본격적으로 Diffusion Paper 을 읽기전에
https://www.youtube.com/watch?v=uFoGaIVHfoE&t=4455s 를 보고
Diffusion 에 대해서 공부하였다
1 DDPM ( Denoising Diffusion Probabilistic Model )
Physical Intuition

-
Diffusion 의 사전적 의미 - 확산 : 액체나 기체에 다른 물질이 섞이고, 그것이 조금 씩 번져가 마지막에는 일률적인 농도로 바뀌는 현상
-
연기의 밀도를 알아내는 것은 어려우나, 시간이 지나면 고르게 분포되어 uniform 해질것임 -> 딥러닝에서 uniform 에서 시작해서 다시 처음 상태로 되돌릴 수 있음
-
작은 sequence 에서의 확산은 forward와 reverse 모두 gaussaion 분포 안에서 다음 위치가 결정된다고 가정함
Denoising Diffusion Models
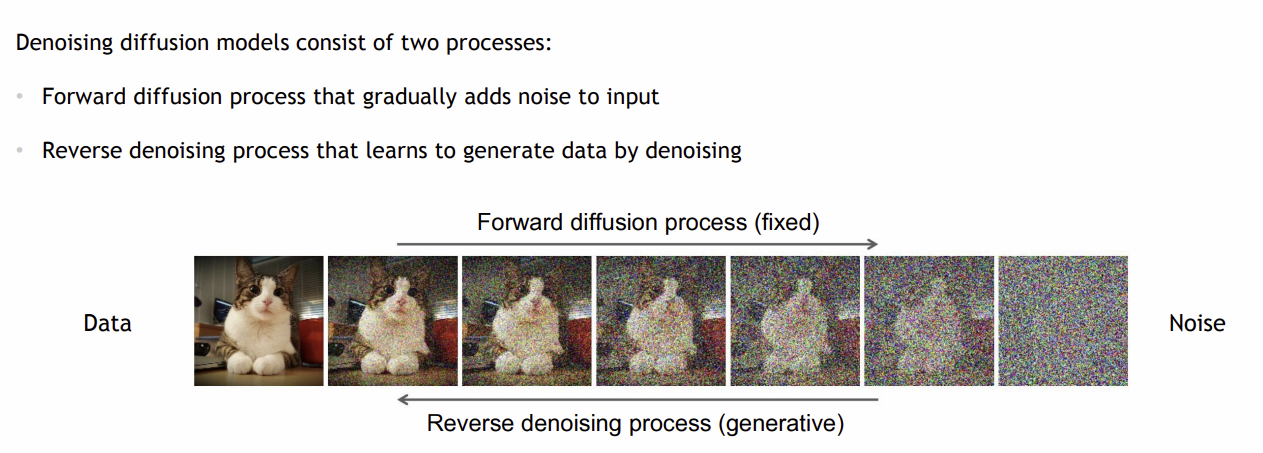 -> 이미지에 noise 를 더해서 gaussaian noise map을 만들고,
