- 앤드류 응 Deep Learning Specialization의 강의 1
- 구글 MLB DLS 미션1
강의 자막 참고 :
- 한국어 자막이 제공되지만, 안보느니만 못합니다.
- 영어 자막이 제공됩니다. 한국어 자막보다는 낫지만, 오타가 정말 많습니다.
- 잘못하면 터미놀로지 자체를 잘못 배웁니다.
- 그러니 자막없이 그냥 영어듣기평가 하듯이 수강하시는 것이 가장 현명합니다.
- 자막이 그닥 쓸모가 없습니다.
Introduction to Deep Learning
가장 단순한 뉴럴 네트워크
- Standard NN
- 뉴런은 입력을 받고 출력을 뱉는다.
- 뉴런을 쌓으면 레이어가 된다.
- 레이어가 모이면 뉴럴네트워크(NN, 인공신경망)으로 부른다.
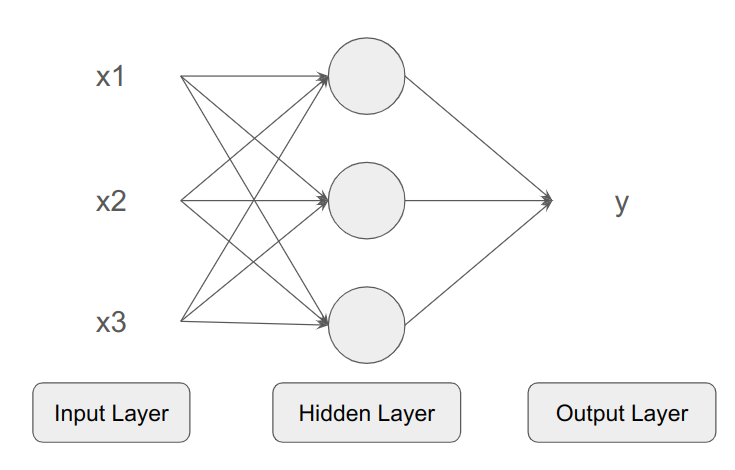
- input, hidden, output 레이어
아래 뉴럴네트워크는 은닉층의 각 뉴런이 모든 x(feature)로부터 입력을 받는다.
- 사람이 특정 노드에 적합한 x를 고르지 않는다.
- 뉴럴네트워크가 적절한 x를 골라 적절한 출력을 내도록 맡긴다.
- 트레이닛 셋(x to y)을 주면, x로부터 y로의 매핑을 한다.
Supervised Learning
Input(x), Output(y) 데이터를 주고 훈련시킨다. 일반적인 예를 들면
- Standard NN : 온라인광고
- Convolutional NN (CNN) : Image
- Recurrent NN (RNN) : 음성인식, 기계번역 (시간 등 순서가 있는 것들)
데이터는 두 가지로 분류한다
- Structured Data : 일반적인 테이블 DB
- Unstructured Data : 오디오, 이미지, 텍스트
딥러닝은 왜 잘나가나
머신러닝의 구현 방법에 따라, 라벨링된 데이터의 양에 따른 성능이 다르다.
- 데이터셋이 작은 경우 SEM이 나을 수 있다. 개발자 스킬의 영향이 크다.
- 규모가 딥러닝의 발전을 견인한다.
딥러닝이 이제와서 잘나가는 이유로 세 가지를 꼽는다면
- Data : 더 대규모의 데이터
- Computation : 연산이 빠를 수록 Idea-Code-Experiment 사이클을 빨리 돌릴 수 있음
- Algorithms : 연산 성능을 올릴 수 있음 (e.g., sigmoid to ReLU)
- ReLU (Rectified Linear Unit) :
max(0, x)인 함수
- ReLU (Rectified Linear Unit) :
약자는
- m : 데이터셋 크기 (traing examples의 수)

Logistic Regression as a NN
Neural Network Basics - part 1 of 2
Binary Classification
Logistic Regression은 Binary Classification을 위한 알고리즘
입력을 받아 0, 1 중 한 개 출력
- e.g., 이미지 입력받아서 0(고양이 아님), 1(고양이 맞음) 출력
Binary Classification을 위한 Notation
- : x ()의 차원 (=한 입력 단위는 몇 개의 피쳐가 모여 구성되느냐?)
