- 참고할 책 : Behavior Trees in Robotics and AI (Michele Colledanchise and Petter Ogren, 2022)
- nav2 공식문서: Nav2 Behavior Trees — Nav2 1.0.0 documentation
- BehaviorTree.CPP 공식문서: About | BehaviorTree.CPP
nav2 기본 BT
-
navigate_to_pose_w_replanning_and_recovery.xml
-
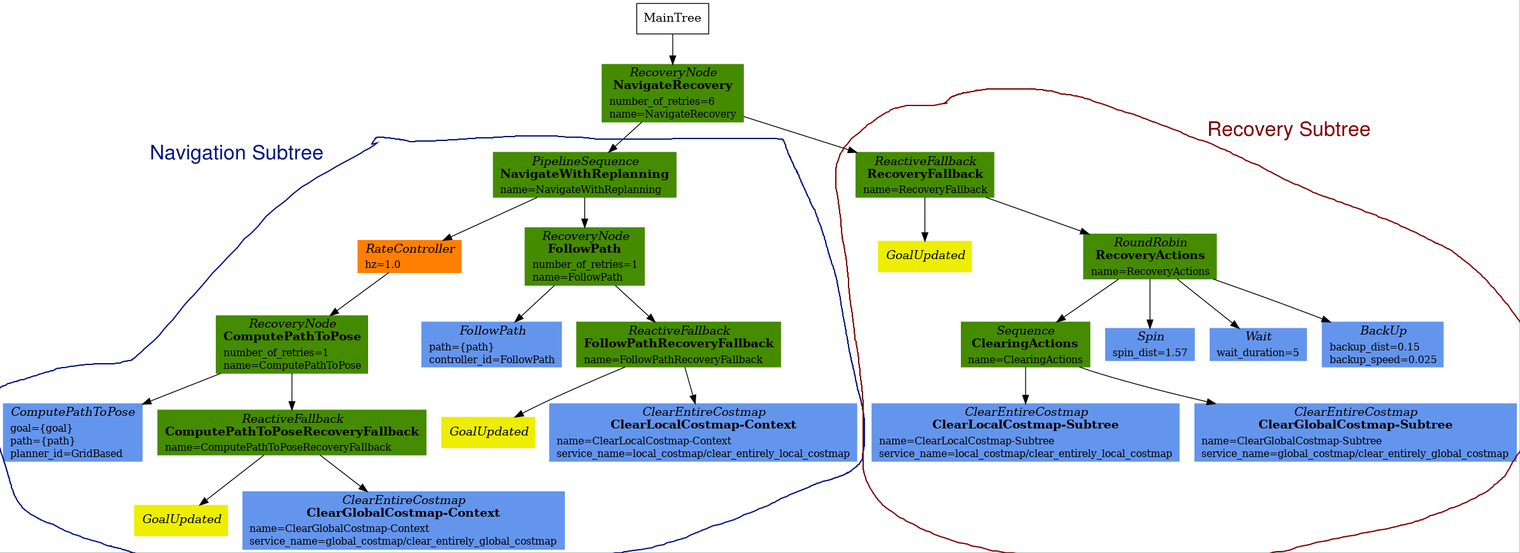
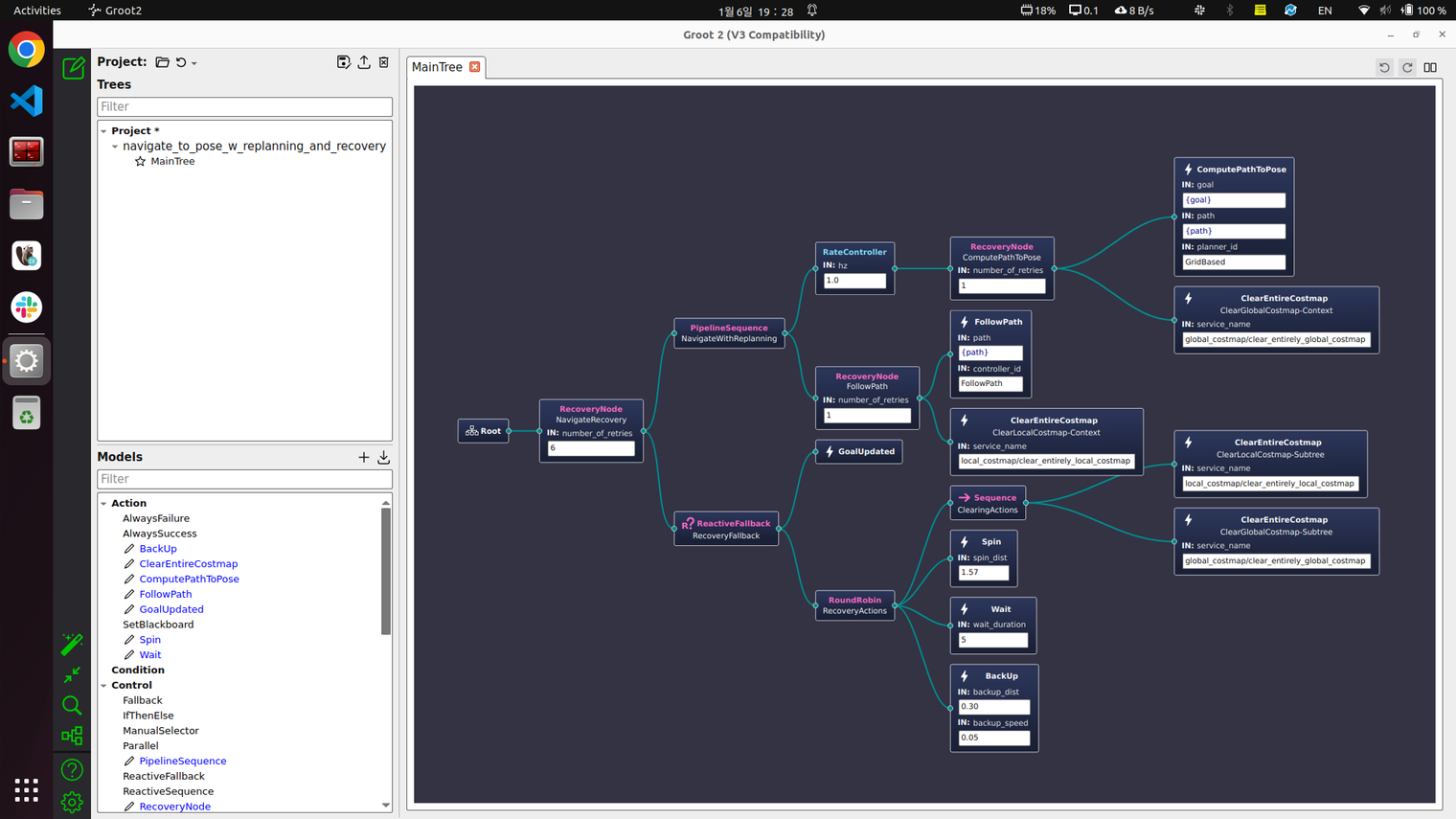
Groot2에서 확인한 트리
-
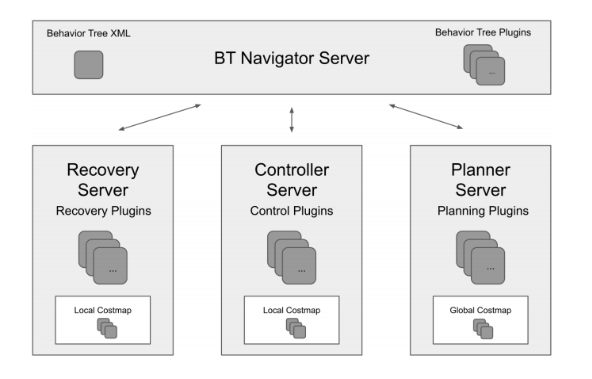
Navigation Subtree는 3개의 파트로 이루어짐
- 경로 계산
- 경로 이동
- a 또는 b가 실패했을 때 RecoveryFallback → ClearGlobal(Local)Costmap-Context
-
The
ComputePathToPosesubtree clears theglobal costmap. The global costmap is the relevant costmap in the context of the planner 경로 계산 실패 시 글로벌 코스트맵을 초기화. global path planning(기본값: A star 알고리즘)과 관련된 알고리즘. -
The
FollowPathsubtree clears thelocal costmap. The local costmap is the relevant costmap in the context of the controller 경로 이동 실패 시 로컬 코스트맵을 초기화. local path planning(기본값: DWB -- Dynamic Window Approach의 변형) -