-> 이미지에 noise 를 더해서 gaussaian noise map을 만들고,
noise에서 reverse denoising process 를 거쳐서, 이미지를 생성하는 과정
noise 에서 이미지를 생성하는 과정을 training 하는 것을 Diffusion Model 이라함
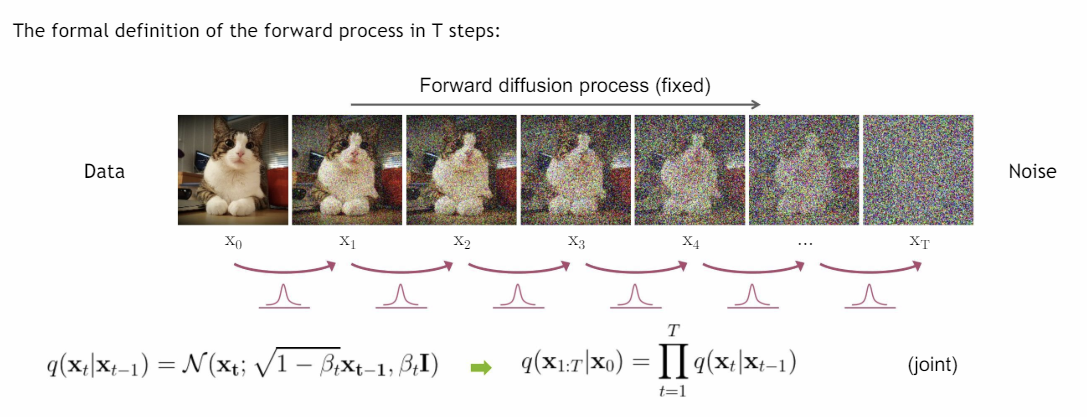
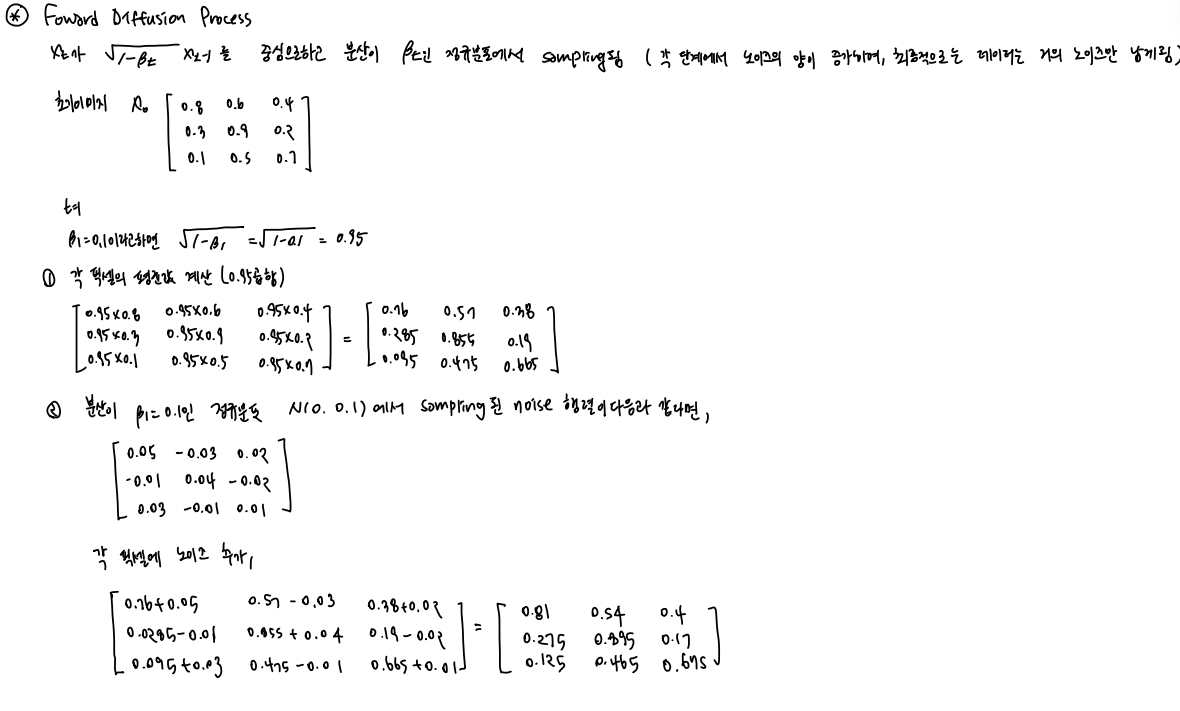
Foward Diffusion Process (q)
-
variance schedule 값을 이용하여 data에 약간의 noise를 추가하고 가 를 중심으로 하고 분산이 인 정규 분포에서 샘플링됨
-
단계별로 점진적으로 진행되며 각 단계에서 노이즈의 양이 증가하여, 최종적으로는 데이터는 거의 노이즈만 남게 됨
-
Foward Diffusion Process의 전체 과정은 모든 단계에서의 조건부 확률의 곱으로 표현되며, 각 단계는 독립적으로 진행되고, 이전 단계의 data noise 를 추가하여 다음 단계를 생성함
