산업공학특론 논문 패널 리뷰
- 본 내용은 Intelligent PID Gain Selection via Supervised Machine Learning Approach for Decoupled MIMO Control Systems 논문을 읽고 정리한 내용입니다.
- 논문 원본은 해당 링크에서 다운받으실 수 있습니다.
Contribution
- PID 최적화에 대한 기존 연구의 대부분은 유전 알고리즘(GA) 및 입자 군집 최적화(PSO)와 같은 진화 알고리즘 또는 강화 학습에 초점을 맞추고 있지만, 디커플러를 사용한 MIMO PID 튜닝에서의 구체적인 사용은 충분히 연구되지 않았음
Introduction
- 본 연구는 decoupler가 장착된 PID 기반의 MIMO(Multiple-Input Multiple-Output) 제어 프레임워크에 중점을 두고 있음
- MIMO 시스템에서는 각 입력과 출력 채널 사이에 상호 간섭(cross-coupling)이 발생할 수 있는데, 디커플러는 이러한 간섭을 줄여 각 채널이 서로 영향을 덜 받으면서 독립적으로 제어될 수 있도록 돕는 장치
- PID Gain Parameter 튜닝은 Supervised Learning을 사용한 Classification Task로 재구성
- 다양한 분류 모듈을 활용하여 분류기가 최적의 이득 조합을 얼마나 잘 선택하는 지 평가
- 4개의 지도 학습 알고리즘 - Naïve Bayes Classifier (NBC), Random Forest Classifier (RFC), Support Vector Machine Classifier (SVMC), and Logistic Regression Classifier (LRC)가 Proposed Model 내에 통합
- 이 분류기들은 경쟁 모델로 평가되지 않고 성능 클래스(Class1 : 높음, Class2 : 중간, Class3 : 낮음)별로 분류된 레이블이 지정된 합성 데이터셋에서 최상의 이득값을 선택하기 위한 메커니즘으로 평가
- 결과적으로, 정착 시간(Settling time), 안정성 마진(Stability margins), 개루프 응답(Open-loop responses)와 같은 동적 출력을 평가
- Settling time: 시스템의 출력이 목표값에 도달하여 일정 범위 내에서 안정화되는 데 걸리는 시간
- Stability margins: Gain margin과 Phase margin을 포함하여, 시스템이 불안정해지기 전까지 얼마나 많은
- Open-loop responses: 제어 루프가 닫히기 전, 시스템의 입력에 대한 출력 반응을 분석하는 것
- MIMO 시스템에서 PID 컨트롤러를 독립적으로 튜닝할 때 cross-coupling 때문에 성능 저하가 발생
- MIMO 시스템은 여러 개의 입력과 여러 개의 출력을 가지는 복잡한 제어 시스템
- MIMO 시스템에서 중요한 문제는 상호 간섭(Cross-coupling)으로, 한 입력이 특정 출력에 영향을 미치는 것뿐만 아니라 다른 출력에도 동시에 영향을 미치는 현상을 의미
- Ziegler-Nichols 및 Cohen-Coon과 과 같은 heuristic, rule-based approach는 SISO(Single-Input Single-Output) 시스템을 위해 개발되었으며, 비선형성, 시스템 불확실성, 교차 결합 효과로 어려움을 겪는 경우가 많음
- 대조적으로 제안된 데이터 기반 접근 방식은 성능 데이터를 기반으로 지도 분류를 사용하여 지능적인 선택을 가능하게 함
- 본 연구의 목표는 다음과 같음:
- integrated decoupler를 사용하여 MIMO-based PID controller를 모델링
- AI/ML classification을 적용하여 PID gain value를 최적화
- 향상된 제어 정확도, 더 빠른 시스템 응답, 더 나은 에너지 효율성, 향상된 안정성 및 견고성, 모델 전송 가능성을 포함
The Proposed PID Controller with MIMO System
-