- e.g.,
4X4 rgb이미지의
- e.g.,
- m : 데이터셋의 수
- m training examples
- : train example의 수
- : test example의 수
- 입력 벡터
X.shape = (n_x, m)- 열(col) 방향 = () : 다른 입력x의 나열
- 행(row) 방향 = () : 같은 입력x의 각 피쳐 나열
- 다른 사람들은 대신 의 형태로 입력을 넣기도 함.
- 출력 벡터
Y.shape = (1, m)
Logistic Regression Model
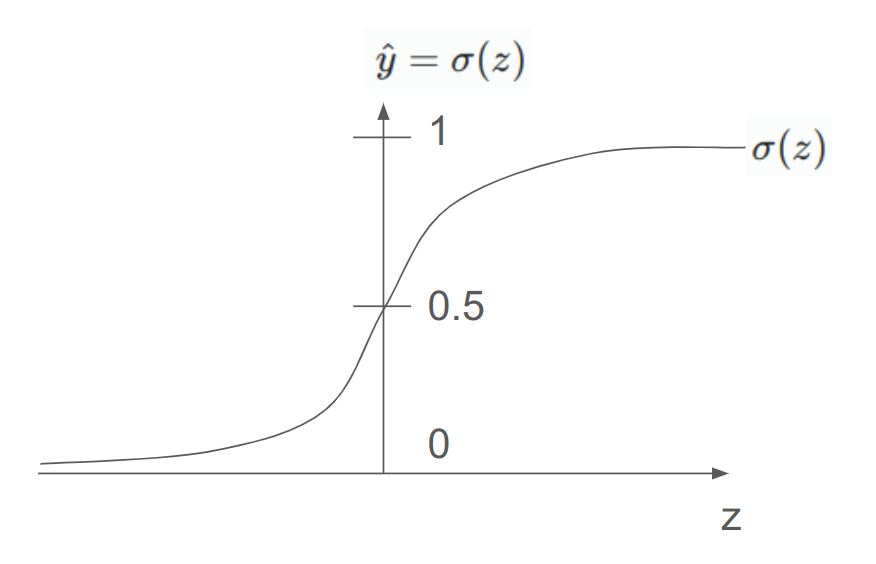
은 Sigmoid함수를 쓴다
- 입력 에 대해서
- 0~1 사이의 출력 를 낸다.
구하려는 출력값이 무엇인지부터 정의하자.
은 주어진 입력 에 대해 예측된 출력 (ground truth).
을 구하고 싶다.
- 입력x가 주어졌을 때 예측된 출력 가 1일 확률
- 즉,
로지스틱 리그레션의 파라미터는 2개
여기서 라고 하면
- When ,
- When ,
w와 b를 구하기 위해 이제 cost function이 필요해진다.
Logistic Regressioin Cost Function
Loss(error) function :
- 한 개 example에 대한 실제 정답()과 예측치()의 오차를 계산하는 함수.
- 작을 수록 좋음. 오차가 적다는 말이니까.
- 이게 왜 맞음?
- y=1 넣으면 이 1에 가까워질 수록 손실함수 값 작아짐
- y=0 넣으면 이 0에 가까워질 수록 손실함수 값 작아짐
Cost function : 전체 트레이닝 example들에 대한 오차를 계산
이제 이 Cost function을 이용해서 학습을 진행한다.
- 다시 말하면, Cost function 를 가능한 작게 만드는 와 를 찾는다.
- 그 알고리즘의 이름이 Gradient Descent다.
convex, non-convex 함수
함수가 하나의 minimum을 갖는 경우 convex function이라고 한다.
여러개의 minimun (local optimal)을 갖는 경우 non-convex function이라고 한다.