Diffusion Kernel
- t번의 sampling 을 통해 매 step 을 거쳐가면서 진행하지않고, 에서 를 한번에 진행할 수도 있음
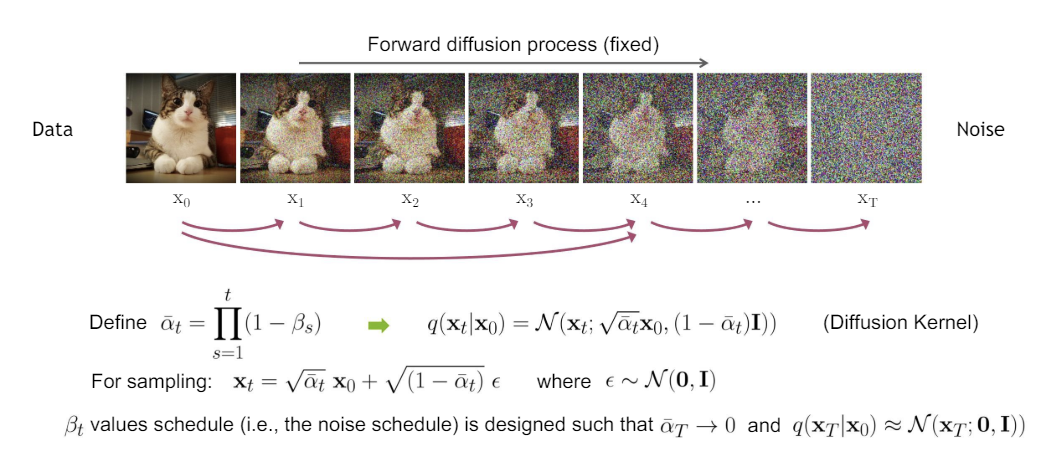
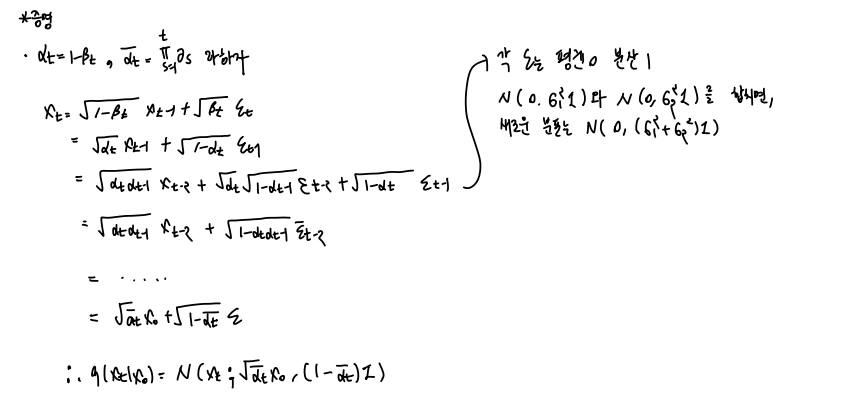
- 를 이용하여 에서 를 만드는 과정을 한번에 sampling 할수 있음
Reverse Diffusion Process (p)
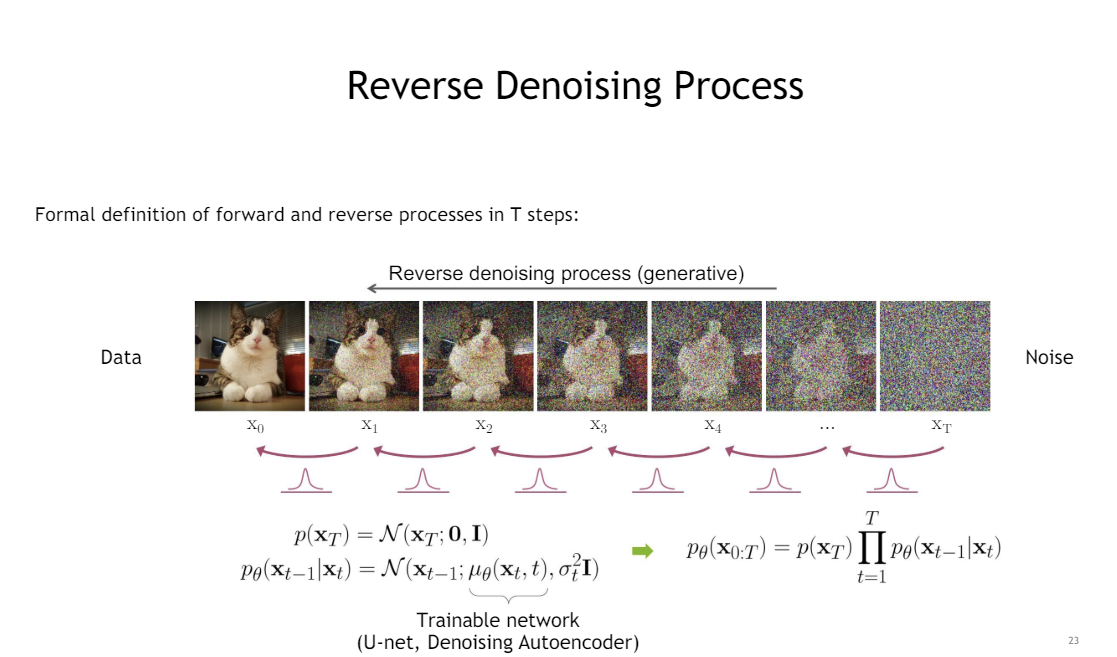
- 학습 가능한 네트워크 ( U-net, Denoising Autoencoder)로 평균된 학습과 고정된 분산을 이용하여 foward pass 를 수행한다
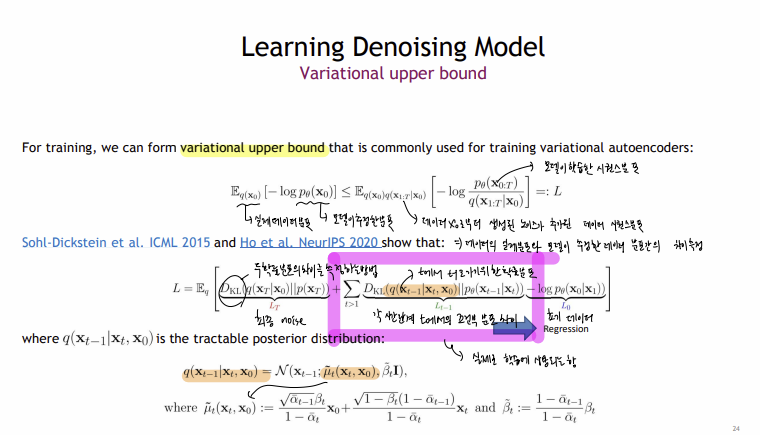
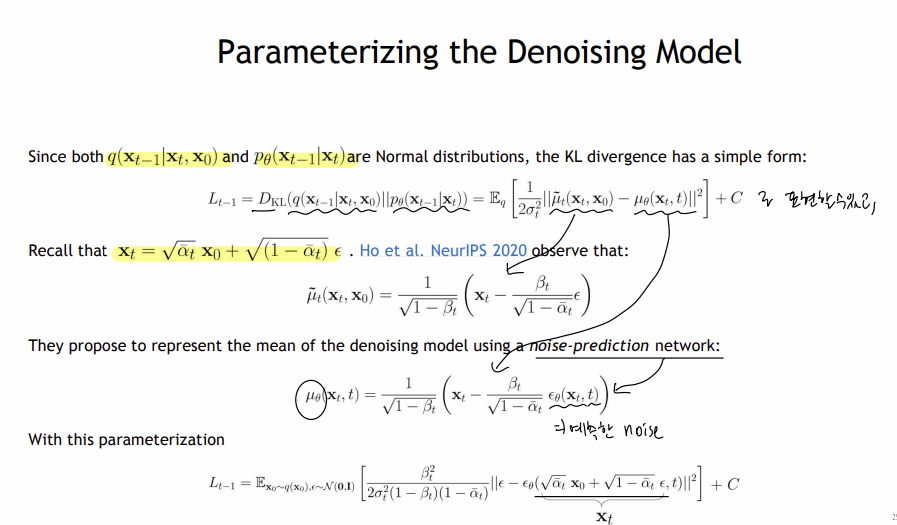
Learning Denoising Model ( Variational Upper Model )