본 연구에서는 고려 중인 MIMO 시스템이 3개 또는 4개 입력으로 구성된 Linear Square Stable Non-Singular(LSSNS) 시스템이라고 가정
- Linear: 시스템의 입력과 출력 관계가 선형 방정식을 따른다
- Square: 시스템 행렬 이 행과 열의 개수가 같은 정방 행렬
- Non-Singular (비특이): 행렬이 역행렬을 가진다 (행렬식이 0이 아니어야 역행렬을 가질 수 있음)
- 시스템 행렬 은 가장 큰 비특이 부분행렬이 0이 아닌 행렬식을 가지면 LSSNS로 간주되며, 이는 full rank를 나타냄
-
비선형 시스템은 복잡하여 직접 제어기를 설계하기 어렵기 때문에, 특정 작동점(평형점, equilibrium point) 주변에서 선형 모델로 근사하는 것이 일반적인 접근 방식임 (비선형 미분 방정식으로 표현된 시스템을 제어하기 위해 선형화하는 과정을 거침)
- 비선형 미분 방정식 시스템
- 시스템의 상태 변수 와 의 시간에 따른 변화율이 각각 비선형 함수 와 에 의해 결정됨을 나타냄. 즉 와 가 어떻게 변하는지 설명하는 비선형 동역학 모델
- 평형점 의 가정
- 평형점은 시스템의 상태 변화율이 0이 되는 지점을 의미. 이 지점은 시스템이 정지해 있거나, 일정한 상태를 유지하는 경우로 시스템을 선형화할 때 기준이 되는 중요한 작동점
- 비선형 함수 선형화
- 비선형 함수 와 를 평형점 주변에서 테일러 급수의 1차 항까지 전개하여 선형으로 근사한 것
- = 함수 를 에 대해 편미분한 후 평형점에서 평가한 값으로, 평형점 근처에서 의 변화에 대한 의 민감도를 나타내는 상수 계수
- = 상태 변수 가 평형점 로부터 얼마나 벗어나 있는지를 나타내는 편차(deviation)
- 선형화된 시스템
- 선형화된 와 표현을 원래의 비선형 미분 방정식에 대입하여 얻은 ㅣ스템
- 편미분 항들은 모두 상수로 취급되며, 시스템은 이제 와 라는 새로운 변수에 대한 선형 미분 방정식이 됨
- 이러한 선형화된 모델은 평형점 근처에서만 유효하며, 이 모델을 통해 선형 제어 이론의 강력한 도구들을 사용하여 PID 제어기와 같은 제어 시스템을 더 쉽게 설계하고 분석할 수 있음
- 비선형 미분 방정식 시스템
-
전체적인 아키텍쳐
- 본 연구는 MIMO 시스템에서 PID 제어기의 자동 튜닝을 위한 AI/ML 지원 알고리즘 개발을 목표로 함
- 첫 번째 단계는 적절한 구조적 모델을 선택하는 것
- 기존 산업 현장에서는 MIMO 제어를 위해 2개의 PID 제어기를 사용할 수 있지만, 본 연구에서는 미리 정의된 cross-coupling 구조 없이 3개의 PID 제어기를 구현
- 각 PID 제어기의 출력에 Decoupler를 도입하여 MIMO plant에 통합
- 이 Decoupler는 시스템의 cofactor matrix를 기반으로 설계되며, 각 제어 루프가 독립적으로 작동하도록 하여 전반적인 제어 성능을 향상시킴
- MIMO 시스템에서 디커플링된 출력 값인 는 CSV로 저장된 다음 AI/ML Classification model의 입력으로 사용됨
-
제안하는 모델의 최종 버전
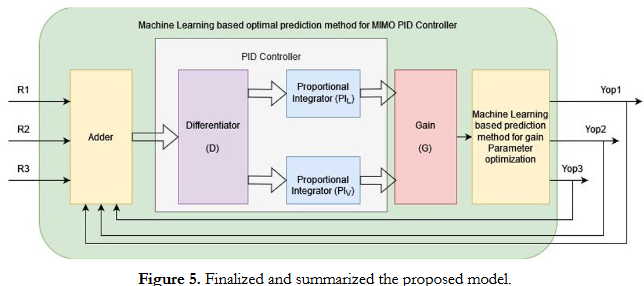
- AI/ML Classifier를 PID Control loop에 직접 내장하여 classifier가 input-output data에서 최적의 gain 값을 예측하여 manual gain selection process를 대체
- 제어 아키텍쳐에는 differentiator, proportional integrators, gain block, machine learning-based optimization module 등과 가은 구성 요소가 포함
- 결과적으로 최적화된 출력 는 closed-loop performance evaluation을 위해 시스템에 다시 공급
3.1 Decoupling the PID
- MIMO 시스템은 여러 입력과 여러 출력을 가지며, 각 제어 루프(control loop) 간에 동적 상호작용(dynamic interactions), 즉 크로스-커플링(cross-coupling)이 발생할 수 있음.
