- 알고리즘의 복잡성: 복잡한 알고리즘은 해석 가능성(interpretability) 문제를 야기함
- 프로세스 여기(process excitation) 필요: 일부 방법은 프로세스 여기(제어기의 설정값을 임의로 변경하거나, 제어 출력을 조작하여 시스템이 어떻게 반응하는지 관찰하는 것)를 필요로 하는데, 이는 엄격한 생산 목표를 가진 산업 제어기에서는 실행 불가능함
- 이진 분류의 한계: 가장 흔하고 중요한 문제는 루프를 "허용 가능" 또는 "허용 불가능"으로만 분류할 수 있어, 진단 정보를 제공하지 못하는 것
- 본 연구에서는 기존 머신 러닝 기반 방법의 문제점을 해결하고, 쉽게 해석하고 적용할 수 있는 제어 성능 진단 분류기를 제안
- 오직 closed-loop regular operating data만을 필요로 함
- 제어 오차 데이터와 함게 ACF 및 IR 계수 등 일부 통계적 특성을 입력으로 활용
- 이 방법으로 튜닝 상태(aggressive, sluggish, acceptable), 제어 밸브 스틱션control valve stiction), 외부 교란(external disturbance) 등 총 5가지 클래스를 식별할 수 있으며, 이는 산업용 폐루프 PID 제어기에서 관찰되는 거의 모든 주요 문제를 포함하는 것임
- Aggressive tuning (과도한 튜닝): 제어기가 너무 민감하게 반응하여 목표값을 넘나들며 시스템이 불안정하게 진동하는 경우
- Sluggish tuning: 제어기가 공정 변화나 교란에 느리게 반응하여 시스템이 목표 상태로 돌아오는 데 오래 시간이 걸리는 경우
- Stiction (스틱션): 제어 밸브와 같은 최종 제어 요소가 움직임을 시작하거나 멈출 때 마찰(friction)로 인해 발생하는 비선형적인 현상. 이는 밸브의 원활한 조절을 방해하고 주기적인 진동을 유발할 수 있음
- External disturbance (외부 교란): 공정 외부에서 주기적으로 발생하는 교란(예: 다른 루프의 영향, 장비의 주기적 작동)이 제어 루프에 유입되어 진동을 유발하는 경우
Feature Engineering, Data Collection and Labeling
- 본 연구에서는 루프의 성능 특성(Performance Characteristics)을 정의하기 위해 3가지 주요 특징인 routine closed-loop data, auto-correlation function(ACF), Impulse Response(IR)을 사용
- 히스토그램과 그 정의 특성(defining characteristics)인 평균(), 분산(), 왜도(), 초과 첨도(), 사분위수 범위()이 활용
Routine Closed-Loop Data and Associated Features
-
가장 일반적으로 수집되는 데이터는 setpoint(SP), process value(PV), controller output(OP)로 구성
-
본 논문 전체에서 일반 폐루프 데이터는 특정 샘플링 간격으로 수집된 SP, PV 및 OP와 수집된 데이터에서 계산된 CE(control error, SP-PV)를 의미
- CE 기반 메트릭 = Integral Squared Error (ISE), Integral Absolute Error (IAE), Integral of the Time Weighted Absolute Error (ITAE)