위에서 Logostic Regression에 대해 정의한 Cost function 는 convex하다.
Gradient Descent 알고리즘 (경사하강법)
로지스틱 리그레션의 cost function이 convex function이므로 Gradient Descent로 최적의 W, b를 찾아볼 수 있다.
여러 번의 이터레이션을 돌면서 (step을 밟으면서)
- 가장 가파른 하강 방향으로 내려간다. (try to take a step downhill in the direction of steepest descent as quickly as possible)
- 내려간다는 것은, w와 b값을 새로이 업데이트 하는 것이다.
- 결국에는 minimum(혹은 근접한 점)을 찾는다.
업데이트 하는 것을 수식으로 표현하면 아래와 같다.
- 빼는 값을 라고 표기하자.
- alpha는 step을 얼마나 빠르게 밟을 것인지를 결정
w와 b는 아래 back propagation을 통해 얻는다.
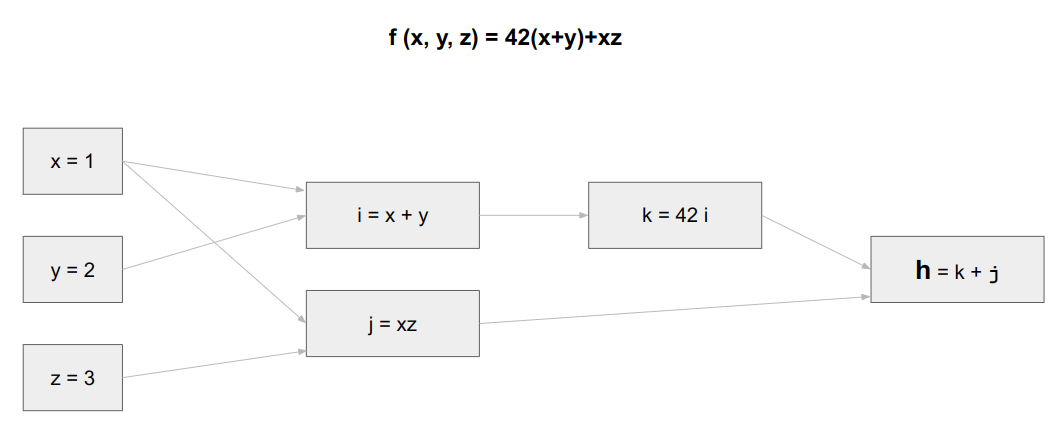
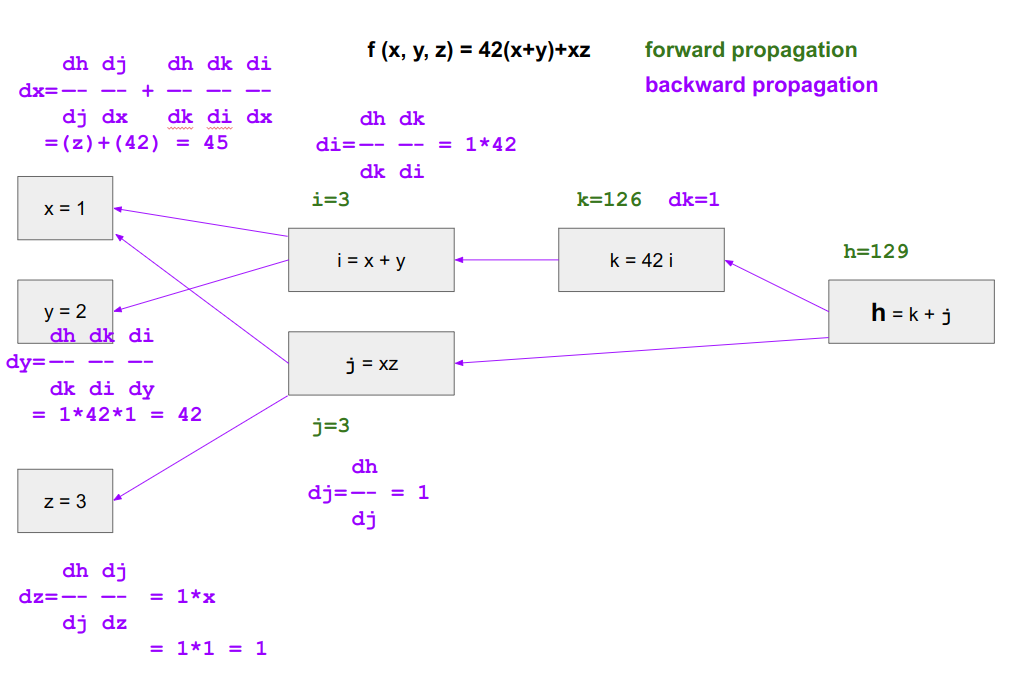
computation graph
뉴럴네트워크의 컴퓨테이션은 forward propagation, back(ward) propagation으로 구성
computation graph는 왜 그렇게 구성되어있는지 설명함.
