nn.Conv2d 는 Pytorch에서 제공하는 2D Convolution 레이어 클래스이다. 이미지나 2D 데이터 특징 추출에 주로 사용된다.
1. nn.Conv2d 클래스
nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, **groups**=1, bias=True)
- in_channels : (int) 입력 채널의 개수
- out_channels : (int) 출력 채널의 개수 = 컨볼루션 필터 개수
- 값이 클수록 복잡한 특징 학습 가능하지만, 모델의 파라미터 수 증가
- kernel_size : (int) or (tuple) 컨볼루션 필터의 크기
- stride : (int) or (tuple) 필터의 이동 간격 (default = 1)
- 값 커질수록 출력 특징 맵 크기 작아짐
- padding : (int) or (tuple) 입력 데이터 가장자리에 추가되는 패딩 크기 (default = 0)
- 패딩 사용시 입력 데이터 가장자리 정보 유지 가능
- 가장자리 여백이 많고 주요 정보가 이미지 가운데 있을 경우 패딩 쓸 필요 X (반대로, 가장자리에 이미지 특징 정보가 많다면 패딩 사용)
- dilation : (int) or (tuple) 딜레이션(dilation) 레이트는 필터의 간격을 더 크게 두어 더 넓은 영역의 정보를 가져오는 데 사용 (default = 1)
- 값이 커질수록 필터의 영역이 더 넓어짐
- groups : (int) or (optional) 입력 및 출력 채널을 묶는(grouping) 개수(default = 1)
- 값이 클수록 채널 간의 관련성 줄이는 효과
- bias : (bool) 편향(bias)을 사용할지 여부 결정하는 플래그 (default = True)
2. Conv2d Model shape 계산
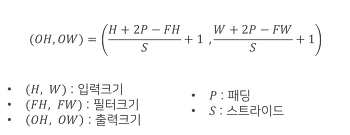
- Conv2d 계산법 간단한 버전
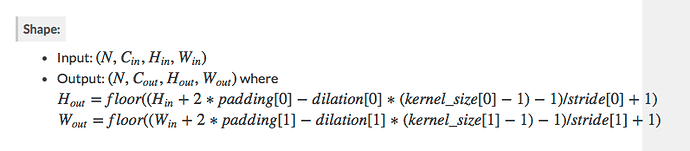
- Conv2d 계산법 dilation 추가 버전
- 풀링 계산법
출력 크기 = 입력 크기 / kernel_size
위에 계산식을 활용해 ResNet에서 유래된 Residual Block을 사용한 모델 입출력 shape을 계산해보자
import torch
import torch.nn as nn
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
self.shortcut = nn.Conv2d(in_channels, out_channels, kernel_size=1)
self.relu = nn.ReLU()
def forward(self, x):
shortcut = self.shortcut(x) # Shortcut connection -> 입력값의 채널 수를 out_channels로 맞춰주기
x = self.conv1(x) # 특징 추출 -> 크기, 채널 수 동일
x = self.relu(x)
x = self.conv2(x) # 특징 추출 -> 크기, 채널 수 동일
x = x + shortcut # Add the shortcut to the output -> 출력값에 입력값 정보 전달하여 학습 원활하게 만들기
x = self.relu(x)
return x
class CNNWithResidual(nn.Module):
def __init__(self):
super(CNNWithResidual, self).__init__()
self.conv1 = nn.Conv2d(1, 32, kernel_size=3, padding=1)
self.resblock1 = ResidualBlock(32, 64)
self.resblock2 = ResidualBlock(64, 128)
self.pool = nn.MaxPool2d(kernel_size=2, stride=2)
self.fc1 = nn.Linear(128 * 7 * 7, 512)
self.fc2 = nn.Linear(512, 10)
def forward(self, x):
x = self.conv1(x)
x = self.pool(torch.relu(x))
x = self.resblock1(x)
x = self.pool(x)
x = self.resblock2(x)
x = self.pool(x)
x = x.view(-1, 128 * 7 * 7) # Flatten the tensor
x = torch.relu(self.fc1(x))
x = self.fc2(x)
return x
[ 모델 흐름과 크기 계산 ]
| Layer | Input size | Output size | Description |
|---|---|---|---|
| Conv1 + ReLU | (28, 28, 1) | (28, 28, 32) | 특징 추출 |
| MaxPool | (28, 28, 32) | (14, 14, 32) | 차원 축소 |
| Residual Block 1 | (14, 14, 32) | (14, 14, 64) | Residual Block (단축 경로) |
| MaxPool | (14, 14, 64) | (7, 7, 64) | 차원 축소 |
| Residual Block 2 | (7, 7, 64) | (7, 7, 128) | Residual Block (단축 경로) |
| MaxPool | (7, 7, 128) | (3, 3, 128) | 차원 축소 |
| Flatten | (3, 3, 128) | (1152, ) | 펼치기 (2D -> 1D) |
| fc1 + ReLU | (1152, ) | (512, ) | 특징 결합 |
| fc2 | (512, ) | (10, ) | 라벨 분류 (0~9 라벨) |
- Conv1 + ReLU
- 입력 크기:
(28, 28, 1)→ 출력 크기:(28, 28, 32) - [ 계산 ]
- 커널 크기: 3, 패딩: 1, 스트라이드: 1
- 출력 크기:
출력 크기= (128−3+2×1) / 1+1 =28
따라서 출력 크기는(28, 28, 32)이다.