-
General Feedback Closed-Loop Control System
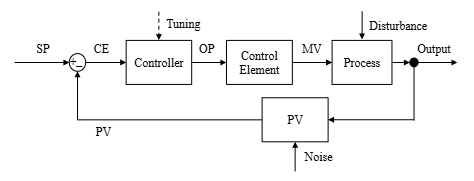
-
다양한 CE 기반 메트릭이 활용되지만, 본 연구에서는 제어 성능에 대한 통찰력을 제공하기 때문에 CE histogram을 정의하는 간단한 통계 메트릭을 사용
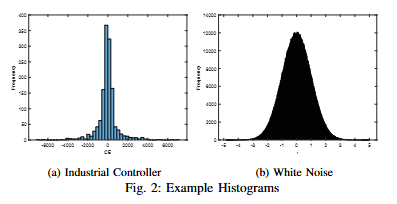
- 이상적인 컨트롤러의 CE 메트릭은 이미 알려져 있기 때문에 해당 메트릭은 해석하기 쉽다는 장점을 가지고 있음
- 이상적인 컨트롤러의 경우 CE를 가능한 한 빨리 0으로 줄이는 것이 목표이므로 을 만족해야 함
- 마찬가지로 CE 분포는 정규 분포와 유사해야 하므로 , 이어야 함
- 데이터의 중간 50%의 확산 정도를 측정하는 지표인 IQR도 이상적인 제어기에서는 0에 가까워야 함
- Valve Reversal
- 밸브의 움직임이 방향을 바뀌는 횟수로, 높으면 제어 동작이 매우 aggresive임을 나타냄
- 는 시점 의 제어 출력 신호(OP), 는 도함수, 은 부호 함수, 은 원하는 시간 주기
- 밸브의 움직임이 방향을 바뀌는 횟수로, 높으면 제어 동작이 매우 aggresive임을 나타냄
- Valve Travel
- 밸브가 이동한 총 거리로, 높으면 제어 동작이 매우 aggresive임을 나타냄
- 밸브가 이동한 총 거리로, 높으면 제어 동작이 매우 aggresive임을 나타냄
-
그러나 실제로는 피드백 작용으로 인해 항상 노이즈가 발생하므로, 이러한 이상적인 상태를 완벽하게 달성하는 것은 실질적으로 불가능함
- MVC는 노이즈가 존재하는 상황에서 달성할 수 있는 최소 분산(minimum variance)을 기준으로 삼는 제어 성능 모니터링(CPM)의 중요한 이론적 벤치마크
- MVC는 dead-time (k) 이후에는 분산이 발생하지 않는다고 가정. 여기서 dead-time은 제어 입력이 시스템 출력에 영향을 미치기까지 걸리는 시간 지연을 의미함
- 따라서, 시스템이 아무리 최적으로 제어된다고 해도, dead-time 이후에 발생하는 유일한 "분산"은 바로 시스템에 내재된 노이즈 자체의 분산이 됨. 즉, 달성 가능한 최소 분산은 노이즈의 분산과 같아짐
- = 현재 시간 로부터 dead-time 시간 이후의 시스템 출력
- = 는 시스템이 노이즈 를 어떻게 처리하여 출력 에 반영하는지를 모델링
- 이 수식은 MVC 관점에서, dead-time (k) 이후의 시스템 출력 (y)가 순수하게 노이즈 (\varepsilon)와 이를 처리하는 시스템의 특성 (F)에 의해 결정된다는 것을 보여줌
Autocorrelation Function (ACF) and Associated Features
-
자기상관 함수는 시계열 데이터가 과거 샘플과 얼마나 관련되어 있는지를 설명하므로 제어 애플리케이션에서 사용하기에 매우 유용함
-
성능이 우수한 control loop에서 ACF coefficients는 프로세스의 dead time 이후에 빠르게 0으로 감소해야 함. 이는 제어기가 교란이나 설정값 변화에 효과적으로 반응하여 시스템이 빠르게 안정화되고, 현재 데이터가 과거 데이터로부터 독립적이 된다는 것을 의미함
-
ACF의 감쇠가 너무 느리면 튜닝이 느리다는 것(Sluggish tuning)을 나타냄.