- 이러한 상호작용은 각 PID 컨트롤러가 독립적으로 튜닝될 때 시스템 성능을 저하시킬 수 있음
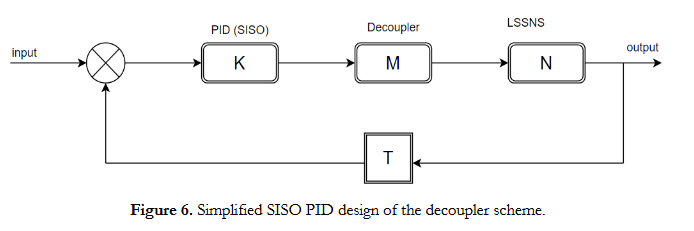
- decoupling scheme는 simplified SISO PID configuration에 기반하며, 여기서 는 대각 PID 제어기, 은 디커플러의 전달 함수 행렬, 은 플랜트 전달 함수 행렬, 는 피드백 경로
- 디커플러의 목적은 다변수 시스템을 대각화하여 동적 상호 작용(dynamic interactions)과 시간 지연(temporal delay)을 최소화하는 것
3.2 Modeling the PID
-
제어 시스템은 unit step input 를 받아 가산기(Adder) 통해서 미분기(Differentiatior)로 전달
-
미분기는 디커플러와 함께 신호를 2개의 proportional-integral branch, 과 로 분할하는데, 이 branch는 원치지 않은 동작으로 인한 오류로 간주되는 intermediate outputs 를 생성
-
발생한 오류는 음성 피드백(negatively fed back)되어 입력값을 조정하여 업데이트된 입력 를 생성
- = 원래 입력, = 오차항
-
업데이트된 는 미분기를 거쳐 다음과 같이 선형화됨. 이 선형화된 구성 요소는 디커플링된 구조의 입력으로 사용
-
Mason's Gain theory를 사용하여 디커플링된 출력이 계산
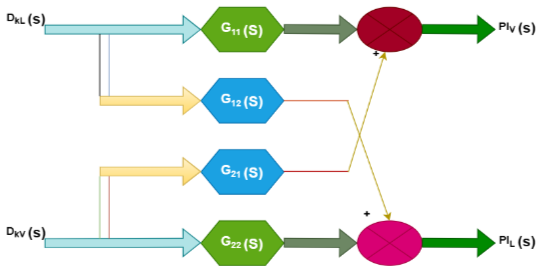
- = 시스템의 internal gain factor
- = 시스템의 internal gain factor
-
디커플링된 출력은 PID의 gain optimization factor 를 계산하는 데 사용
- = Proportional Gain, = Integral Gain, = 적분 항(주파수 도메인 )
-
만약 resulting gain 이 만족스럽지 않으면, 오류가 최소화될 때까지(0에 가까워질 때까지) input adder로 피드백되어 과정이 반복됨
- 오차 와 최적화된 출력 사이의 관계
- = 시스템의 오차항들의 합으로, 원하는 동작과 실제 동작 사이의 차이
- = 오차 계수(Error Factor)로, 오차를 최적화된 출력에 비례시키는 스케일링 요소
- = 시스템의 최적화된 출력항들의 합으로, 시스템의 오차가 최적호된 출력과 어떤 비례 관계를 갖는지를 정의
- 이 반복 과정은 오차가 최소화될 때까지 계속됨
- 오차가 최소화되면, 이 식의 조건이 충족됨
- = 원래의 입력 신호들의 합으로, 시스템이 추종해야 할 목표값
- = 오차 피드백을 통해 업데이트된 입력 신호들의 합
- 오차 와 최적화된 출력 사이의 관계
-
오차 최소화 조건이 충족되면 이 시점에서 얻어진 이득 값(와 같은 제어 이득 또는 와 같은 최적화 요소)이 AI/ML Classifier를 훈련시키는 데 사용
-
Classifier는 optimized gain 와 최종 출력 를 생성
- = 최적화된 출력 게임 행렬
- = General Model(GM)의 전달 함수 행렬 의 행렬식(determinant)를 나타냄, MIMO 시스템에서 은 여러 입출력 간의 관계를 나타내는 행렬
- GM의 전달 함수 행렬을 의미하며, MIMO 시스템에서 각 입출력 간의 coupling을 포함
- = 최종적으로 도출되는 Optimized Gain Matrix
3.3 Algorithm for the PID Design Scheme
-
PID 튜닝 프레세스
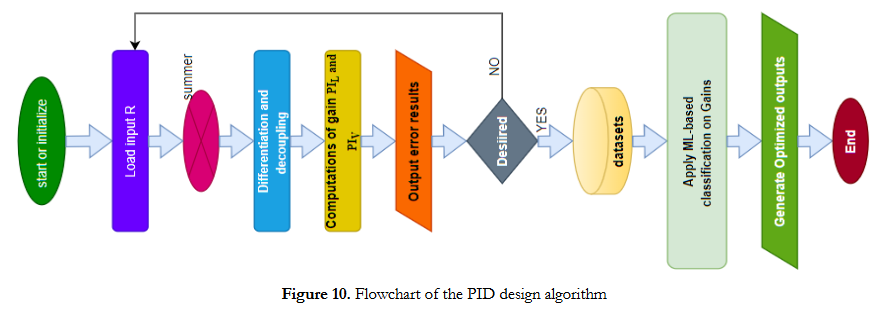
- Processing model 초기화 및 로드
- step inputs 로드
- Adder/Summer 연산 수행
- 미분하고 로 분리
- Gain value 계산
- output errors 생성
- Gain value 계산
- ㄹeedback errors 이면 오류를 피드백
- 1~5 단계 반복
- Gain value에 AI/ML-based classification 적용
- optimized outputs 를 생성
- 최소 Integral Absolute Error (IAE) 달성되면 최종 값 저장
3.4 Application of Machine Learning to PID-Based Design: A Case of MIMO Systems
- Python 및 MATLAB을 사용하여 머신러닝을 PID 튜닝 프레임워크에 통합하는 것을 평가
- data privacy와 reproducibility(재현성)을 위해 Synthetic datasets을 사용
3.4.1 Synthetic Datasets Creation
- 데이터셋은 Standard normal distribution의 log-normal transformation을 사용하여 생성
- = 4.4~4.5, = 0.5~1.0, 이고, 각 행은 4개의 값을 포함하며, 총 샘플 수는 300개
3.4.2 Classification Based on Gain Quality
- Gain Vector는 시스템 성능 평가 후 3개의 클래스로 레이블링됨
- Class 1 = High-performing (low error, fast settling)
- Class 2 = Moderate
- Class 3 = Low-performing
3.4.3 제안된 PID 모델에 대한 AI/ML 적용
- Supervised Classifier는 레이블링된 합성 데이터를 기반으로 최적의 게인 구성(gain configuration)을 식별하는 데 사용
- Random Forest, Naïve Bayes, Support Vector Machine, Logistic Regression의 4가지 알고리즘이 사용
- RFC (Random Forest Classifier)
- 강점: 복잡한 비선형 데이터를 잘 처리하며, 어떤 특징(feature)이 중요한지 알려주는 기능을 제공합니다.