Navigation Subtree에서의 RecoveryFallback이 충분하지 않은 경우, Navigation Subtree는 Failure를 리턴하고 Recovery Subtree 노드로 이동해서 시스템 레벨의 모든 navigation failure를 삭제
-
실제 파일 경로: /opt/ros/humble/share/nav2_bt_navigator/behavior_trees/navigate_to_pose_w_replanning_and_recovery.xml
기본 BT 적용 시 문제점
- 1초에 1번씩 경로를 재설정하는데, 재설정이 필요하지 않고 최초 경로대로 움직이면 되는 경우에도 계속해서 재설정하는 모습을 자주 볼 수 있다. (특히 꺾어서 움직여야 하는 경우)
- 장애물이 움직이지 않는다고 가정하므로, 장애물이 동적인 경우에 멈추지 않고 계속해서 움직이고, 대상(ex. 사람)이 움직이는 순간에 충돌하는 경로로 잘못 설정할 수 있다.
- 경로 계산/이동 실패 시 Reactive Fallback 발생 -> 물러나고 5초 기다리는 동작이 시간을 많이 소모한다.
- 어떻게 변경할까?
-> 장애물 감지 시 멈추는 행동트리(Navigate To Pose and Pause Near Goal-Obstacle — Nav2 1.0.0 documentation)를 응용해 보자.
->MonitorAndFollowPathSubtree를 사용해서 더 긴 경로(PathLongerOnApproach)가 감지되면 CancelingControlAndWait 로 로봇의 컨트롤을 취소하고 지정된 시간(위에서는 5초) 동안 대기시킨다. 지정된 시간이 지난 후 1번 더 기존 경로보다 긴 경로를 감지했는지 확인 후, 장애물이 없다면 기존 경로대로 이동하고 장애물이 있다면 새로운 경로대로 이동한다.