-
규칙적인 패턴은 공격적인 튜닝(aggressive tuning), 스틱션(stiction) 또는 외부 교란(external disturbance)으로 인한 진동을 나타냄
-
본 논문에서는 ACF의 영점 교차(zero-crossings, 0을 가로지르는 지점)를 사용
- = 각 영점 교차 사이의 절반 주기. 즉, ACF가 0을 한 번 가로지르고 다시 0으로 돌아오는 데 걸리는 시간의 절반
- 평균 주기
- 각 당 간격의 표준 편차가 일 때, 평균 주기의 표준 편차는
-
ACF의 규칙성은 다음과 같이 테스트
- = ACF의 규칙성으로, 은 평균 주기 의 강한 진동을 의미함
-
또한, CE와 유사하게 ACF 히스토그램을 설명하는 통계적 메트릭이 분류 특징으로 사용
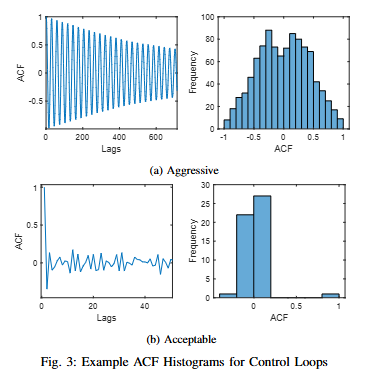
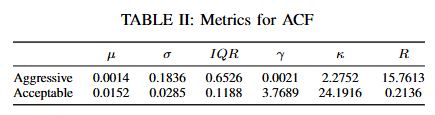
- ACF 히스토그램은 CE 히스토그램과 달리 정규 분포를 따르지 않아야 함. 왜냐하면 lag 0에서의 자기상관 계수가 항상 1이기 때문임. 즉, 데이터가 자기 자신과 완벽하게 상관되어 있기 때문에 히스토그램에 1에 해당하는 값이 강력하게 존재하게 됨
- 이러한 특성으로 인해 ACF 히스토그램은 왼쪽으로 치우친 분포(즉, )을 생성
- : ACF 계수들이 빠르게 감쇠하면, 즉 지연 시간이 늘어날수록 상관관계가 급격히 약해지면 ACF 값들의 평균()은 샘플 수()이 커질수록 0에 가까워짐. 이는 잘 작동하는 제어 루프에서 기대되는 특성임
- : ACF 계수들이 빠르게 감쇠하면, ACF 값들의 분산 또한 샘플 수가 커질수록 0에 가까워짐
Impulse Response (IR) and Associated Features
- Impulse Response(IR): 폐루프 제어 시스템에 순간적인 충격 입력(impulse input)이 가해졌을 때, 시스템이 시간에 따라 어떻게 반응하며 원래의 안정 상태로 돌아가는지 보여주는 응답
- 이 응답의 특성은 컨트롤러가 외부 교란이나 설정값 변화에 얼마나 잘 대처하는지, 즉 컨트롤러의 튜닝 품질(tuning quality)을 나타내는 강력한 지표가 되며, 이상적인 컨트롤러는 충격 입력에 대해 빠르고 부드럽게 감쇠하여 원래의 안정 상태로 돌아와야 함
- IR의 직접적인 추정은 본 논문의 범위에서 벗어나고, 자기회귀(Autoregressive, AR) 모델을 이동평균(Moving Average, MA) 형태로 변환함으로써 IR을 쉽게 얻을 수 있다고 함
- AR: 현재 시점의 값()이 과거 개 시점의 값과 현재의 white noise에 의해 결정되는 모델
- MA: 현재 시점의 값()이 현재의 과거 개 시점의 white noise 항의 선형 조합으로 표현되는 모델
- AR: 현재 시점의 값()이 과거 개 시점의 값과 현재의 white noise에 의해 결정되는 모델
- AR 모델을 MA 형태로 변환하면, 시스템에 가해진 순간적인 충격(백색 잡음 (\epsilon_t))이 시간이 지남에 따라 시스템 출력에 미치는 영향을 계수()로 직접 파악할 수 있으며, 이 계수들이 곧 임펄스 응답 계수가 됨
- 통계적 지표로 평균(), 분산(), 왜도(), 첨도(), 사분위 범위()을 활용
- 성능이 우수한 컨트롤러는 IR의 감쇠가 빨라야 하고 반복되는 패턴을 보이지 않아야 함
