1. Reference Frames
Vector quantities can be expressed in different reference frames.
-
Reference Frames
-
ECIF (Earth-Centred Inertial Frame)
- - x fixed w.r.t stars y fixed w.r.t stars z true north -
ECEF (Earth-Centred Earth-Fixed Frame)
- - x prime meridian (on equator) y Right-hand Rule z true north -
NED (North East Down)
- - x true north y true east z down (along gravity) -
ENU (East North Up)
- - x true east y true north z up -
Sensor & Vehicle
-
-
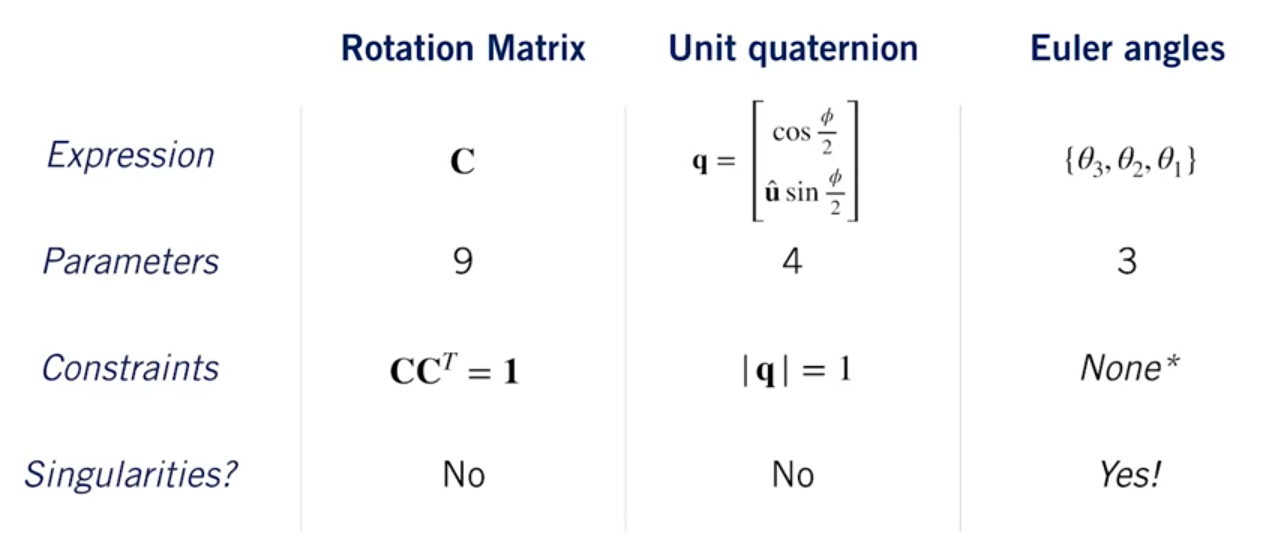
Rotations can be parameterized by rotation matrices, quaternions or Euler angles.
2. IMU (Inertial Measurement Unit)
-
An 6-DoF IMU is typically composed of
- Gyroscopes
measure angular rotation rates about three separate axes. - Accelerometers
measure accelerations along three orthogonal axes.
- Gyroscopes
-
Measurement Model
-
Gyroscope
- : angular velocity of the sensor expressed in the sensor frame
- : slowly evolving bias
- : noise term
-
Accelerometer
- Instead of measuring body accelerations directly as we could do with rotational rates, we need to explicitly remove the effect of gravity using our fundamental equation for accelerometers in a gravity field.
- : orientation of the sensor (computed by integrating the rotational rates from the gyroscope)
- : bias term
- : noise term
- : gravity in the navigation frame
-
-
Since strapdown IMUs are tricky to calibrate and drift over time, we'll need another sensor to periodically correct our posed estimates.
3. GNSS (Global Navigation Satellite Systems)
-
Computing Position
- Each GPS satellite transmits a signal that encodes
- its position
(via accurate ephemeris information) - time of signal transmission
(via onboard atomic clock)
- its position
- To compute a GPS position fix in the Earth-centred frame, the receiver uses the speed of light to compute distances to each satellite based on time of signal arrvial.
- At least four satellites are required to solve for 3D position, three if only 2D is required.
