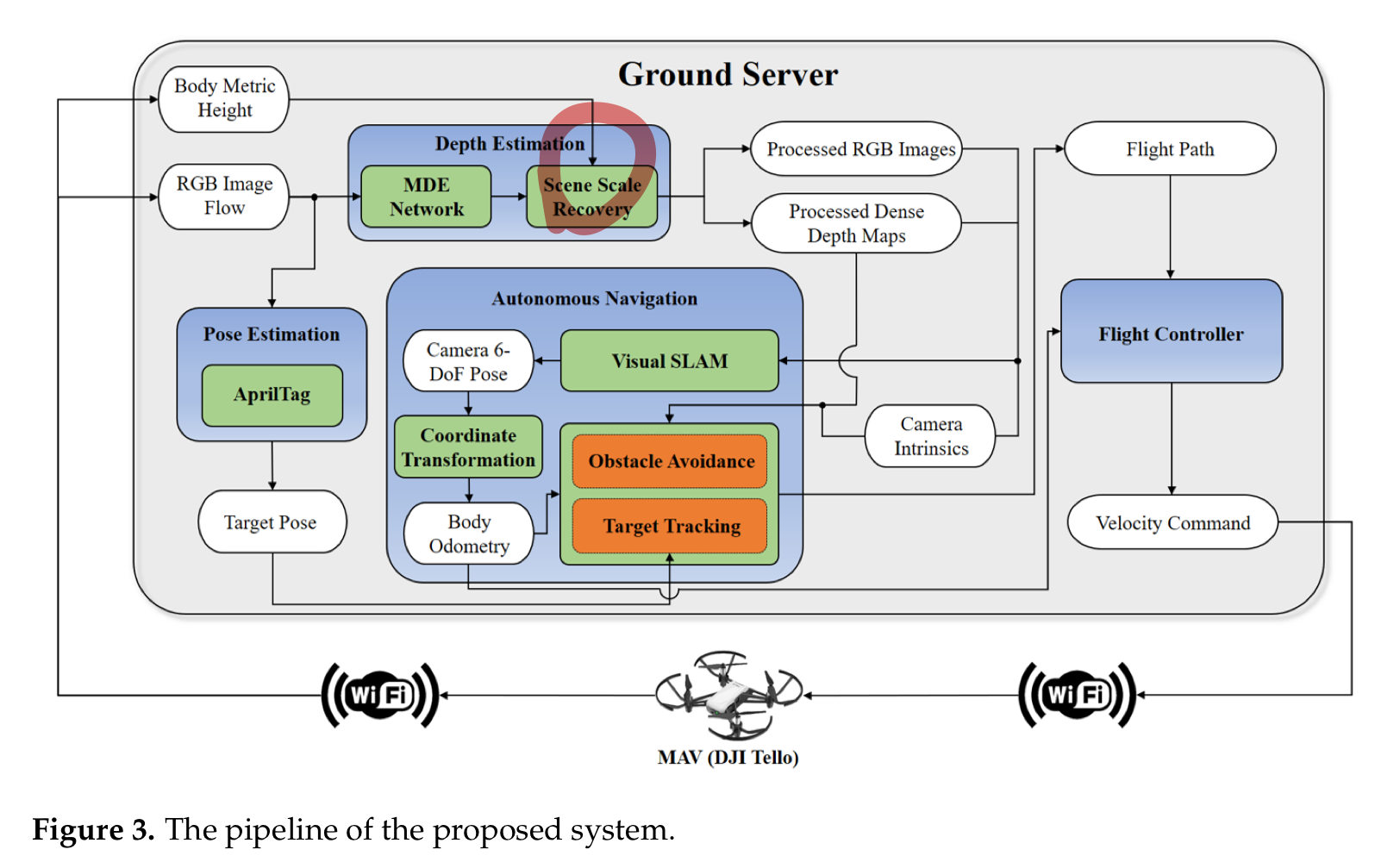
Environment의 크기를 재조정해주기 위한 scale factor를 계산하는 4-stage method를 제시한다.