Data Collection, Classes and Feature Selection
- 데이터 출처: 분류 모델 학습 및 라벨링을 위한 데이터는 2가지 산업용 데이터셋에서 얻음
- 클래스 불균형 해소: 특정 클래스의 데이터가 부족하여 불균형이 발생할 경우, 간단한 피드백 제어 루프를 시뮬레이션하여 추가 데이터를 생성
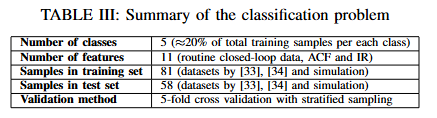
- 정의된 클래스: PID 제어기에서 발생하는 대부분의 주요 제어 문제를 포괄하는 5가지 클래스를 사용
- Stiction (STC): 밸브 스틱션(움직임 멈춤) 문제
- Acceptable (ACC): 허용 가능한 성능을 보이는 루프
- Aggressive Tuning (AGG): 너무 공격적으로 튜닝되어 진동을 유발하는 루프
- Sluggish Tuning (SLG): 너무 둔하게 튜닝되어 반응이 느린 루프
- External Disturbance (EXD): 외부 교란으로 인해 성능 문제가 발생하는 루프
- 특징 선택
- 모델 성능을 향상시키고 예측의 계산 비용을 줄이기 위해 필요한 특징만 선별
- 본 연구에서는 두 가지 널리 사용되는 greedy hill climbing algorithm을 사용
- 순차적 전진 선택(Sequential Forward Selection, SFS): 특성이 없는 상태에서 시작하여 각 반복 단계에서 모델 성능을 가장 많이 향상시키는 하나의 특성을 추가
- 순차적 후진 선택(Sequential Backward Selection, SBS): 모든 특성 포함된 상태에서 시작하여 각 반복 단계에서 모델 성능에 가장 적은 영향을 미치거나 오히려 성능을 저하시키는 하나의 특성을 제거
- 간결성을 고려하여 Naïve Bayes 분류기를 예측기로 사용
- 최종적으로 SBS가 더 나은 훈련 정확도를 보여주었으며, 다음 11가지 특징이 최종적으로 선택됨 (나머지 7개 특징 제거)
- / /
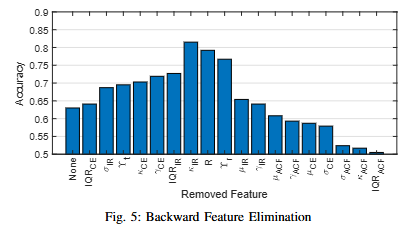
- / /
- 데이터셋 분할: 훈련셋 60%와 테스트셋 40%로 분할
- 검증 방법: 계층적 샘플링(stratified sampling)을 통한 5-fold cross validation을 사용하여 각 클래스별 관측치 수가 훈련 및 테스트 세트에서 대략적으로 균형을 이루도록 보장함
Supervised Learning Classification
-
분류기 선택
- Na¨ıve Bayes (NB), K-Nearest Neighbors (KNN), Discriminant, Support Vector Machines(SVM), Decision Trees (DT), Ensemble classifiers를 모두 테스트
- 각 분류기는 Hyper-parameter optimization을 거쳐 학습되었음
- 학습된 분류기들은 미리 준비된 테스트 데이터셋을 사용하여 성능을 평가했고, 평가 지표는 Accuracy를 사용
-
성능 평가
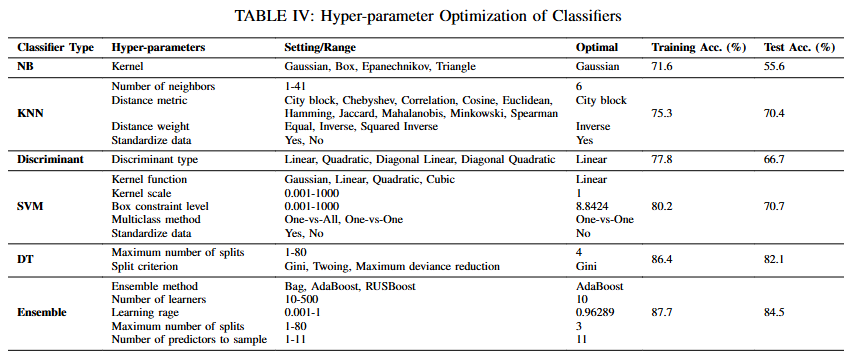
- AdaBoost Ensemble 분류기(세 개의 분할(splits)을 가진 결정 트리를 포함)가 가장 우수한 성능을 보임 (87.7%의 훈련 정확도와 84.5%의 테스트 정확도를 달성)
- 분류기는 문제가 있는 루프를 정상 루프와 구별하는 데 매우 높은 정확도를 보였음. 단 하나의 'sluggish tuning' 루프만이 'acceptable'로 오분류됨