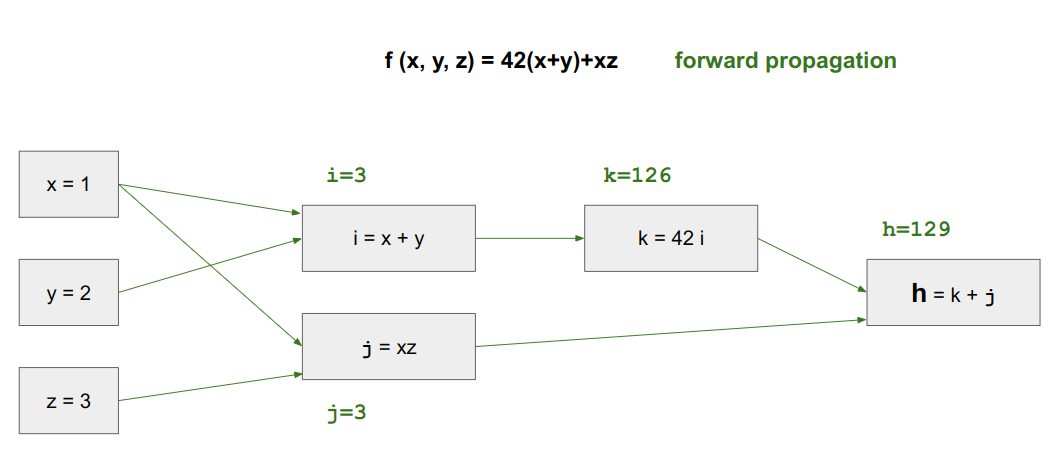
forward propagation은 단계적으로 변수를 계산하고, 결국에는 최종 변수를 계산
back propagation은 거꾸로 단계를 거슬러가며 각 변수의 최종변수에 대한 미분을 계산
참고 : computational graphs in deep learning - geeksforgeeks
약속
는 var 라고 표현하자.
최적화하기를 원하는 최종 변수가 J이고 a로 미분한 결과를 알고 싶다면 a라고 한다.
계산 전 함수 f, 변수 x~z, a~d 정의
forward pass (propagation).
backward pass (progagation)
- 복잡해 보이지만 그냥 체인룰 덕지덕지다.
로지스틱 리그레션의 로스함수로 w, b를 최적화 할 때에도 위와 같은 과정을 따른다.
- 로스값을 구한다. (forward)
- 로스값이 나왔으면 입력 w, b방향으로 미분을 한다. (back)
- 미분된 값을 기존의 w, b에서 뺀다. (update)
- 그 상태가 w, b가 한 step을 밟아 업데이트 된 것이다.
cost함수로 모든 트레이닝 examples에 대해 w, b를 최적화 할때도 마찬가지다.
그냥 여러 번 할 뿐이다.
- training exmaple이 m개, 피쳐가 2개라면 ( x1, x2 )
- 학습의 한 싸이클은 아래와 같다. 이걸 많이 돌려서 w, b를 최적화한다.
