YDLidar
공식 홈페이지 : https://www.ydlidar.com/
공식 github : https://github.com/YDLIDAR/YDLidar-SDK
사용한 LiDAR 버전은 X4-Pro
윈도우에서는 build가 너무 힘들어서 WSL을 사용
USB 포트 연결
- WSL 20.04 설치 및 등록
- VSCode에서 연결
- Powershell 관리자 모드로 열기
- win-usbipd 설치^[https://github.com/dorssel/usbipd-win]
winget install usbipd- 설치가 완료되면 Powershell 관리자 모드로 새로 창 열고 기존 창은 닫기
- usb 포트 확인하기
usbipd list- 연결할 포트 번호 확인해서 공유로 변경
usbipd bind --busid 3-2- 공유가 가능한 포트 wsl에 연결
usbipd attach --wsl --busid 3-2- 다시 WSL로 돌아가서 확인해보기
lsusbCmake 세팅
sudo apt update && sudo apt upgrade -y
sudo apt install git cmake g++ build--essential swigPython 세팅
sudo apt install python3-pipYDLidar 설치
cd ~
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
cd ~/YDLidar-SDK
mkdir build
cd build
cmake ..
make
sudo make install
cd ~/YDLidar-SDK
sudo python3 setup.py install추가 정보
YDLiDAR의 SDK API for Developers를 확인하면 파라미터 테이블이 있다.
하지만 여기에는 X4-Pro의 파라미터가 없어 사용할 수 없었다.
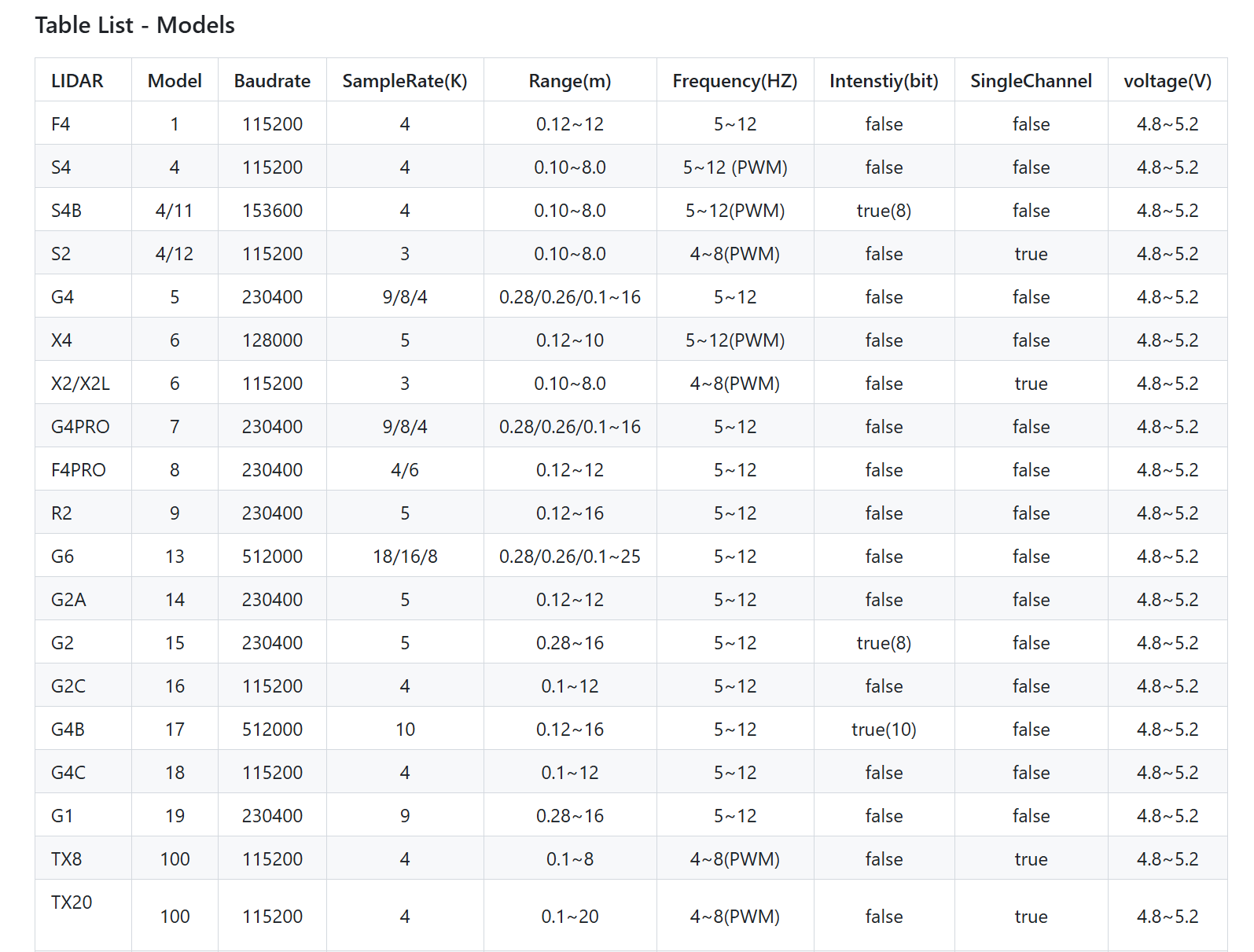
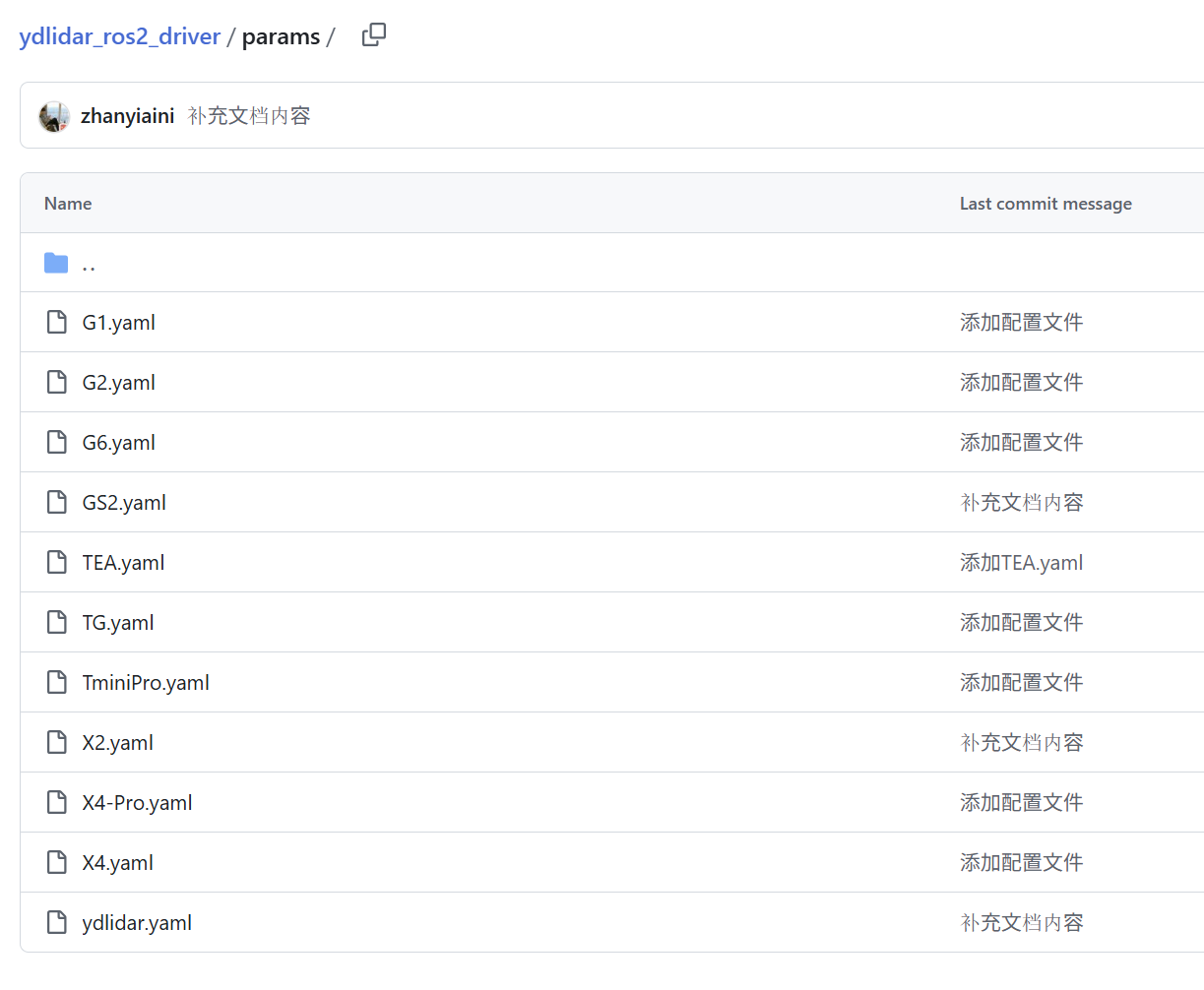
이를 해결하기 위해 깃허브를 탐색했고, 그 결과 YDLiDAR ROS2에서 힌트를 얻을 수 있었다.