- PID 튜닝 정당성: MIMO 시스템에서 게인 값들 간의 상호 의존적인 관계를 처리하는 데 적합합니다.
- NBC (Naïve Bayes Classifier)
- 강점: 빠르고 작은 데이터셋에도 효과적이며, 예측에 대한 확률적 출력을 제공합니다.
- PID 튜닝 정당성: 가볍고 실시간 게인 분류를 지원하여 빠른 응답이 필요한 시스템에 유리합니다.
- SVMC (Support Vector Machine Classifier)
- 강점: 데이터 클래스 간에 견고한 결정 경계를 생성하며, 커널(kernel) 기반 분리를 통해 복잡한 패턴을 처리할 수 있습니다.
- PID 튜닝 정당성: 복잡하고 비선형적인 게인 값의 경계를 효과적으로 다룰 수 있습니다.
- LRC (Logistic Regression Classifier)
- 강점: 모델의 결과가 해석 가능하며, 확률적 추정치를 출력합니다.
- PID 튜닝 정당성: 튜닝 결정 과정이 명확하고 설명 가능하여 시스템 제어의 투명성을 높입니다.
- RFC (Random Forest Classifier)
- 전체 Proposed Model(PM) 구조는 일정하게 유지하면서 분류기 모듈만 변경됨
Results and Discussion
4.1 Result Generation Procedures
- 시스템 구성 요소는 Adder 블록부터 Gain 블록까지 MATLAB을 사용하여 구현
- gain optimization process는 ML Classifier를 적용하기 위해 Python(Anaconda 3)을 사용하여 실행
- 생성된 optimized gain은 final output인 를 시뮬레이션하기 위해 MATLAB으로 다시 전송
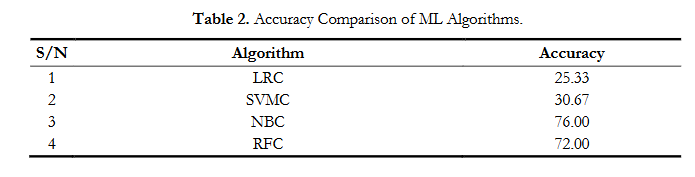
4.2 Machine Learning Optimization Using Classifier
-
optimized gain values()는 Python 환경을 사용하여 분류 - 모델을 통해서 예측하는 값
-