- 하지만, stiction' 클래스와 'external disturbance' 클래스 간에 가장 큰 혼동이 발생
- 외부 교란(external disturbance) 문제가 있는 일부 루프에서 스틱션(stiction)에서 흔히 나타나는 왜곡된 타원형 PV-OP 패턴이나 전형적인 외부 교란 루프보다 약간 낮은 밸브 반전(valve reversal) 수치를 보이는 등, 두 클래스 간의 "지문(fingerprints)"이 겹치는 경우가 있었음
- PV-OP 패턴: 제어 시스템의 프로세스 값(PV)과 컨트롤러 출력(OP)을 시간에 따라 함께 기록한 데이터를 2차원 그래프로 그렸을 때 나타나는 모양으로, 대부분의 경우, PV와 OP는 서로를 따라다니며 안정적인 닫힌 곡선(closed loop) 형태를 그리거나, 선형적인 관계를 보임
- 밸브에 스틱션이 있으면, 컨트롤러가 OP를 조절해도 밸브는 특정 구간에서 움직이지 않다가(stick) 갑자기 툭 움직이고(slip) 목표치를 넘어서고 이 과정이 반복
- OP가 변해도 PV가 한동안 변하지 않거나, 갑자기 크게 변하는 구간들이 생기면서 정상적인 닫힌 곡선이 아니라 찌그러지거나 각진 타원형, 심지어 직사각형에 가까운 불규칙한 고리(loop) 형태를 띠게 됨
- 밸브 반전: OP 신호의 방향이 바뀌는 횟수를 측정한 지표를 의미
- 스틱션이 있는 경우: 밸브가 원하는 만큼 움직이지 않거나 너무 많이 움직이므로, 컨트롤러는 PV를 목표값에 맞추기 위해 OP를 계속 수정하고 방향을 자주 바꿔야 함. 따라서 밸브 반전 수치가 높게 나타냄
- 외부 교란이 있는 경우: 큰 외부 교란이 들어오면 PV가 목표값에서 크게 벗어남. 컨트롤러는 이 교란에 대응하여 PV를 다시 잡기 위해 OP를 크게, 그리고 매우 자주 조절하므로, 전형적으로 밸브 반전 수치가 매우 높게 나타남
- 외부 교란의 특성이 밸브를 아주 공격적으로 움직이게 하지는 않았을 수 있으며, 그 결과 밸브 반전 수치가 오히려 스틱션이 있는 루프에서 나타나는 수치 범위와 비슷해져서 외부 교란이 있었던 일부 루프에서 예상했던 '매우 높은' 밸브 반전 수치 대신, '전형적인 외부 교란 루프보다 약간 낮은' 밸브 반전 수치가 관찰되었다는 의미
- PV-OP 패턴: 제어 시스템의 프로세스 값(PV)과 컨트롤러 출력(OP)을 시간에 따라 함께 기록한 데이터를 2차원 그래프로 그렸을 때 나타나는 모양으로, 대부분의 경우, PV와 OP는 서로를 따라다니며 안정적인 닫힌 곡선(closed loop) 형태를 그리거나, 선형적인 관계를 보임
- 외부 교란(external disturbance) 문제가 있는 일부 루프에서 스틱션(stiction)에서 흔히 나타나는 왜곡된 타원형 PV-OP 패턴이나 전형적인 외부 교란 루프보다 약간 낮은 밸브 반전(valve reversal) 수치를 보이는 등, 두 클래스 간의 "지문(fingerprints)"이 겹치는 경우가 있었음
- 비록 분류기가 문제의 카테고리를 잘못 예측할 수는 있지만, 문제가 있는 루프를 놓치는 경우(acceptable로 오분류하는 경우, 즉 낮은 오음성률(false negative rate))는 매우 드물다는 점이 산업 현장에서의 실용성을 높여줌
Testing of the Classifier with Industrial Data