- MaxPool
- 입력 크기:
(28, 28, 32)→ 출력 크기:(14, 14, 32) - [ 계산 ]
- 풀링 크기:2x2, 스트라이드:2
- 출력 크기:
출력 크기= 28 / 2 =14
따라서 출력 크기는(14, 14, 32)이다
- Residual Block 1
- 입력 크기:
(14, 14, 32)→ 출력 크기:(14, 14, 64) - [ 계산 ]
- 첫 번째 Residual Block은 두 개의3x3컨볼루션과 1x1 커널의 단축 경로를 가진다.
- 컨볼루션 후, 크기는 변화가 없으므로 출력 크기는(14, 14, 64)이다.
- MaxPool
- 입력 크기:
(14, 14, 64)→ 출력 크기:(7, 7, 64) - [ 계산 ]
- 풀링 크기:2x2, 스트라이드:2
- 출력 크기:
출력 크기= 14 / 2 =7
따라서 출력 크기는(7, 7, 64)이다.
- Residual Block 2
- 입력 크기:
(7, 7, 64)→ 출력 크기:(7, 7, 128 - [ 계산 ]
- 두 번째 Residual Block은 64 채널에서 128 채널로 변환한다. 출력 크기는
(7, 7, 128)이다.
- 두 번째 Residual Block은 64 채널에서 128 채널로 변환한다. 출력 크기는
- MaxPool
- 입력 크기:
(7, 7, 128)→ 출력 크기:(3, 3, 128) - [ 계산 ]
- 풀링 크기:2x2, 스트라이드:2
- 출력 크기:
출력 크기= 7 / 2 =3
따라서 출력 크기는(3, 3, 128)이다.
- Flatten
- 입력 크기:
(3, 3, 128)→ 출력 크기:(1152,) - [ 계산 ]
-Flatten은 3D 텐서를 1D 벡터로 변환한다:
3×3×128=1152
따라서 출력 크기는(1152,)이다.
- fc1 + ReLU
- 입력 크기:
(1152,)→ 출력 크기:(512,) - [ 계산 ]
- 이 부분은 완전 연결층으로, 1152 차원의 벡터를 512 차원의 벡터로 변환한다. ReLU 활성화 함수가 적용되어 비선형성이 추가된다.
- fc2
- 입력 크기:
(512,)→ 출력 크기:(10,) - [ 계산 ]
- 마지막 출력층은 512개의 뉴런을 10개의 클래스(0~9까지)로 매핑하는 완전 연결층이다. 각 클래스에 대해 최종 예측 값을 출력한다.
참고1 ) Residual Block
[ 깊어지는 레이어로 인한 문제와 해결법 ]
Plain Network (단순히 Layer를 깊게 쌓음) 에서 발생하는
Vanishing Gradient (기울기 소실) , Overfitting (과적합) 등의 문제를 해결하기 위해
ReLU, Batch Nomalization 등의 많은 기법이 있다.
Residual Block도 그 기법 중 하나이다.
[ Residual Block ]
Residual Block은 ResNet(Residual Networks)에서 유래한 개념으로, 네트워크의 깊이가 깊어짐에 따라 발생할 수 있는 vanishing gradient 문제를 해결하기 위한 방법이다.
Residual Block은 기본적으로 두 개의 컨볼루션 레이어로 이루어져 있지만, 중요한 점은 shortcut(skip) connection(단축 경로)이라는 개념을 통해 입력값을 출력값에 더한다는 것이다.
이렇게 함으로써 출력값에 원본 입력값의 정보를 그대로 전달하여 학습을 더 원활하게 만든다.
[ Residual Block 설명 ]
- 입력값
x: Residual Block에 입력되는 텐서다. shortcut:shortcut = self.shortcut(x)는 단축 경로(skip connection)로, 입력값x를 그대로 지나가게 하여 입력값을 출력에 더하는 역할을 한다. 이를 통해 채널 수가 맞지 않으면 1x1 컨볼루션을 사용하여 맞춰준다.- 첫 번째 컨볼루션 (
conv1):x는 첫 번째 3x3 컨볼루션을 거쳐out_channels차원의 출력으로 변환된다. - ReLU 활성화 함수 (
relu): ReLU 함수로 비선형성을 추가한다. - 두 번째 컨볼루션 (
conv2):x는 두 번째 3x3 컨볼루션을 통과하여 다시out_channels차원으로 출력된다. - Residual 연결:
x와shortcut을 더한 후 ReLU를 적용한다. 이 단축 경로를 통해 입력값이 네트워크를 통과하면서 정보가 손실되지 않도록 보장한다. - Residual Mapping Residual Block에서 F(x)는 입력값
x가 컨볼루션 연산을 거친 후(즉,F(x))의 출력을 의미하며, 이 값은 입력값x와 더해져 esidual Mapping이 된다. 이렇게 더해진 값이 Residual Block을 통해 출력된다. Residual Block은 이 방식으로 기존의 정보를 유지**하면서 새로운 특징을 추출하게 해주어 더 깊은 네트워크에서도 성능 저하를 막을 수 있다.
참고 2 ) ConvNet Calculator
https://madebyollin.github.io/convnet-calculator/
위에 링크를 통해 쉽게 계산 가능하다~
[ 참고 ]
https://coding-yoon.tistory.com/141
https://pytorch.org/docs/master/generated/torch.nn.Conv2d.html#torch.nn.Conv2d (사진)