데이터셋은 75:25 비율로 훈련 및 테스트셋으로 나뉘었으며, 훈련에 225개 샘플이 사용되고 테스트에 75개의 샘플이 사용
-
정확도 외에도 각 분류기에 대한 confusion matrix를 평가하여 올바른 분류와 오분류 유형을 평가
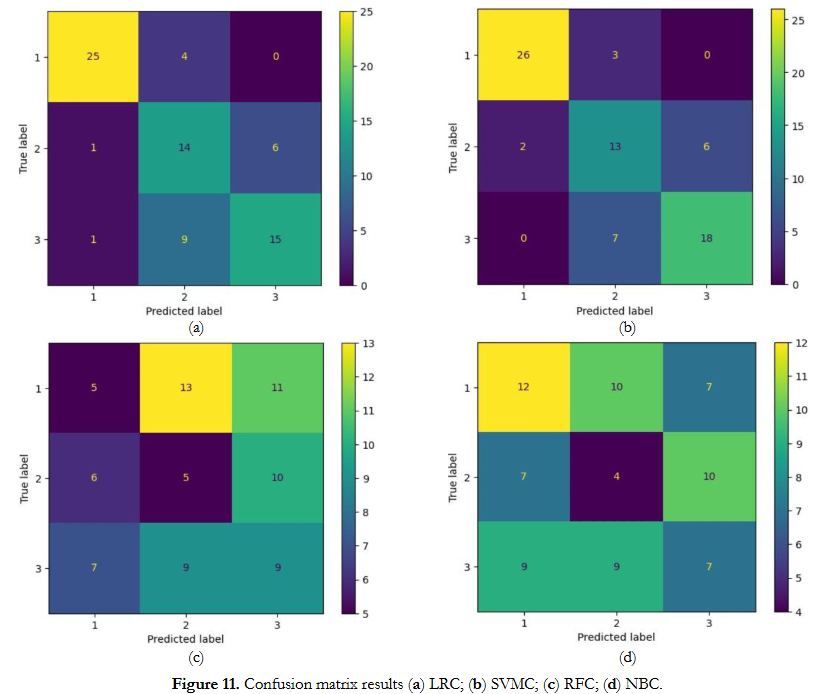
4.2.1 Logistic Regression Classifier (LRC)
- 클래스 2와 3 간의 높은 오분류를 보여주며, 클래스 3의 9개 샘플이 클래스 2로 예측되고 클래스 2의 6개 샘플이 클래스 3으로 오분류되었음
- 이는 모델이 중간 및 낮은 이득 품질을 구별하는 데 어려움을 겪고 있음을 보여줌
4.2.2. Support Vector Machine Classifier (SVMC)
- LRC보다 더 나은 클래스 분리를 보여줌 (클래스 1은 더 높은 정확도(26개 정답)로 예측되지만 클래스 3에는 여전히 약간의 혼동이 남아 있음)
4.2.3. Random Forest Classifier (RFC)
- 높은 대각 지배력을 보여주며, 클래스 1에서 25개의 샘플과 클래스 3에서 15개의 샘플이 올바르게 분류되었음
- 클래스 1과 2 사이에 약간의 혼동이 있지만 그래도 성능 괜찮음
4.2.4. Naïve Bayes Classifier (NBC)
- NBC는 클래스 1에서 3까지 각각 26개, 13개, 18개의 샘플이 올바르게 분류되어 전반적으로 최고의 성능을 보여줌
- 최소한의 비대각 노이즈는 클래스 전반에 걸쳐 높은 정밀도와 재현율을 나타냄
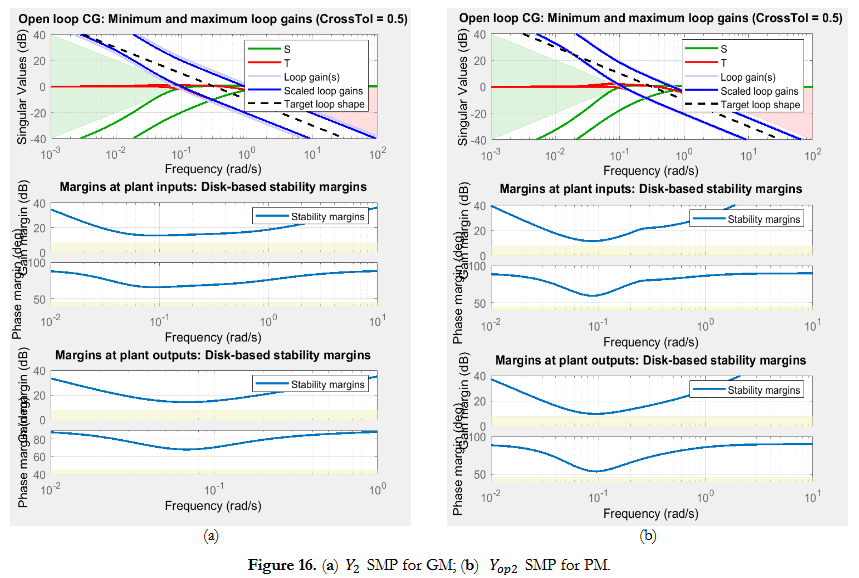
4.3 Comparative Analysis of the EM and PM from the MATLAB Generated Results
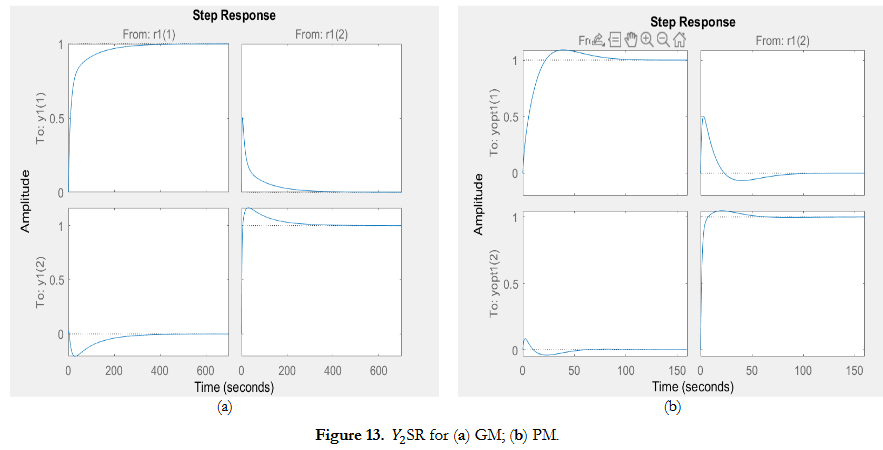
4.3.1 Step Response Graphs(SR)
- Step Response = 제어 시스템에서 갑작스러운 입력 변화가 주어졌을 때, 시스템의 출력이 어떻게 변화하는지 시간 경과에 따라 나타낸 그래프