- Each GPS satellite transmits a signal that encodes
-
Trilateration
- different from Triangulation
- For each satellite, we measure the pseudorange as follows:
- : receiver (3D) position
- : position of satellite
- : receiver clock error
- : atmospheric propagation delay
- : measurement noise
- : speed of light
- : time sent, time received
- By using at least 4 satellites, we can solve for:
- and
-
Error sources
- Lonospheric delay (charged ions in the atmosphere)
- Multipath effects (surrounding terrain or buildings)
- Ephemeris & clock errors
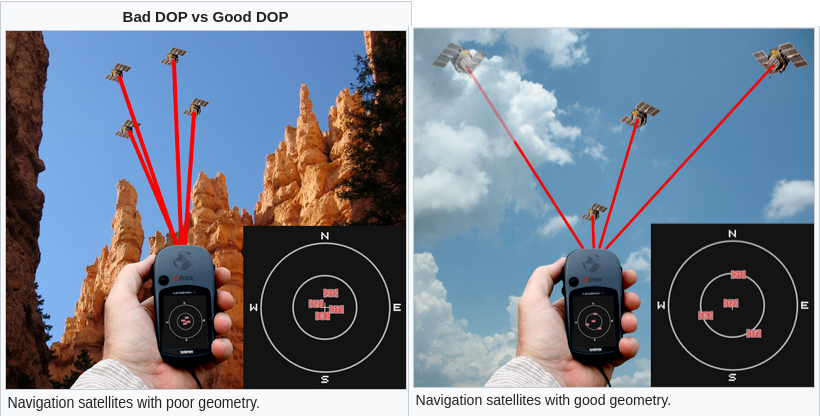
- GDOP (Geometric Dilution of Precision)
-
How to improve accuracy
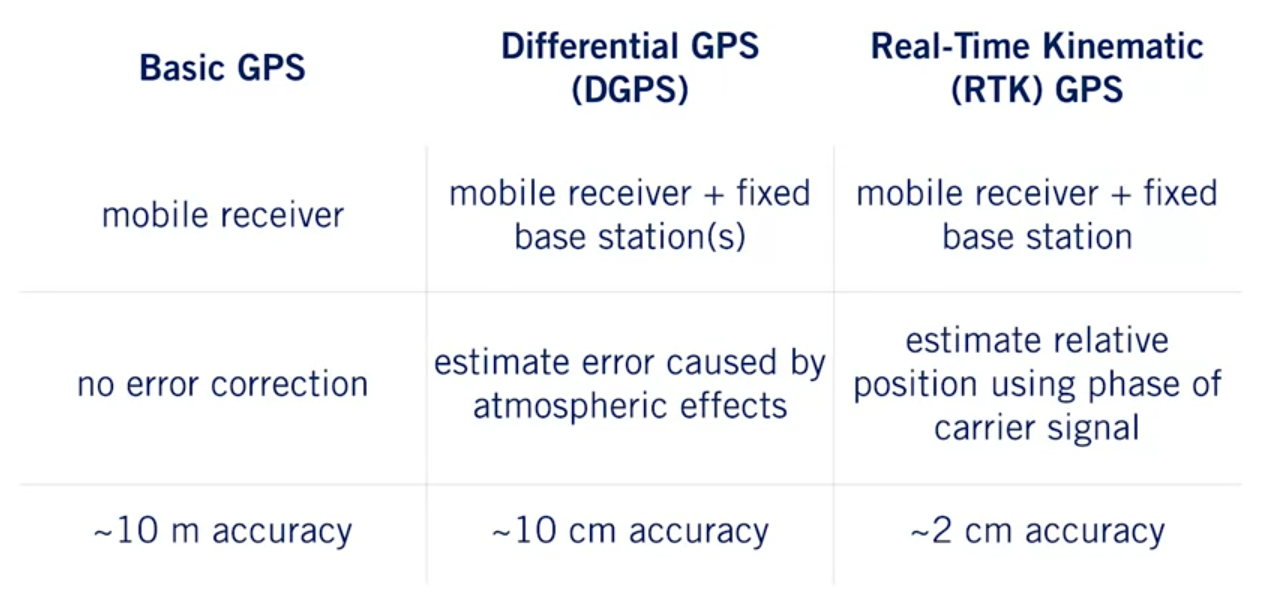
-
Inertial sensors are useful for navigation but tend to drift, leading to increasing errors over time. On the other hand, GPS provides consistent positioning accuracy with bounded errors. A self-driving car using GPS will maintain reliable accuracy unless the GPS receiver fails or loses connection with at least four satellites.