Summary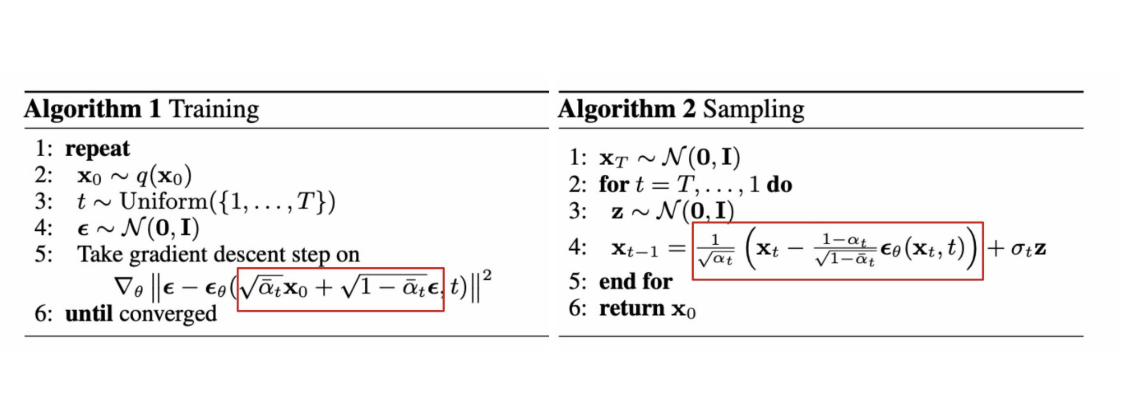
Algorithm1 : Training
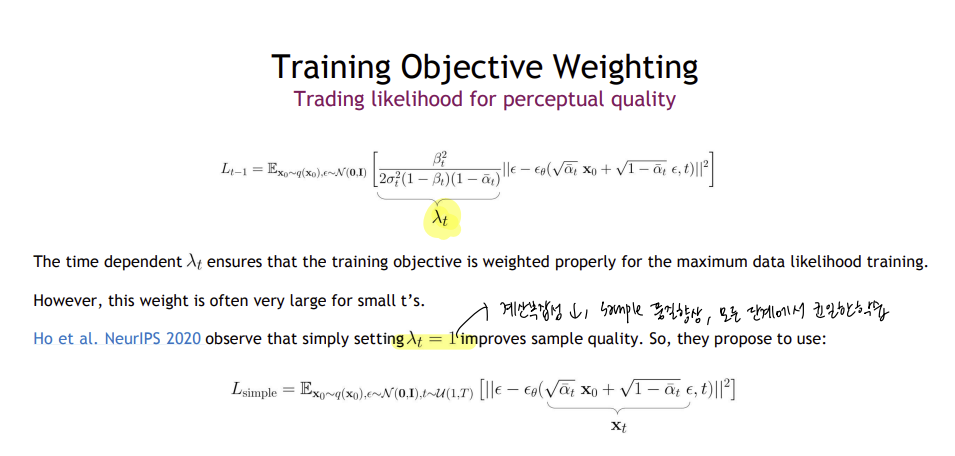
실제 데이터에 노이즈를 추가하여 노이즈가 포함된 데이터를 생성하고 , 모델이 예측한 노이즈와 실제 노이즈 간의 차이를 최소화 하는 파라미터를 업데이트함
Algorithm2 : Sampling
초기 노이즈 상태에서 시작하여, 모든 시간 단계에서 반복하면서,
현재 상태에서 예측된 노이즈를 제거하고, 모델의 불확실성과 다양한 샘플을 생성하기 위해서 노이즈를 추가하여 초기상태 xo을 반환함
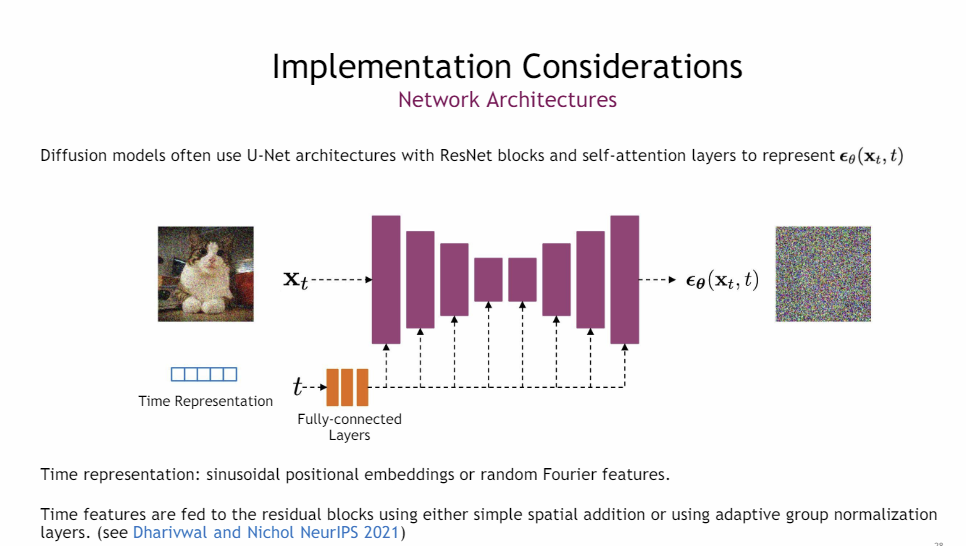
- 현재 시간 단계 t 에서의 이미지와 현재 시간단계를 나타내는 값을 U-NET 구조에 넣어줌
- 출력값으로 시간 단계 t에 대해 예측된 노이즈를 출력하고 이를 사용하여 를 생성함
- 최종적으로 을 얻으며, 이는 노이즈가 제거된 원래 이미지임