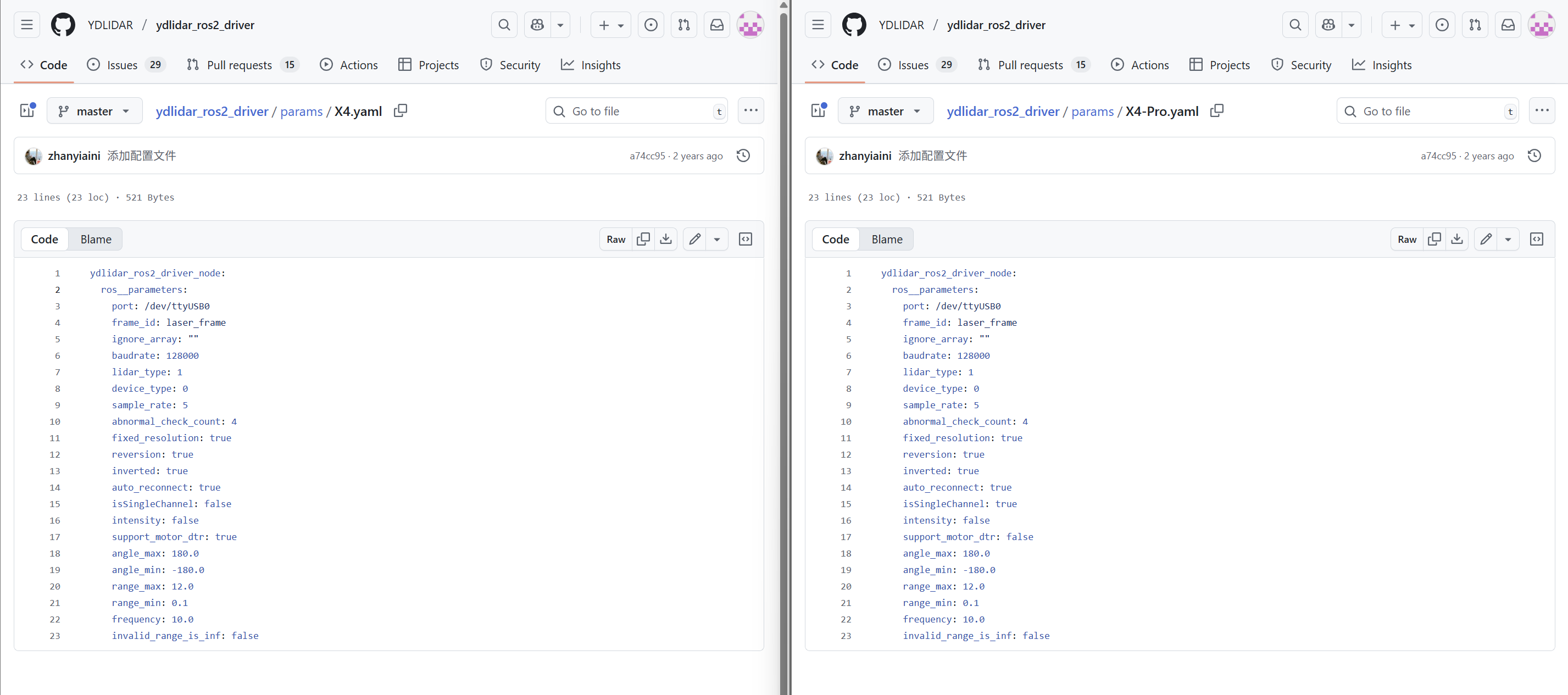
X4와의 차이점은 isSingleChannel과 support_motor_dtr 였고 이를
dir(ydlidar)를 통해 유사한 함수를 찾았고, 해당 파라미터 옵션을 세팅하니 동작하여 X4-Pro를 사용할 수 있었다.

커피를 넣으면 코드가 나옵니다.