- (=loss function값이 작아지게 한다.)
--------------------------------
J, dw1, dw2, db <- 초기값 할당
function 한_싸이클_학습() {
for i=0 -> m
// loss function 값을 구한다
z^i = Tranpose(W) * x^i + b
a^i = Sigmoid(z^i)
J += Loss(a^i, y^i) // 이거 누적하는 애들은 for문 끝나고 m으로 평균냄
// 열심히 미분을 한다.
dz^i = a^i - y^i
dw1 += x1^i * dz^i
dw2 += x2^i * dz^i
db += dz^i
// 이제 w, b 업데이트 해야되니까, 구한 미분값들 평균 내기
J /= m
dw1 /= m
dw2 /= m
db /= m
// 파라미터 w, b 업데이트하기
w1 -= α * dw1
w2 -= α * dw2
b -= α * db
}Python Vectorization
Neural Network Basics - part 2 of 2
왜함?
명시적인 loop를 줄여야 한다.
연산은 벡터로 하는게 빠르다. 벡터를 쓰자.
numpy built-in function같은걸로 for-loop를 없앨 수 있으면 반드시 없애라.
import numpy as np
u = np.array([1,2,3])
np.random.rand(cnt)
np.exp(v)
np.log(v)
np.abs(v)
np.maximum(v, 0)
u.sum(axis=0)
u.reshape(1,3)
u**2
u/=4Vectorizing Logistic Regression
피쳐는 매트릭스에 박는다
- 한 입력의 피쳐 다 쓰면 눈아프다.
- 대충 라고 쓰자.
파라미터도 매트릭스에 박는다.
- : 열벡터.
- : 행벡터
그럼 모든 training example에 대해 를 구해보자
- W, X, b가 다 매트릭스니까, 그대로 z값도 매트릭스에 편안히 박는다.
- 코드로 쓰면
Z = np.dot(w.T, X) + b: b는 dot()결과에 맞춰 알아서 늘어난다. (브로드캐스팅)
모든 training example에 대한 예측치 를 구하면
Vectorizing Logistic Regression's Gradient Output
dz, dw, db가 모두 매트릭스라고 하자
- (
np.sum(dz))
Numpy
(m,n) (1,n) --> (1,n)벡터가 복사돼서 (m,n)에 적합하게 바뀜.
연산마다 바뀌는게 좀 다름
(m,n) + R 처럼 숫자를 더하면 그대로 모든 원소에 다 더해버림.
shape 주의
- shape가
(m,)인 경우, 열벡터도 행벡터도 아닌 1-rank array라고 한다.- Tranpose하면 달라지는게 없다.
(m,1)은 컬럼벡터가 맞다.(1,n)은 로우벡터가 맞다.- 트랜스포즈하면 쉐이프 바뀐다.
- 1-rank array쓰면 버그나기 쉬우니까 쓰지마라.
- assert(a.shape == (m,1))처럼 아예 싹을 잘라버려라.
Shallow Neural Networks
뉴럴네트워크가 무엇인가
뉴럴네트워크는 레이어가 여러개다.
레이어는 stacks of units이다.
a (액티베이션) 값과 w, b를 표기할 때, 몇 번(i-th)레이어에 속하는지 superscript bracket으로 표기한다.
- input layer (1st)에 속하는 input vector =
- hidden layer (2nd)에 속하는 activations, W, b --> , , ,
- output layer (3rd)에 속하는 activaion =
위의 경우는 총 3개 층으로 구성되어있다.
- 인풋레이어 빼고 2개만 세서, 2-layer NN 이라고 부른다.
각 레이어는 모두 액티베이션을 가진다.
- 인풋레이어의 각 인풋피쳐도 액티베이션으로 생각한다. 히든레이어로 값을 패스하는 역할
- 히든레이어는 아웃풋 유닛으로 넘길 값을 계산
- 아웃풋레이어는 최종 값 ()을 계산
Computing a NN's Output
로지스틱 회귀의 cost를 계산하는 뉴럴네트워크를 만든다고 하자.
