This time...
- color spaces
- color histogram
- histogram of oriented gradients (HOG)
- pedestrian detection, object classification 등
Color Space
- HSV color space
- Hue : 각도, Saturation : 원점에서의 거리, Value: 높이 - CIE Luv
- 거리가 같으면 사람이 인지하는 색차이가 같다.
Color Histograms
이미지의 색상정보 분포를 분석하여 비슷한 사진을 찾는다.
-> 이미지를 추상화할 수 있는 강력한 수단
<필수 요소>
robostness
distinctiveness
구동 순서
- noise 제거
- 가우시안 필터링
- image resize
ex) 100x200 -> 3x6 img
- 자잘한 noise 삭제
- 작아진 픽셀 -> histogram 속도 상승
- img를 HSV space로
- Hue 값만 사용한다.
- Hue 값을 나눈다.
ex) 4bin으로 나눈다. (0~90,90~180,180~270,270~360) 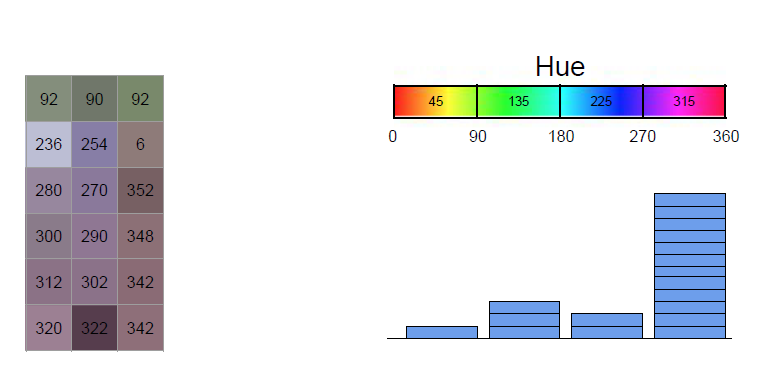
- 중간에 걸친 값 (ex. 90,180,270)인 경우 반으로 나눠서 할당한다.
-> bias 문제 감소
Bhattacharyya Coefficient
: 각 히스토그램을 확률값으로 바꾼다.
(두 이미지를 비교할 때,)
1. 두 히스토그램을 비교할때, 각각의 카운트 값을 전체 픽셀 값으로 나눠준다.
-> 전체합은 1, 모든 수 0~1 사이에 떨어지는 확률값
2. BC(p,q) = 동일한 위치에 있는 p값과 q값을 곱한거에 루트 씌우고 모두 더한값
3. BC(p,q)가 0에 가까울수록 다른 이미지이고, 1일 경우 동일한 이미지이다.
** 이미지의 색 분포가 비슷한 경우
이미지를 여러번 분할하여 각 분할된 부분의 히스토그램을 생성하여 비교한다.
-> 위치정보를 남겨놓을 수 있다.
Histogram of Oriented Gradients


1. Input Image
2. Normalize gamma & colour
사람 눈처럼 바꾸기
- 컬러스페이스를 바꾼다.
- 밝기 조정한다.
3. Compute gradients
LUV 스페이스로 바꾸고 색상 채도는 필요없기 때문에 L값만 추출한다.
그래디언트를 얻기 위한 필터들
-
mean filter
-
The soble operator
x로의 미분, y로의 미분, 그래디언트의 크기값(The standard defn. of the Sobel operator omits the 1/8 term doesn’t make a difference for edge detection the 1/8 term is needed to get the right gradient value)
4. Weighted vote into spatial & orientation cells
그래디언트 두 개를 활용해 히스토그램 얻기
1. 이미지를 셀로 나눈다.
2. 셀 하나마다 gradient의 방향과 크기를 얻는다.
3. 히스토그램에 voting한다.
- x축은 각도, y축은 그래디언트 크기
5. Contrast normalize over overlapping spatial blocks
- sobel operater 결과 이미지는 smooth된 결과를 갖는다.
-> 근처 히스토그램이 비슷한 분포를 가질 것이다 가정
-> 한번 더 정규화 해준다.

이런저런 공부 기록