4. LiDAR
-
Measuring distance with Time-of-Flight
- : Distance
- : Speed of light
- : Time elapsed (round-trip)
-
Measurement Models for 3D LiDAR Sensors
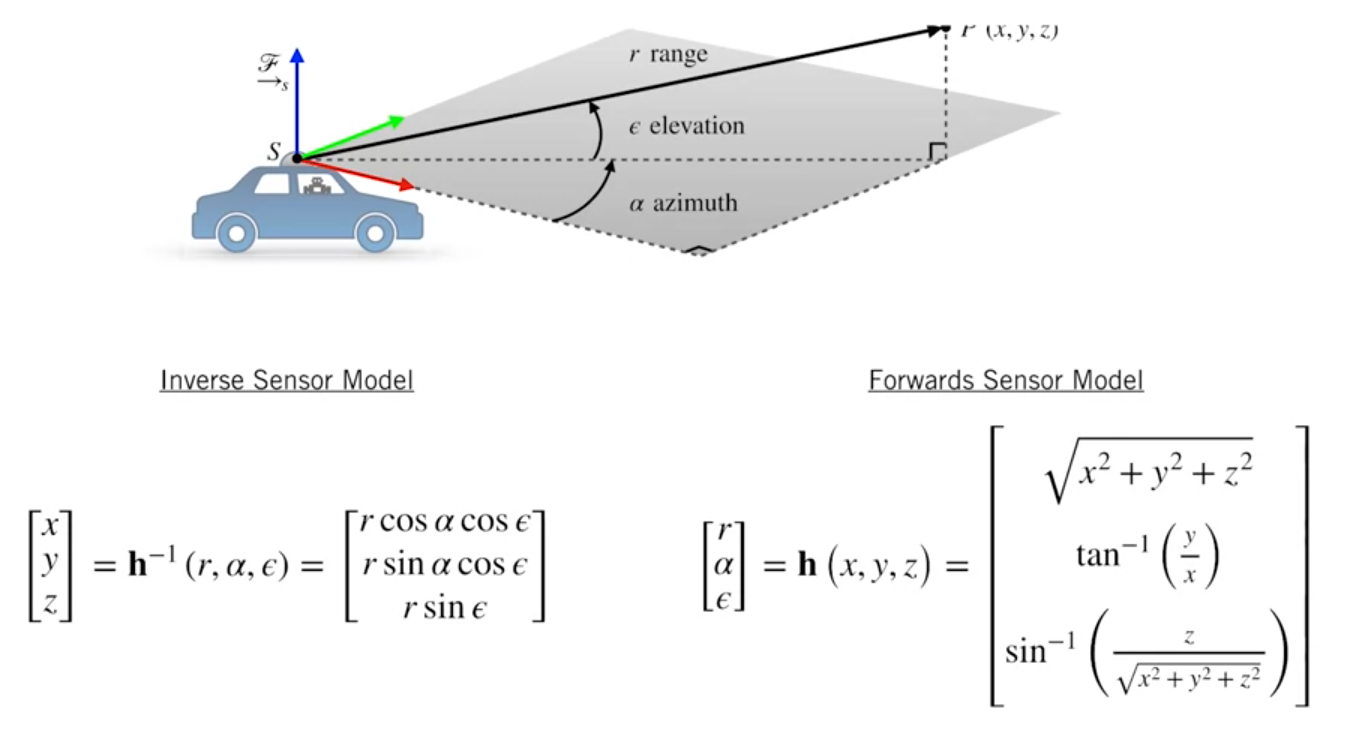
-
Measurement Noise
- Sources
- Uncertainty in determining the exact time of arrival of the reflected signal
- Uncertainty in measuring the exact orientation of the mirror
- Interaction with the target (surface absorption, specular reflection, etc.)
- Variation of propagation speed (e.g. through materials)
- Term
- Covariance: empirically determined or manually tuned
- Sources
-
Motion Distortion
- For a vehicle which moves quickly, each point in a scan is taken from a slightly different place.
-
Translation, Rotation and Scaling
-
Translation
-
Rotation
-
Scaling
-
-
3D Plane Fitting
-
ICP Algorithm (Iterative Closest Point)
📙 강의