2주차에서 만들었던 로지스틱 회귀 모델은 사실상 레이어가 하나였다.
그러니 W, B도 한 레이어에 대해서만 하나씩 있었고, 시그마 계산도 한 레이어에서 한 번 했다.
아래는 히든 레이어에서 한 번, 아웃풋레이어에서 한 번 --> 도합 두 번을 한다.
= week2에서 한 번 하던걸 그냥 연이어서 두 번 하는거다.
, (hidden layer의 unit 개수) = 4 라고 가정하자
그 상태에서 단일 example에 대해, 여러 개의 examples에 대해 각각 NN 아웃풋을 뽑아보자.
m=1인 경우 (training example 하나에 대해서)
W 트랜스포즈는 알아서 했다고 생각을 하자. 그리고
임.
- : shape는 (4,1) = (4,3)(3,1) + (4,1)
- 4는 히든레이어 유닛의 개수 . 각 유닛별로 출력 z를 하나씩 뱉음.
- : shape는 (4,1) = (4,1)
- : shape는 (1,1) = (1,4)(4,1) + (1,1)
- : shape는 (1,1) = (1,1)
m>1인 경우 (training example 여러 개)
W 트랜스포즈는 알아서 했다고 생각을 하자. 그리고
- : shape는 (4,m) = (4,3)(3,m) + (4,m)
- : shape는 (4,m) = (4,m)
- : shape는 (1,m) = (1,4)(4,m) + (1,m)
- : shape는 (1,m) = (1,m)
헷갈리니까 각 매트릭스를 펼쳐서 살펴보면
- 각 열 : i-th examples
- 각 행 : i-th exmaple의 features
- 각 열 : i-th examples에 대한 z
- 각 행 : i-th unit (몇 번째 유닛이 뱉은, i-th example의 z임?)
Activation funcions
유명한 활성화 함수는 무엇이 있나
sigmoid, tanh, ReLU, Leaky ReLU
sigmoid에 대해서
- sigmoid는 binary classification할 때 output layer의 활성함수로 주로 사용
- 웬만하면 쓰지마라. 차라리 tanh를 쓰든지, ReLU를 쓰자.
- sigmoid보다는 tanh가 더 낫다. 평균이 0으로 찍혀서 편하고, 범위도 더 넓다.
위에서 살펴본 네 함수는 모두 비선형함수다. (선형함수가 아니니까)
비선형 활성함수가 왜 필요한가?
선형함수는 아쉽게도 태생적으로 선형적이라는, 단순하다는 문제가 있다.
- 선형 활성화 함수 를 쓴다면, activation값 a는 가 된다.
- 선형함수로 뭔짓을 해도 결국 신경망은 언제나 선형함수 결과만 뱉는다.
- 신경망 10억개가 백날 선형값 뱉어봤자, 결국에는 모든 결합은 선형결합이다.
- 히든레이어의 의미가 없다. GPU 먹고 뱉는게 단순한 선형결합이라니.
비선형함수는 선형공간을 벗어나 비선형 공간을 사용한다.
- 신경망이 복잡한 데이터 패턴을 학습할 수 있게 됨
- 비로소 보다 쓸모있는 모델이 탄생
그러나 선형함수가 언제나 쓸모없지는 않다. 특별한 경우 쓸 수도 있다.
- y가 real number인 경우, 아웃풋레이어에 선형 활성화 함수를 사용할 수 있다.
- 그러나 히든레이어에는 비선형함수를 쓰는 것이 좋다.
Derivatives of Activation Functions
가정 :
- 가로축은 z
- 세로축은 활성화함수 값
Sigmoid Function
Tanh Function
ReLU Function
Leaky ReLU Function
Gradient Descent for Neural Networks
1개 히든 레이어를 갖는 뉴럴네트워크에서 gradient descent를 구현한다.
이미 본 대로 파라미터는 아래와 같다
Forward, Back Propagation, Gradient Descent를 위한 공식은 아래와 같다.