- depth를 3D point cloud로 변환 (intrinsics 사용)
- 3D point cloud에서 ground segmentation 수행 (RANSAC 기반)
- point cloud transformation을 통해 모든 ground points의 world map(body frame)에서의 상대적 위치를 구하고, 그 z axis 좌표에 대한 평균을 냄
- ToF로 구한 gt height와 3번 과정을 통해 구한 height를 가지고 scale factor 계산
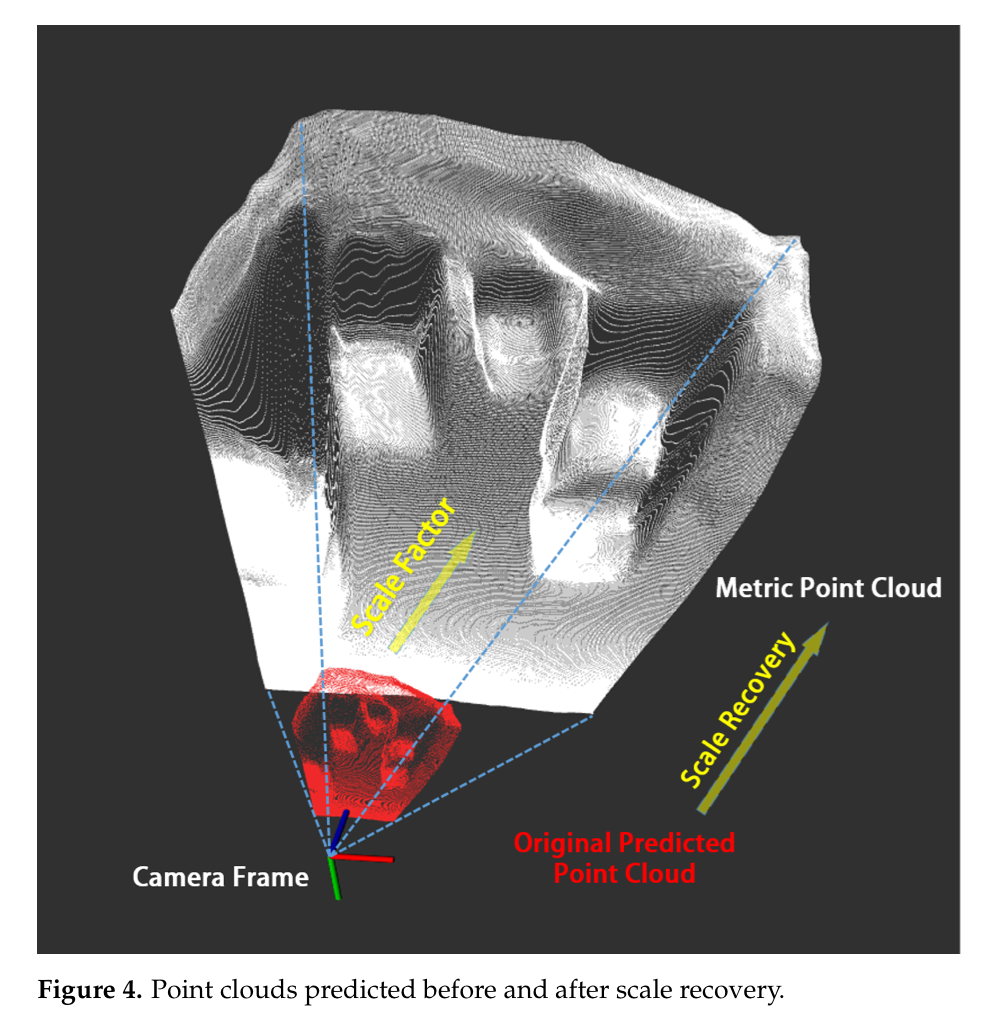

미다스 3D로 lift한 결과가 이렇게 안 좋은 건 그저 depth estimation 모델의 성능 차이인가?
ToF로 구한 gt height를 필요로 하는구나. 슬램 돌린 결과랑 베이스라인이랑 방 크기가 너무 차이나서 해결 방법 찾아보고 있는데 그냥 estimated depth의 inaccuracy 때문인가?

Hail hamster