- 이 그래프를 통해 시스템의 동적 특성과 안정성을 평가할 수 있음
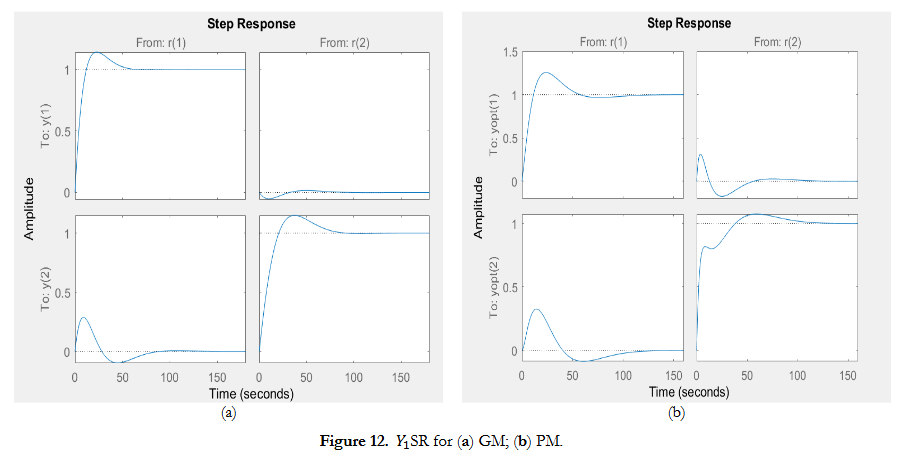
- 기존 모델(GM)의 은 약 110초 만에 정상 상태에 도달하고, 제안된 모델(PM)의 은 약 90초 만에 정상 상태에 도달
- 이는 PM이 GM보다 약 20초 더 빠르게 안정적인 상태에 도달함을 의미하며, "지연 시간(delay time)"이 감소했다고 해석됨
- GM은 약 130초 만에 정상 상태에 도달하고, PM은 약 110초 만에 정상 상태에 도달
- 이 또한 PM이 GM보다 약 20초 더 빠르게 안정화됨을 보여줌
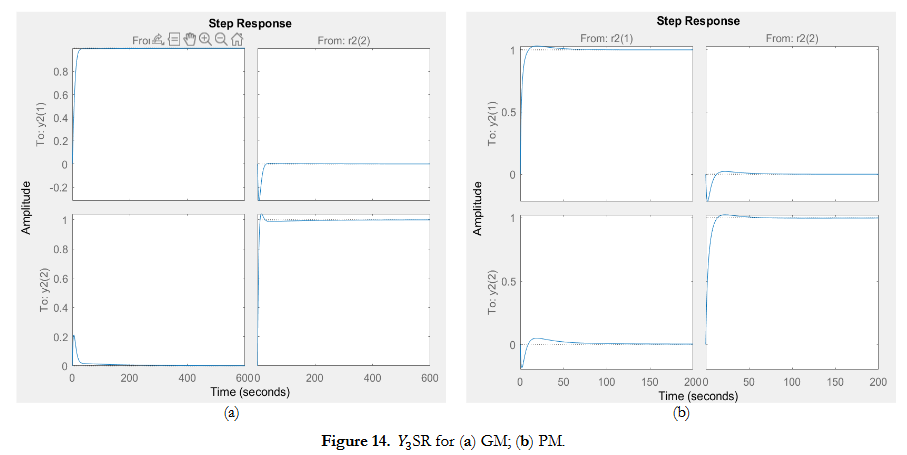
- GM 는 140초에 정상 상태에 도달하고, PM 는 90초에 안정화

- 요약하면, GM은 평균 238.33초의 정착 시간(settling down time)을 갖는 반면, PM은 93.33초의 정착 시간을 가짐
- 따라서 제안한 모델이 정상 상태로 정착하는 데 지연이 적다는 것을 추론할 수 있음
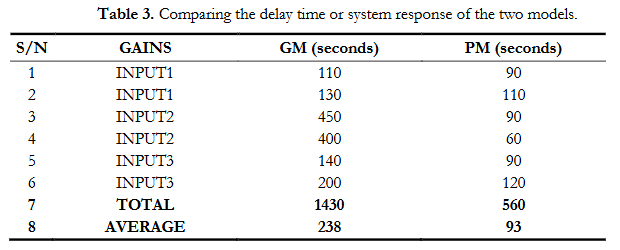
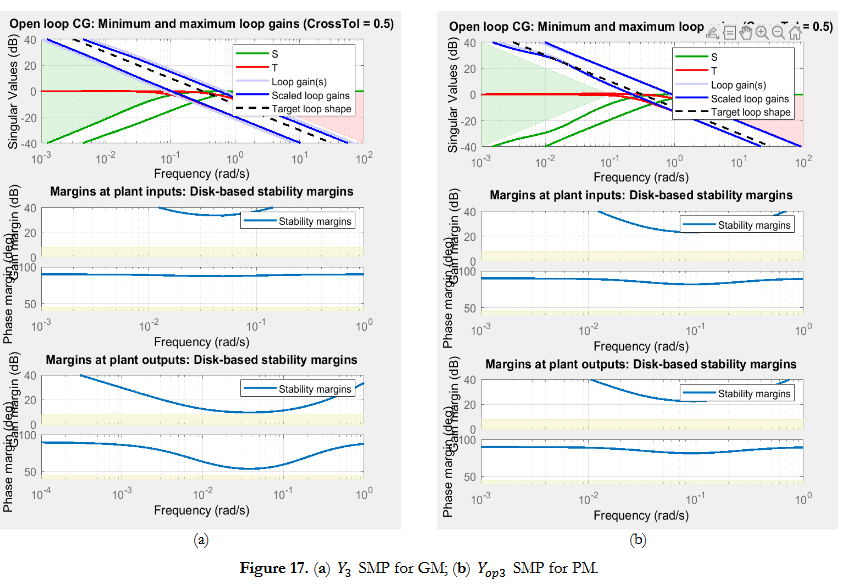
4.3.2 Stability Margin Plots, Maximum and Minimum Loop Gain Plots (SMP)
- GM과 PM에 대한 Maximum and Minimum Loop Gain Plots과 open loop gain plots을 포함
- 그래프에 대한 설명
- 상단 그래프 (Open loop CG: Minimum and Maximum loop gains)
- = Sensitivity function으로, 시스템이 외부 교란에 얼마나 민감한지를 나타내는 값. 낮을수록 외부 교란에 대한 강건성이 높음
- = Complementary sensitivity function으로, 시스템이 레퍼런스 신호를 얼마나 잘 추종하는지, 그리고 측정 노이즈에 얼마나 강인한지를 나타냄. 낮을수록 고주파 노이즈에 강함