2 DDIM ( Denoising diifusion implicit models )
DDPM 에서는 Markovian Process 라서 이미지 생성까지 많은 step 을 거쳐야하기 때문에 시간이 많이 걸려 non-Markovian Process 를 도입한 DDIM 을 제안함
- Markovian Process : 현재 상태가 바로 이전 상태에민 의존하며( 는 로부터 결정 ) , 각 step 마다 현재 상태에서 다음 상태로의 전환이 이루어짐
- Non-Markovian Process : 현재 상태가 여러 이전의 상태의 영향을 미칠 수 있음( 와 을 같이 이용해서 을 결정 ) , 중간단계를 생략하고 여러 이전 상태들을 이용해 직접적으로 예측 가능
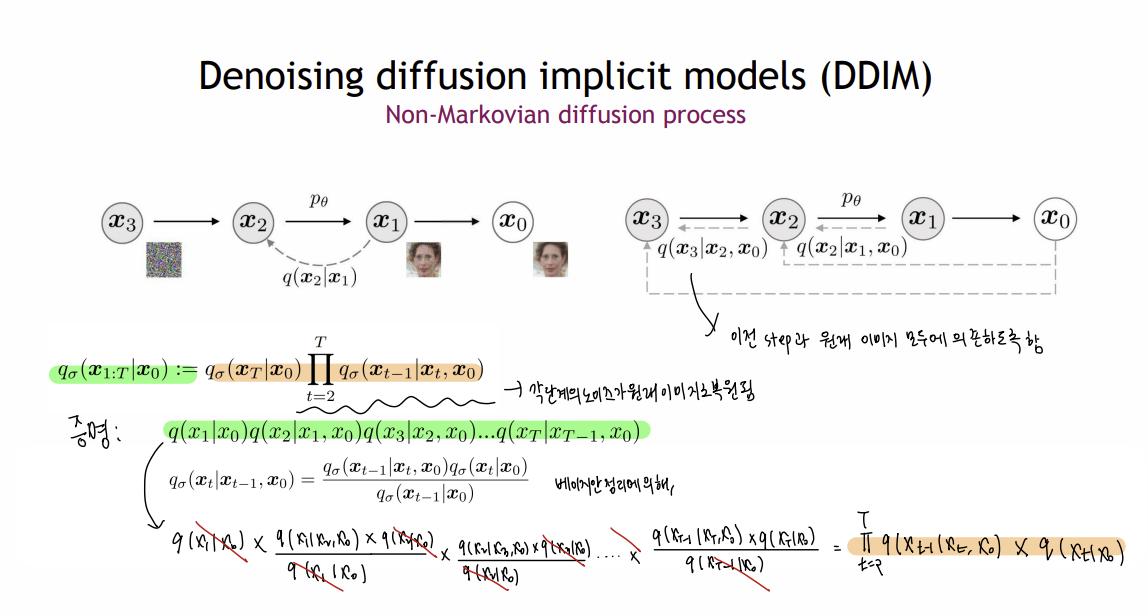
Non-Markovian Process 과정을 베이지안 정리에 따라서 정리한 과정이다
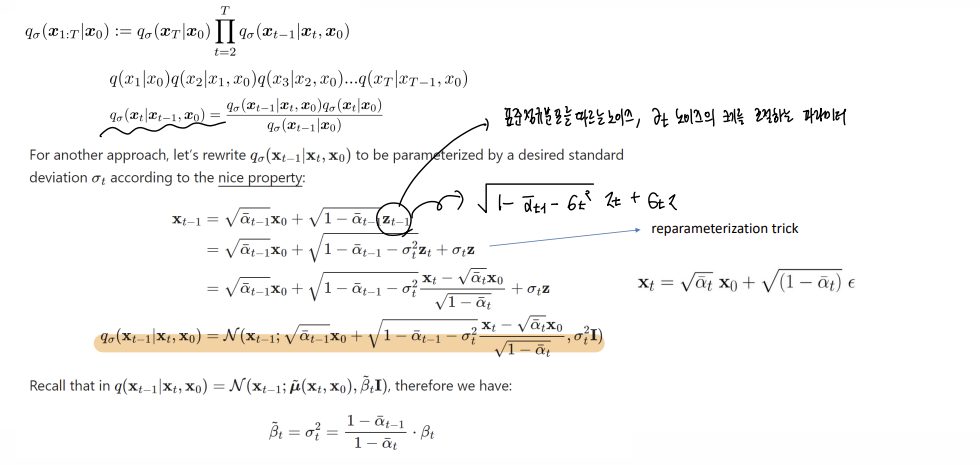
DDIM의 Reverse Diffusion Process 을 다음과 같으 표현할 수 있다