Forward Propagation
Backpropagation
Gradient Descent Updates
Random Initialization
행렬 의 원소를 전부 0으로 초기화 한다면?
- 히든레이어의 모든 유닛이 같은 함수만 계산, 뉴럴네트워크 학습 제대로 안됨
- symmetry breaking problem
그래서 의 원소는 0이 아닌 충분히 작은 값으로 초기화해야 한다.
np.random.randn(유닛 갯수, 피쳐 갯수) * 0.010.01은 작은 값을 만들기 위한 임의의 상수. 뭐든 적절한걸로 넣으면 됨.
- 큰값으로 하면 왜 안됨? : 활성화함수가 포화상태(saturation)가 됨 -> 기울기 작아님 -> 학습 느려짐
- 함수의 포화 : 입력값이 변해도 함수값이 변하지 않는 것 (양끝 미분값이 0으로 포화)
Deep Neural Networks
Deep L-layer NN
딥 뉴럴 네트워크의 깊이는 모델이 학습가능한 복잡도와 연관있음
그러나 어느정도의 깊이가 문제해결에 적절한지 미리 알 수 없고, 경험적으로 결정해야 함.
Cross Validation Data, Development Set으로 평가.
레이어 노테이션
- (소문자 L) : 레이어 번호 (몇 번째?
- : 마지막 레이어 번호 (L-layer NN)
일반화된 forward propagation 식
일반화된 식은 (에 대해서)
각 매트릭스의 차원계산을 잘 못하면 인생이 슬퍼질 수 있다.
- -- numpy가 알아서 broadcasting
back propagation
일반화하면
맨 처음과 끝을 살펴보면
Why Deep Representation
딥 뉴럴네트워크는 단순한 특징학습에서 시작. 뒷 레이어로 넘어가면서 앞단의 학습내용을 조합하고 더욱 복잡한 내용을 학습. 단계적으로 복잡도를 높이면서 학습.
Hierarchical Feature Learning
= Simple to Complex Representations
- Early Layers : 단순한 특징 학습. 기본적이지만 중요한 것들.
- Intermediate Layers : 단순한 특징을 결함, 더 복잡한 구조 형성
- Deep Layers : 더더더 복잡한 패턴 인식
Circuit Theory : 논리게이트로 계산하는 함수는 shallow NN보다 Deep NN이 더 잘한다.
- Shallow하면 유닛이 지수적으로 늘어나는데, Deep하면 로그수준임.
Building Blocks of DeepNN
이제껏 살펴본대로 딥뉴럴네트워크 구현은 아래 내용을 포함한다.
- Forward Propagation
- Back Propagation + update(Gradient Descent)
- 그리고 위 두 가지의 반복 (Training Iteration)
Forward Propagation
- 입력 :
- 출력 :
- cache에 값을 저장하고, back propagation때 사용.
Back Propagation + Gradient Descent
- 입력 :
- 출력 :
- cache에 뽑아서 저장. 레이어 의 Gradient Descent에 활용
Parameters vs Hyperparameters
(모델) 파라미터 : W, b
하이퍼파라미터 : 사람의 선택이 필요. 학습 알고리즘을 제어하는 파라미터.
- e.g., learning rate , 히든레이어 개수 , 유닛의 수, 활성화 함수 종류
- 하이퍼파라미터는 모델파라미터의 최종 값 결정
하이퍼파라미터는 경험적으로, 직관에 따라 결정한다.
해결하려고 하는 문제, 데이터의 성격, 컴퓨팅 인프라에 따라 최적 하이퍼파라미터가 달라질 수 있음. 따라서 주기적으로 하이퍼파라미터를 재조정하고 모델을 최적화해야 함.
딥러닝의 강점
딥 러닝은 매우 유연하고 복잡한 함수를 학습하는 데 강점 있음
주어진 입력 X에 대해 출력 Y를 예측하는 Supervised Learning에서 매우 효과적
그래서 딥러닝이 뇌와 무슨 관련이 있는가
딱히 없다.