-
가장 우수한 성능을 보인 AdaBoost Ensemble 분류기를 실제 산업 데이터에 적용하여 그 성능을 검증
-
사용된 데이터셋
- 이전 학습 및 테스트에 사용되지 않은, 완전히 새로운(unseen) 산업 데이터셋
- Perstorp 생산 시설에서 수집되었으며, 총 160개의 제어 루프(control loops)를 포함
- 유량(flow), 압력(pressure), 온도(temperature), 레벨(level), 농도(concentration), 밀도(density) 등 다양한 유형의 제어기가 포함되어 있어 실제 산업 환경의 복잡성을 반영
-
True Label 결정 방법
- 제1저자가 이전 연구([31], [37])에서 개발한 툴박스 분석
- 53가지의 다양한 지표와 전반적인 알고리즘을 포함하는 기존의 제어 성능 모니터링(Conventional CPM) 방법론
- 해당 회사의 공정 제어 전문가(process control experts)들에 의한 최종 검증
-
결과
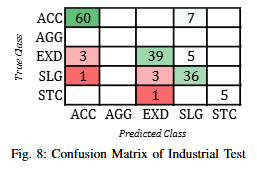
- 전체 문제에 대한 예측 정확도(accuracy)는 88%에 달함
- 문제 있는 루프를 '정상(acceptable)'으로 잘못 분류하는 오탐율(false negative rate)은 3%로 매우 낮았음. 이는 분류기가 실제 문제를 놓치지 않고 잘 감지한다는 것을 의미
Conclusion and Future Work
Conclusion
- 해당 분류기는 제어 엔지니어에게 해석하기 쉽고 신뢰할 수 있는 결과를 제공함
- 산업용 컨트롤러에서 일반적으로 수집되는 routine closed-loop operating data만을 필요로 함
- 분류에 사용된 특징(features)은 주로 널리 사용되는 제어 오차(Control Error, CE), 자기상관 함수(Auto-Correlation Function, ACF), 임펄스 응답(Impulse Response, IR) 플롯의 히스토그램을 기반으로 함
- 이러한 특징들을 계산하는 데 높은 계산 자원이 필요하지 않아, 데이터를 자동으로 가져와 분석하고 데이터베이스에 기록하는 온라인 방식 또는 엔지니어가 데이터셋을 제공하여 결과를 얻는 오프라인 방식 모두 적용 가능
Limitation
- 산업용 제어 루프는 종종 여러 가지 문제(예: stiction과 외부 교란이 동시에 발생하는 경우)를 겪을 수 있음
- 본 연구에서 개발된 분류기는 이러한 경우, 가장 두드러지는(major) 문제 하나만을 감지할 수 있음
Future Work
- 다중 라벨 분류(Multi-label classification): 여러 문제가 동시에 발생하는 루프에 대해 더 나은 진단 정보를 제공하기 위해 다중 라벨 분류 기법을 연구할 수 있음
- 새로운 문제 클래스 추가: 충분한 산업 데이터를 확보할 수 있다면 노이즈(noise), 양자화(quantization), 센서 동결(sensor freeze)과 같은 다른 제어 루프 문제들을 새로운 클래스로 추가하여 분류기를 훈련하고 테스트할 수 있음
- 플랜트 전체(plant-wide) 동학 통합: Granger causality, spectral envelope, transfer entropy와 같은 플랜트 전체 공정 상호작용 감지 방법들을 통합하여 외부 교란의 근본 원인을 더 깊이 분석할 수 있음