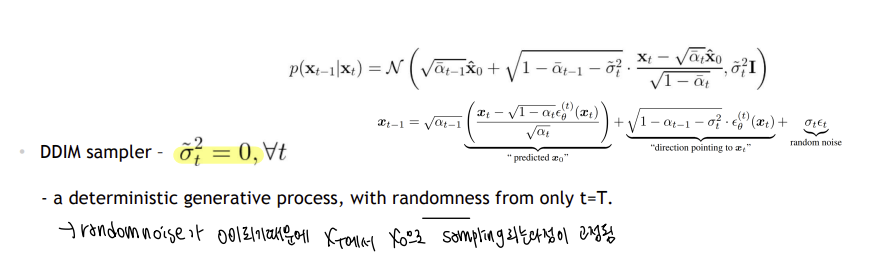
- sigma가 0이 되게 되면, random noise 성분이 제거되어, deterministic 된다. 이는 Reverse Diffusion Process에서 각 단계까 확률적으로 결정되지 않고, 특정한 값으로 고정됨
-> 즉, DDPM은 reverse duffusion process 과정에서 p라는 새로운 분포를 학습하여 실제 q에 근사하는 것이고 DDIM 은 원래 알고 있는 q를 직접적으로 사용함
3 Score-based Generative Modeling with Differential Equations
Forward Diffusion SDE
기존의 Foward Diffusion Process를 시간에 따라 noise 의 분포가 어떻게 변하는 지를 나타냄
- (t)는 시간 t에 따라 노이즈의 크기를 조절하는 함수이며 식을 다음과 같이 정리할 수 있다
(사진)
이산적인 시간 단계에서 연속적인 시간 단계로 변환된 확률 미분 방정식 (SDE)이다