- Loop gains = 개루프(open-loop) 전달 함수의 이득을 나타냄
- Scaled loop gains = 스케일링된 개루프 이득의 최소 및 최대값을 나타냄, robustness 분석에 사용
- Target loop shape = 설계자가 원하는 이상적인 개루프 이득의 형태를 나타냄. 시스템이 이 점선에 얼마나 잘 부합하는지가 성능과 강인성을 평가하는 중요한 지표가 됨
- 중간 그래프 (Margins at plant inputs: Disk-based stability margins) & 하단 그래프 (Margins at plant outputs: Disk-based stability margins)
- Stability margins (파란색 선): 플랜트 입력(plant inputs)에서 디스크 기반(disk-based) 안정성 마진을 보여줌. 디스크 기반 마진은 시스템의 불확실성을 고려한 안정성 분석 방법임.
- Gain Margin (dB): 이득 마진은 시스템이 불안정해지기 전에 이득을 얼마나 더 높일 수 있는지를 나타냄. 값이 클수록 외부 교란에 더 강하고 안정성이라고 평가됨.
- Phase Margin (deg): 위상 마진은 시스템이 불안정해지기 전에 위상을 얼마나 더 변화시킬 수 있는지를 나타냄. 즉 위상 지연의 양을 정도로 나타냄. 값이 클수록 시스템은 더 안정적이고, 진동 없이 빠르게 목표 값에 도달하는 경향이 있음
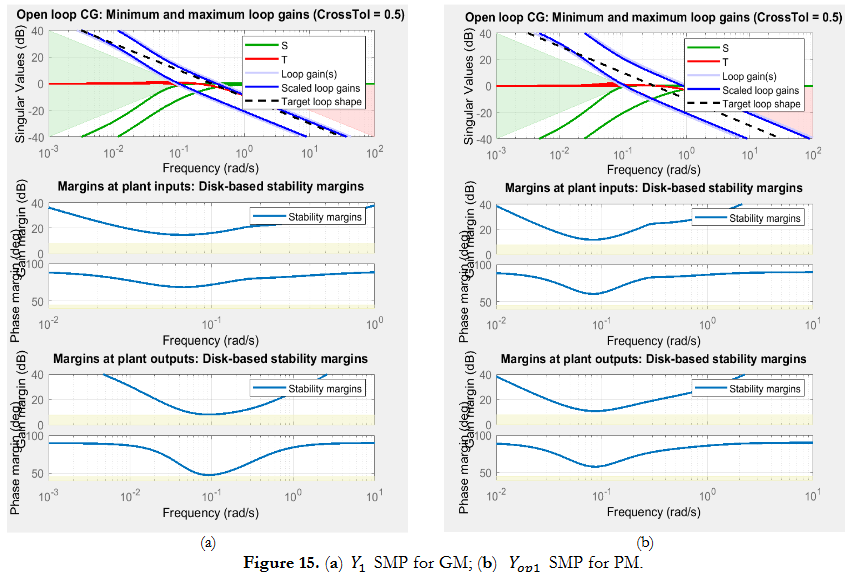
- Gain margin의 경우, GM 은 최소 입력 약 18dB에서 최소 출력 8dB로 감소했으며, 최대 입력은 38dB에서 40dB로 변경되었지만, PM 는 최소 입력 및 출력 15dB에서 최대 입력 및 출력 40dB로 안정적이고 변함이 없었음 --> 따라서 PM의 동일한 값의 gain value는 곡선에 큰 변화가 없어 더 높은 안정성과 향상된 정밀도를 나타냄