Reverse Generative Diffusion SDE
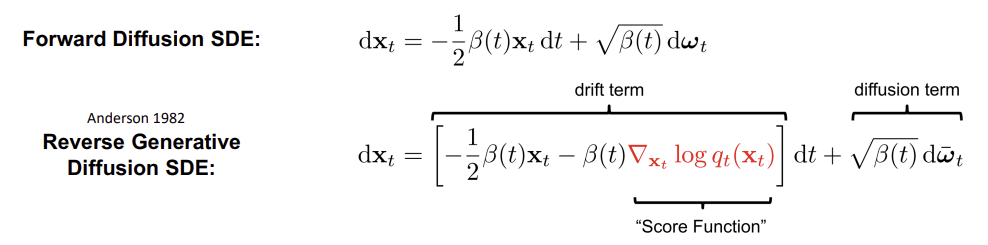
-
Reverse Generative Diffusion SDE 에서 drift term 에 score function ( 확률밀도 함수 의 로그 도함수로 데이터 분포의 변화율 ) 을 도입함
-
데이터가 밀집된 영역으로 모델의 수렴하도록 하여, 생성된 데이터가 원본 데이터와 더 유사하게 만듦
그러면 , 를 어떻게 구할 수 있을까?
Score Matching
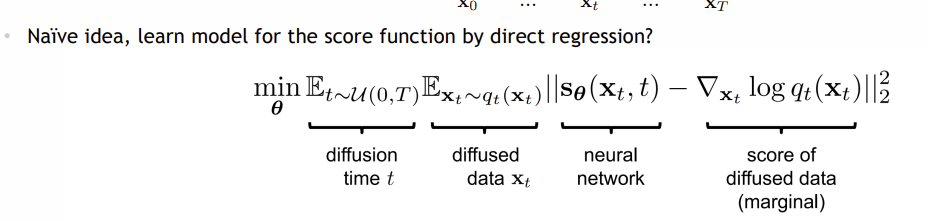
score function 을 direct regression 방식으로 학습하는 모델에서는 를 직접적으로 계산해야하는데, 이는 계산적으로 실현 불가능함
Denoising Score Matching
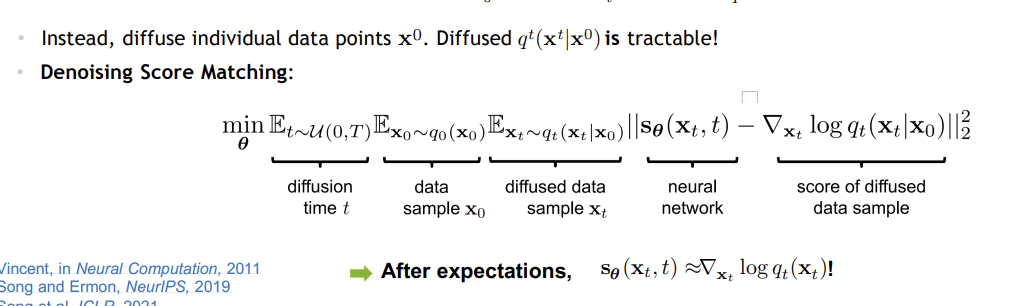
- : 시간 t와 데이터 를 입력으로 받아서 예측한 score function, 는 신경망의 parameter
- 주어진 초기 데이터 로부터 확산된 의 분포 의 로그 확률밀도의 기울기를 계산할 수 있음
- 수식의 각 기댓값을 계산한 후 , 신경망 이 실제 score function 에 근사하게 됨
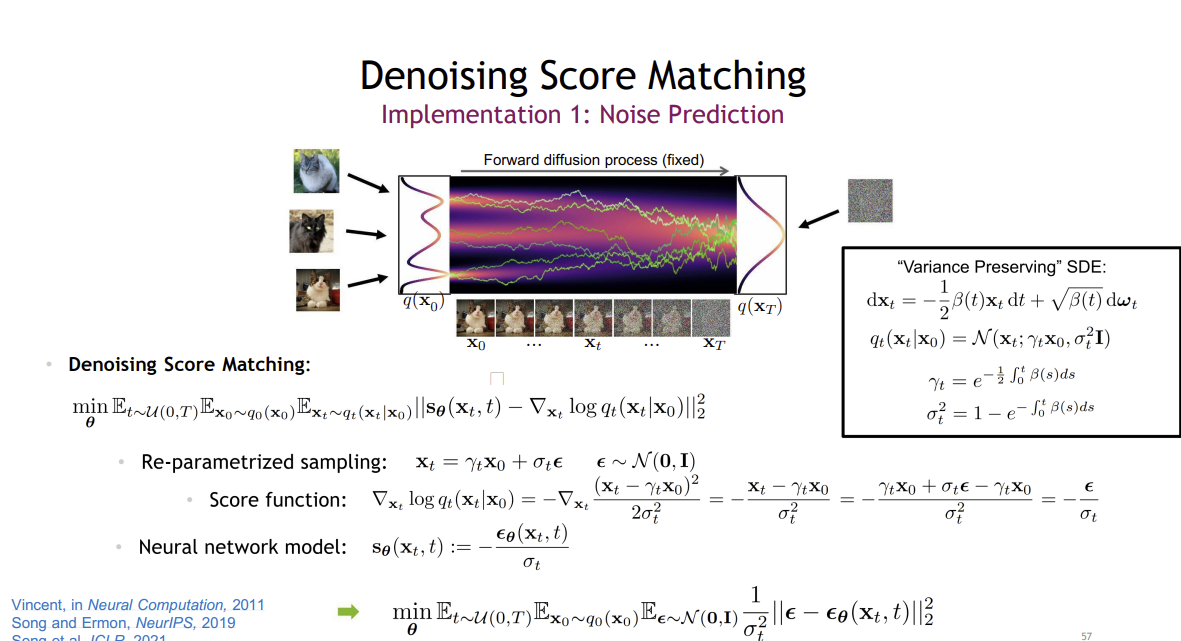
결론적으로 최종 최적화 과정을 다음과 같이 표현할 수 있다
->DDPM과 DDIM의 Loss 함수와 매우 유사함을 확인 할 수 있음
Probability Flow ODE
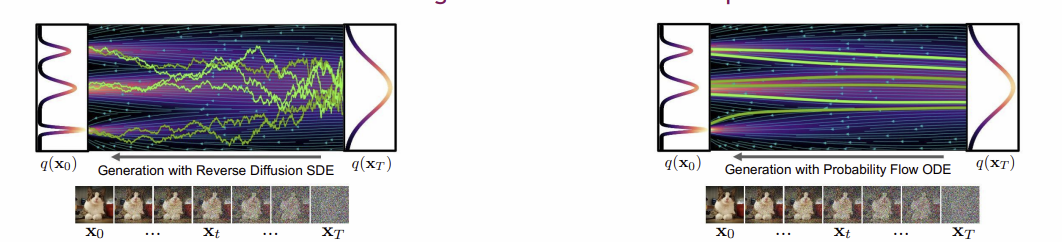

ODE 은 SDE 에서 noise 항이 없는 deterministic 로, 계산이 더 효율적이고 더 높은 안전성과 정확성을 제공할 수 있음
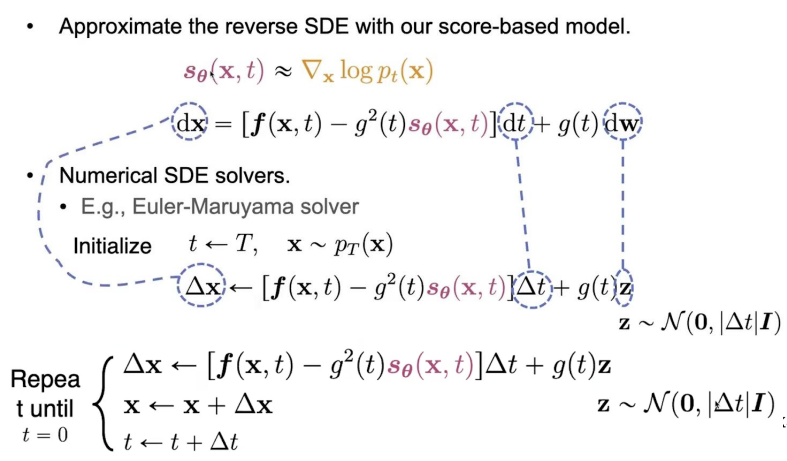
일때 다음과 같이 표현할 수 있으며,
Euler-Maruyama solver 방법을 활용하여 t=0이 될때까지 업데이트하여, SDE를 수치적으로 해결할 수 있음