- Phase margin의 경우, GM 은 입력 시 약 75도에서 50도로 감소했으며, 최대 입력은 80도에서 90도로 증가되었지만, PM 는 최소 입력 및 출력 약 60도에서 최대 입력 및 출력 약 80도까지 일정하게 유지됨 --> 따라서 PM의 위상 여유가 입력과 출력에서 "constant and unchanged (일정하고 변함이 없었다)"는 것은 시스템이 매우 일관되고 안정적인 위상 응답을 보인다는 것을 나타냄
- 상단 그래프 (Open loop CG: Minimum and Maximum loop gains)
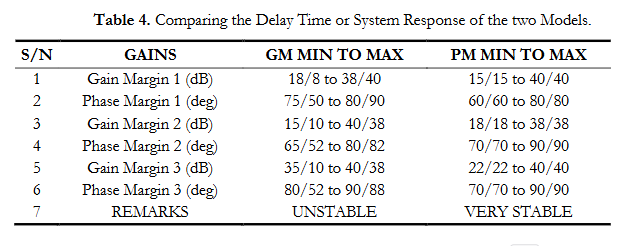
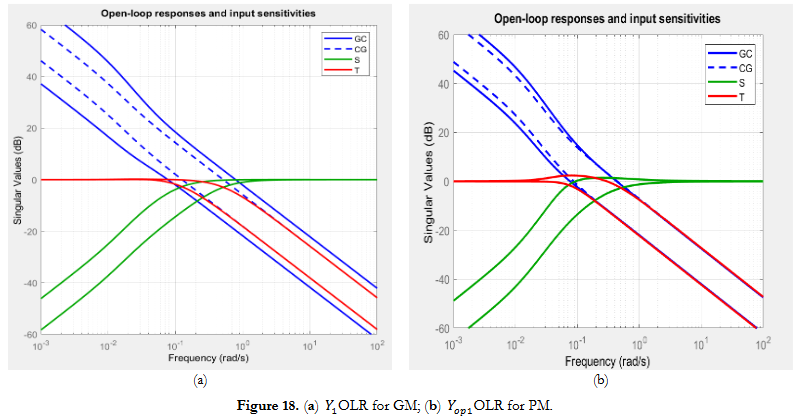
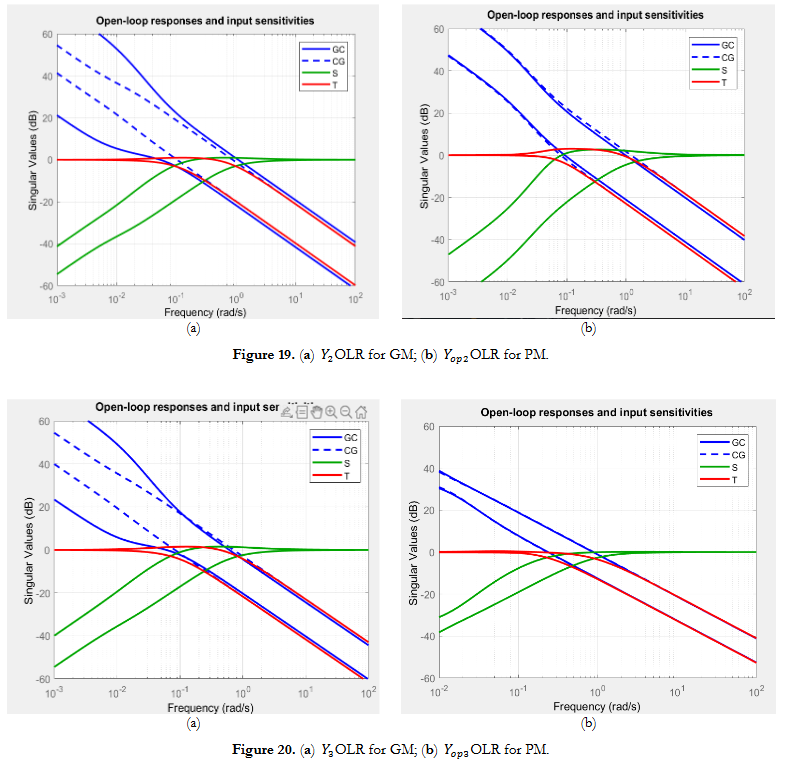
4.3.3. Open-Loop Response and Input Sensitivity Plots (OLR)
- 개루프 응답은 시스템의 제어 루프를 닫지 않은 상태에서 시스템의 동작을 평가하는 방법
- 여기서는 '특이값(singular values)'을 주파수에 대해 플로팅하여, 각 최적 이득 계수(optimal gain factor)가 목표 개루프 이득 곡선(target open-loop gain curve)에 얼마나 근접하는지 측정함. 즉, 시스템이 얼마나 정확하게 원하는 이득 특성을 따르는지를 보여줌
- Figure 18b (PM)가 18a (GM)보다 목표(target)에 더 잘 겹쳐지는 것을 보여줌
- Figure 19b (PM)는 19a (GM)에 비해 거의 완벽하게 목표에 겹쳐지는 반면, 19a는 목표에서 크게 벗어남
- Figure 20b (PM)는 20a (GM)에 비해 목표에 완전히, 그리고 완벽하게 겹쳐지는 것을 명확히 보여줌
- GM 플롯을 해당 PM 플롯과 비교하면 모든 PM 최적 이득 계수가 GM의 이득 계수보다 목표 이득 값 곡선에서 더 많이 겹침
- 따라서 PM은 높은 입력 감도로 더 나은 개방 루프 응답을 가짐을 의미
Conclusion
- gain factor를 최적화하기 위해 머신러닝 분류기를 사용하여 MIMO 시스템용 PID Controller를 모델링
